标签:pre mat get 分布 create bmp res luci force
OpenCV可以检测图像的主要特征,然后提取这些特征、使其成为图像描述符,这类似于人的眼睛和大脑。这些图像特征可作为图像搜索的数据库。此外,人们可以利用这些关键点将图像拼接起来,组成一个更大的图像,比如将许多图像放在一块,然后形成一个360度全景图像。
这里我们将学习使用OpenCV来检测图像特征,并利用这些特征进行图像匹配和搜索。我们会选取一些图像,并通过单应性,检测这些图像是否在另一张图像中。
有许多用于特征检测和提取的算法,我们将会对其中大部分进行介绍。OpenCV最常使用的特征检测和提取算法有:
通过以下方法进行特征匹配:
可以采用单应性进行空间验证。
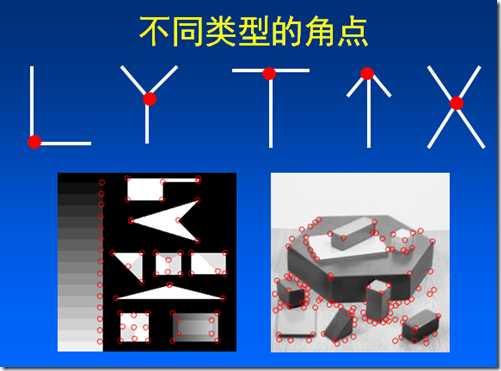
那么,究竟什么是特征呢?为什么一副图像的某个特定区域可以作为一个特征,而其他区域不能呢?粗略的讲,特征就是有意义的图像区域,该区域具有独特特征和易于识别性。因此角点及高密度区域都是很好的特征,而大量重复的模式或低密度区域(例如图像中的蓝色天空)则不是很好的特征。边缘可以将图像分为两个区域,因此也可以看做好的特征。斑点是与周围有很大差别的像素区域,也是有意义的特征。
大多数特征检测算法都会涉及图像的角点、边和斑点的识别,也有一些涉及脊向的概念,可以认为脊向是细长物体的对称轴,例如识别图像中的一条路。
由于某些算法在识别和提取某类型特征的时候有较好的效果,所以知道输入图像是什么很重要,这样做有利于选择最合适的OpenCV工具包。
在这之前其实我们已经接触过角点检测了,在相机标定的时候,我们就利用到了角点检测。不过那时候没有深入的去研究。在这里,我们将会深入原理取学习角点检测。
下面我们从使用cornerHarris()函数讲起。
cornerHarris(src, blockSize, ksize,k[,dst[,borderType]]);
函数 cornerHarris 对输入图像进行 Harris 边界检测。保存到输出图像中。输入图像中的角点在输出图像中由局部最大值表示。
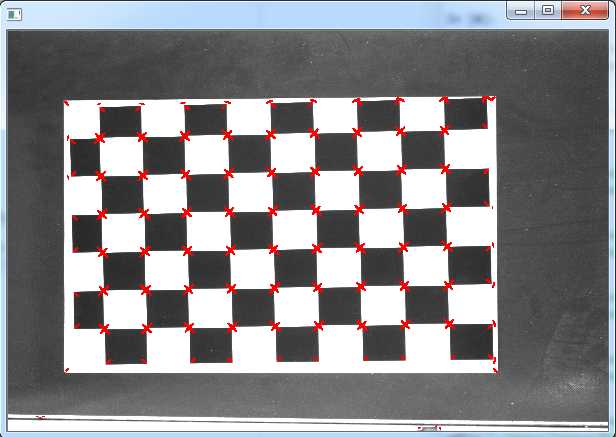
# -*- coding: utf-8 -*- """ Created on Mon Aug 20 20:17:34 2018 @author: lenovo """ ‘‘‘ Harris角点检测 ‘‘‘ import cv2 import numpy as np img = cv2.imread(‘./image/cali.bmp‘) img = cv2.resize(img,dsize=(600,400)) gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) gray = np.float32(gray) #角点检测 第三个参数为角点检测的敏感度,其值必须介于3~31之间的奇数 dst = cv2.cornerHarris(gray,3,23,0.04) print(dst.shape) #(400, 600) img[dst>0.01*dst.max()] = [0,0,255] cv2.imshow(‘‘,img) cv2.waitKey(0) cv2.destroyAllWindows()
运行结果如下:
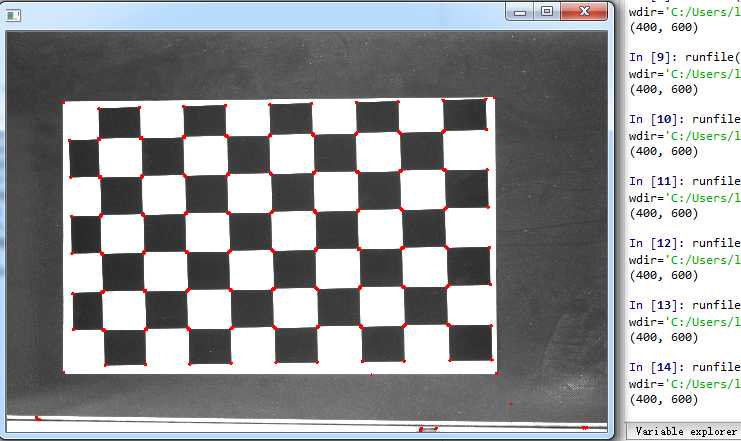
如果我们把第三个参数改为3:,可以看到:
上面我们已经通过实例演示了Harris检测的效果,相信你对Harris角点检测已经有了初步的认识。这里我将带你深入了解Harris角点检测的原理。
我们先来看一幅图片,了解一下什么是角点?

上图中E,F中的角我们通常称作角点(corner points),他们具有以下特征:
harris特征角最早在paper A Combined Corner and Edge Detector中被Chris Harris & Mike Stephens提出。
Harris角点检测的基本思想:算法基本思想是使用一个固定窗口在图像上进行任意方向上的滑动,比较滑动前与滑动后两种情况,窗口中的像素灰度变化程度,如果存在任意方向上的滑动,都有着较大灰度变化,那么我们可以认为该窗口中存在角点。
当窗口发生$[u,v]$移动时,那么滑动前与滑动后对应的窗口中的像素点灰度变化描述如下:
$$E(u,v)=\sum\limits_{x,y}w(x,y)[I(x+u,y+v)-I(x,y)]^2$$
参数解释:
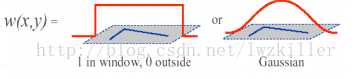
我们的窗口函数通常有如下两种形式:
根据上述表达式,当窗口在平潭区域上移动,可以想象得到,灰度不会发生什么变换。$E(u,v)=0$;如果窗口处在纹理比较丰富的区域上滑动,那么灰度变化会很大。算法最终思想就是计算灰度发生较大变化时所对应的位置,当然这个较大是指任意方向上的滑动,并非单指某个方向。
首先需要了解泰勒公式,任何一个函数表达式,均可有泰勒公式进行展开,以逼近原函数,我们可以对下面函数进行一阶展开(如果对泰勒公式忘记了,可以翻翻本科所学的高等数学)。
$$f(x+u,y+v)≈f(x,y)+uf_x(x,y)+vf_y(x,y)$$
那么
$$\sum\limits_{x,y}w(x,y)[I(x+u,y+v)-I(x,y)]^2$$
$$≈\sum\limits_{x,y}w(x,y)[I(x,y)+uI_x+vI_y-I(x,y)]^2$$
$$=\sum\limits_{x,y}w(x,y)[u^2I_x^2+2uvI_xI_y+v^2I_y^2]$$
$$=\sum\limits_{x,y}w(x,y)\begin{bmatrix}u & v\end{bmatrix}\begin{bmatrix} I_x^2 & I_xIy \\ I_xI_y & I_y^2\end{bmatrix}\begin{bmatrix}u \\ v\end{bmatrix}$$
$$=\begin{bmatrix}u & v\end{bmatrix}(\sum\limits_{x,y}w(x,y)\begin{bmatrix} I_x^2 & I_xIy \\ I_xI_y & I_y^2\end{bmatrix})\begin{bmatrix}u \\ v\end{bmatrix}$$
所以$E(u,v)$表达式可以更新为:
$$E(u,v)=\begin{bmatrix}u & v\end{bmatrix}M\begin{bmatrix}u \\ v\end{bmatrix}$$
其中:$M=\sum\limits_{x,y}w(x,y)\begin{bmatrix} I_x^2 & I_xIy \\ I_xI_y & I_y^2\end{bmatrix}$,$I_x$,$I_y$分别为窗口内像素点$(x,y)$在$x$方向上和$y$方向上的梯度值。
难道我们是直接求上述的$E(u,v)$值来判断角点吗?Harris角点检测并没有这样做,而是通过对窗口内的每个像素的$x$方向上的梯度与$y$方向上的梯度进行统计分析。这里以$I_x$和$I_y$为坐标轴,因此每个像素的梯度坐标可以表示成$(I_x,I_y)$。针对平坦区域,边缘区域以及角点区域三种情形进行分析:
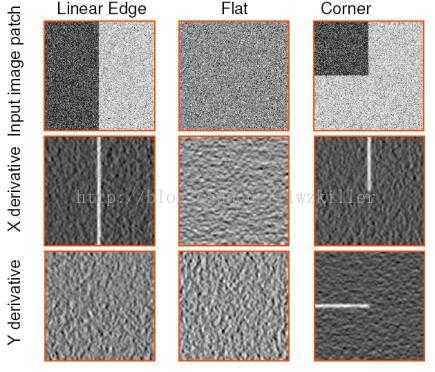
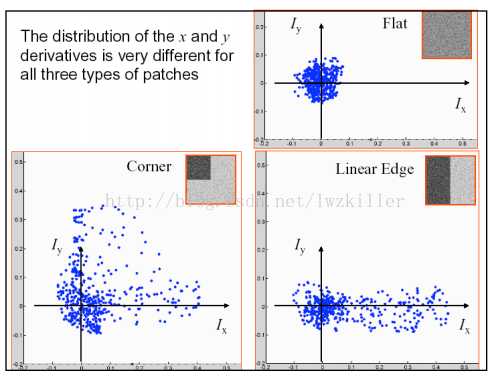
下图是对这三种情况窗口中的对应像素的梯度分布进行绘制:
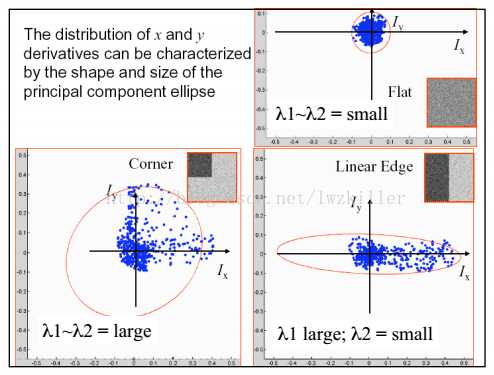
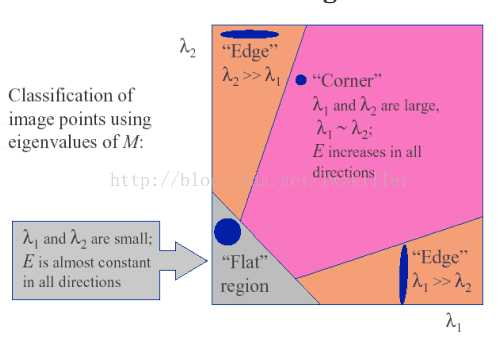
如果使用椭圆进行数据集表示,则绘制图示如下:
标签:pre mat get 分布 create bmp res luci force
原文地址:https://www.cnblogs.com/zyly/p/9508131.html