标签:数据信息 帧结构 net 避免 alt 单元 微处理器 ima network
CAN:Controller Area Network,控制器局域网
是一种能有效支持分布式控制和实时控制的串行通讯网络。
CAN-bus: Controller Area Network-bus,控制器局域网总线技术
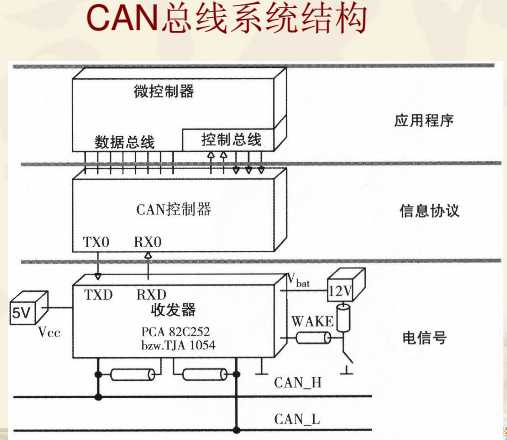
CAN总线系统结构
接收控制单元中微处理器发出的数据,处理数据并传给CAN收发器
将数据传到总线 or 从总线接收数据给控制器
避免数据传输终了反射回来
传输数据的数据线,两根 CAN-high and CAN-low,差分信号
CAN总线系统的数据传输
CAN总线节点上的节点发送数据是以报文的形式广播给网络中所有节点。收发器接收到数据就把数据传送给控制器,再由控制器检查判断是不是所需数据。不是则忽略。
CAN总线系统数据格式
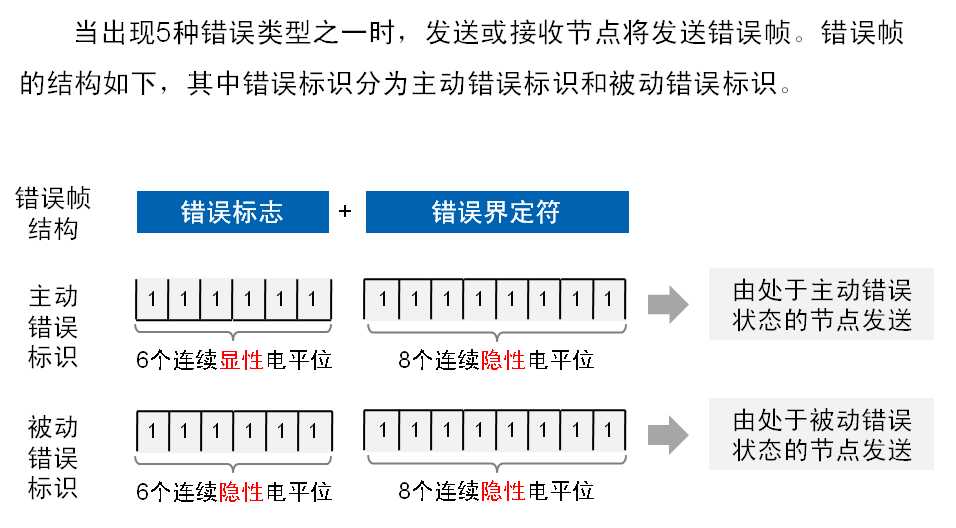
CAN-bus通信帧共分为数据帧、远程帧、错误帧、过载帧和帧间隔
五种类型。
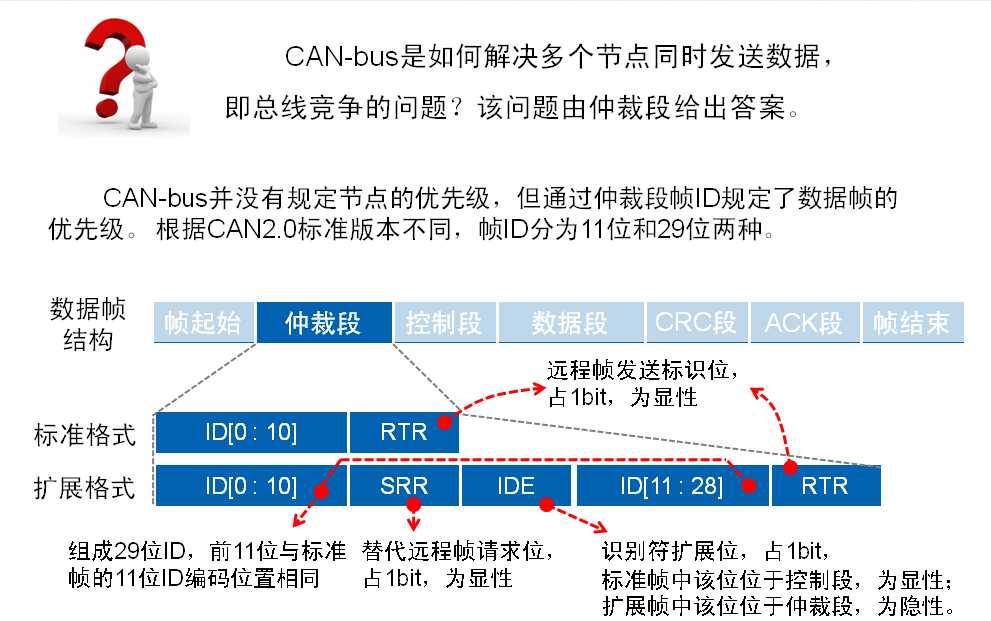
结构上由7个段组成,其中根据仲裁段ID码长度的不同,分为标准帧(CAN2.0A)和扩展帧(CAN2.0B)。
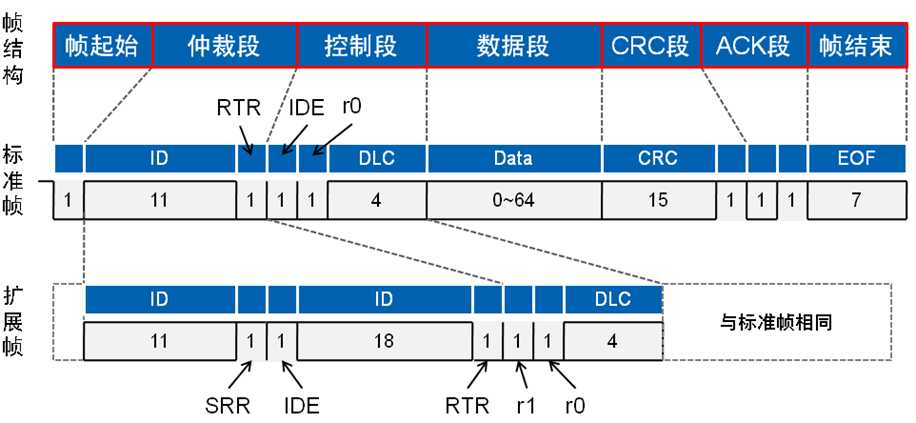
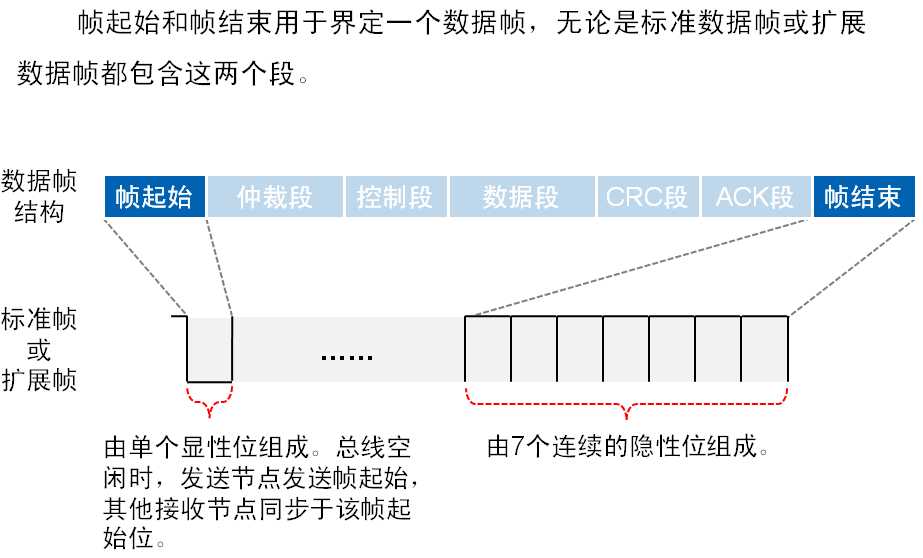
帧起始、帧结束
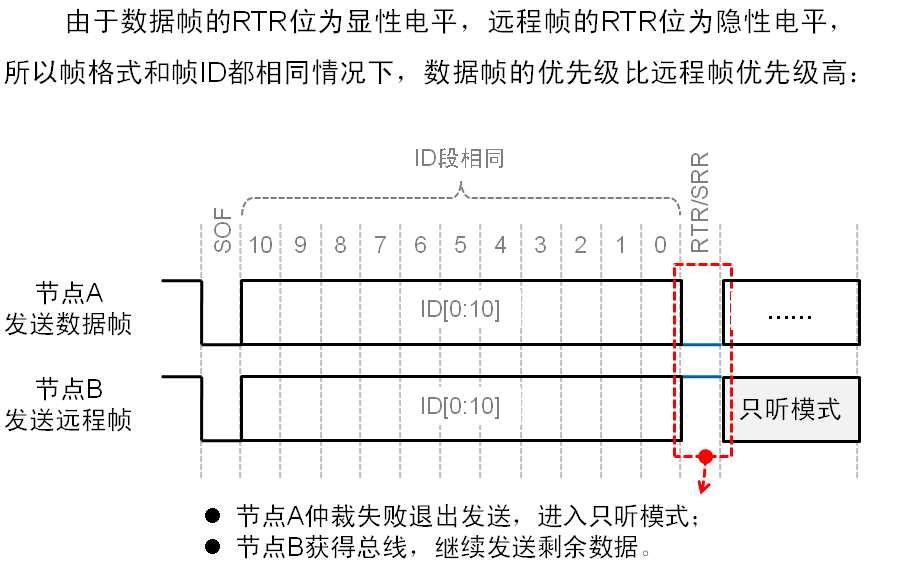
仲裁段
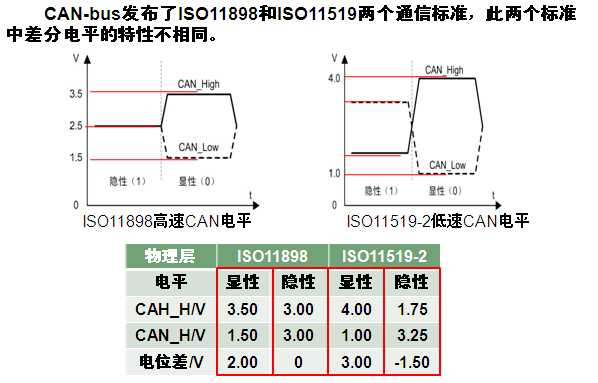
显性隐性
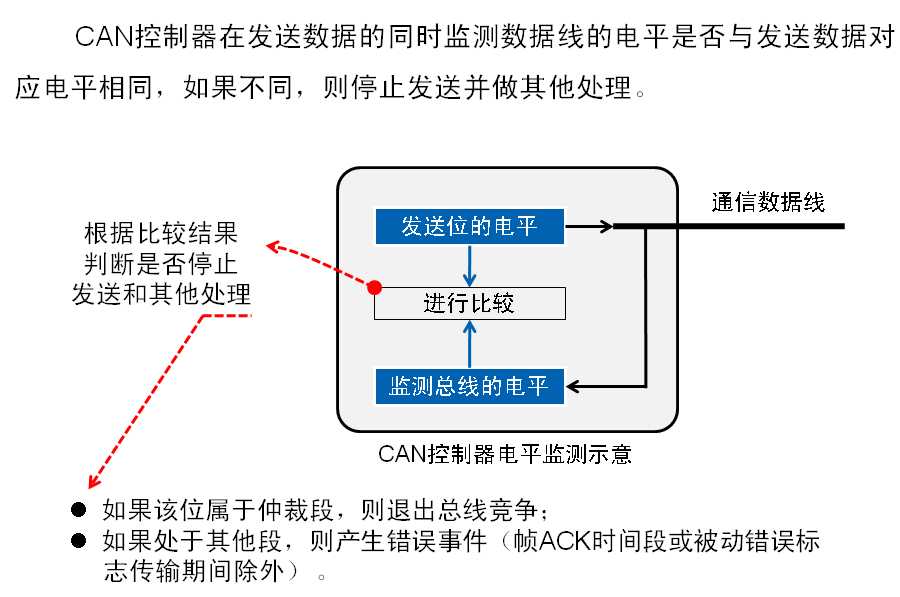
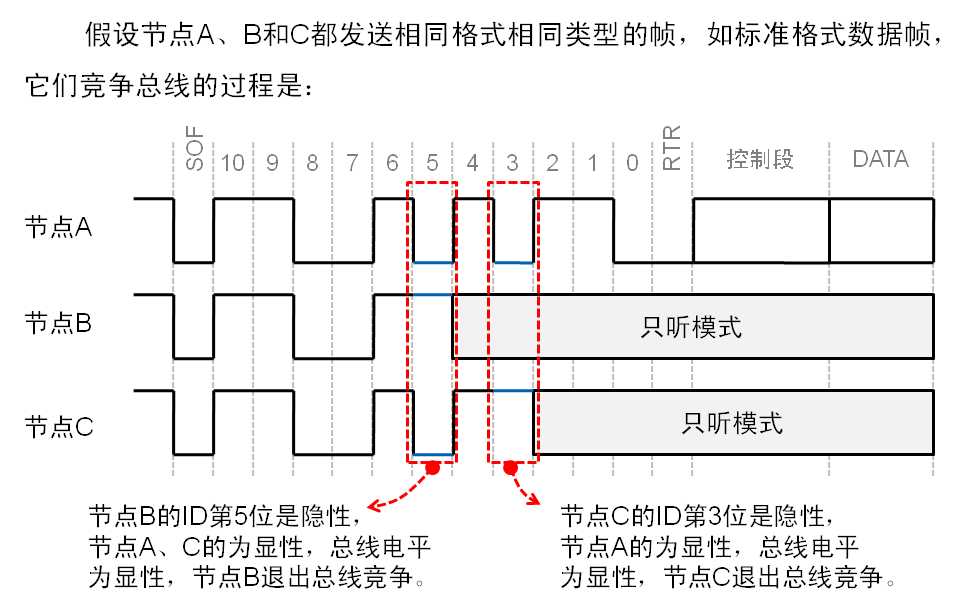
总线仲裁

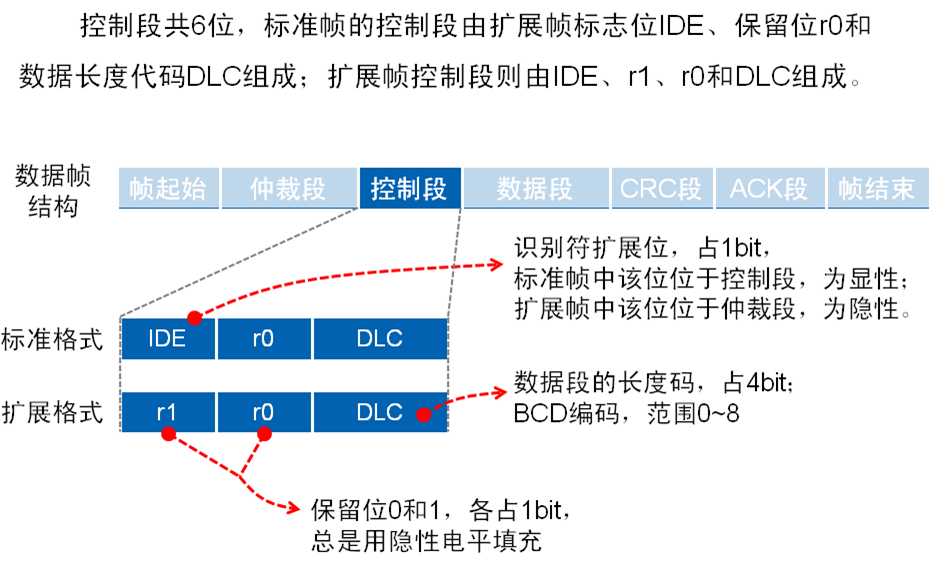
控制段
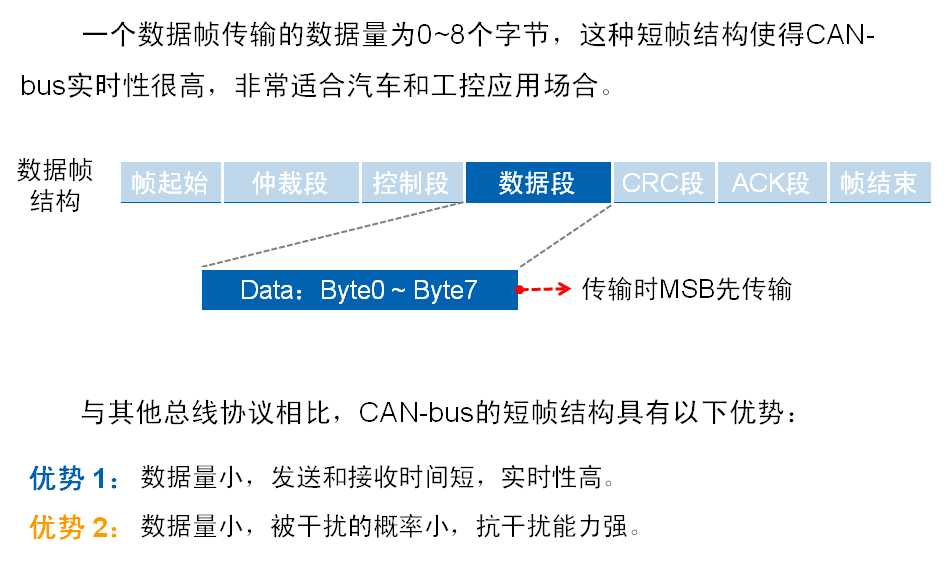
数据段
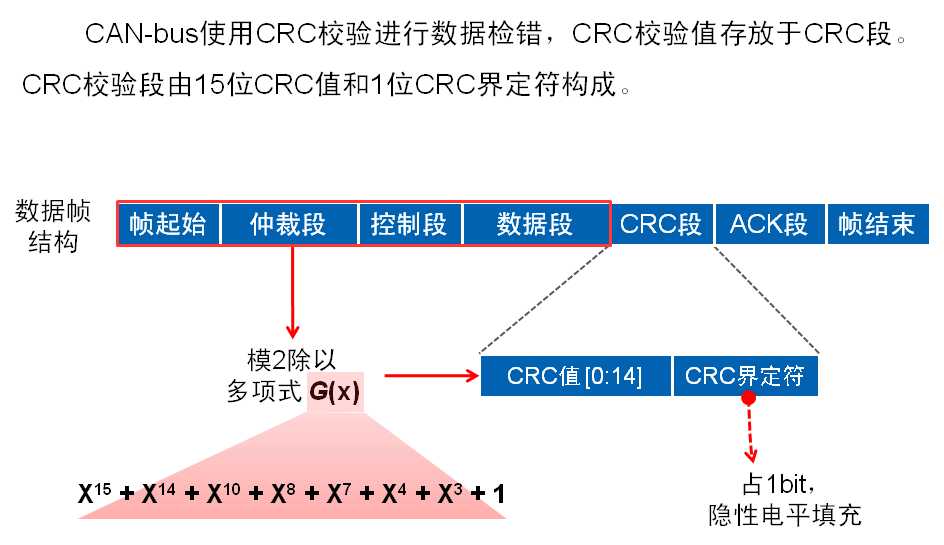
CRC段
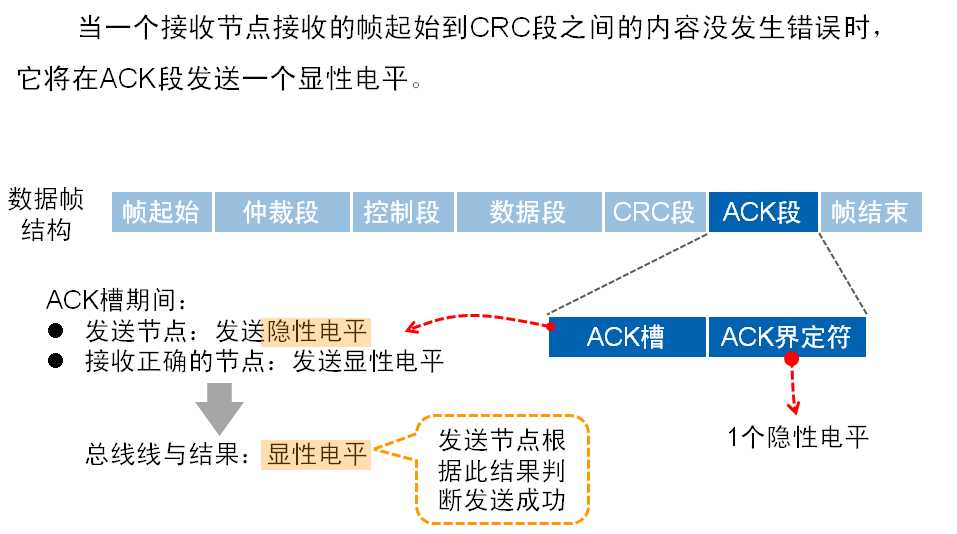
ACK段
远程帧
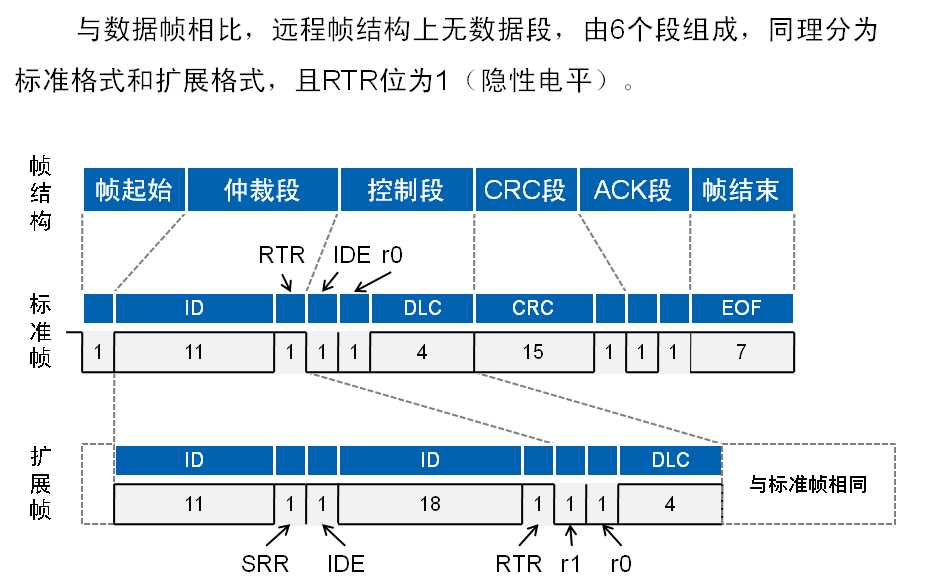
数据帧与远程帧的区别

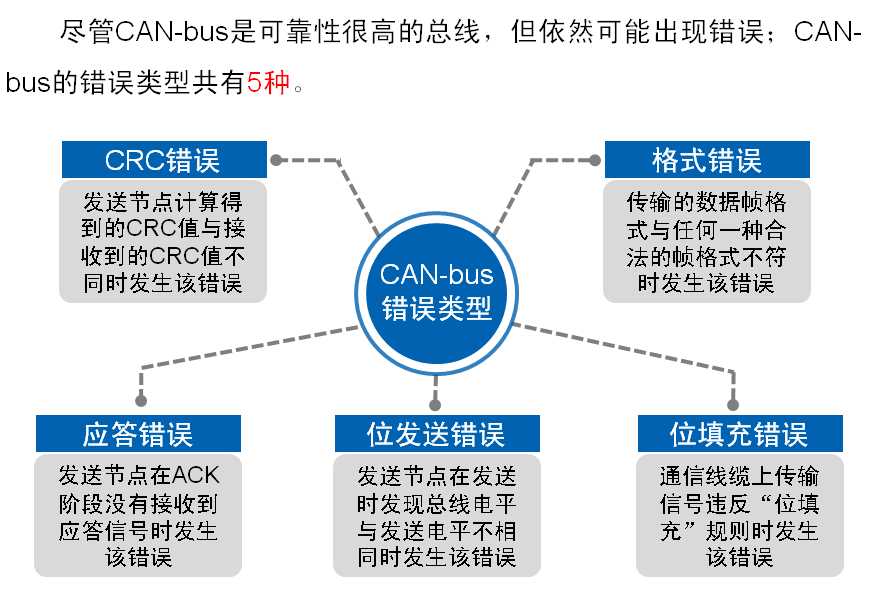
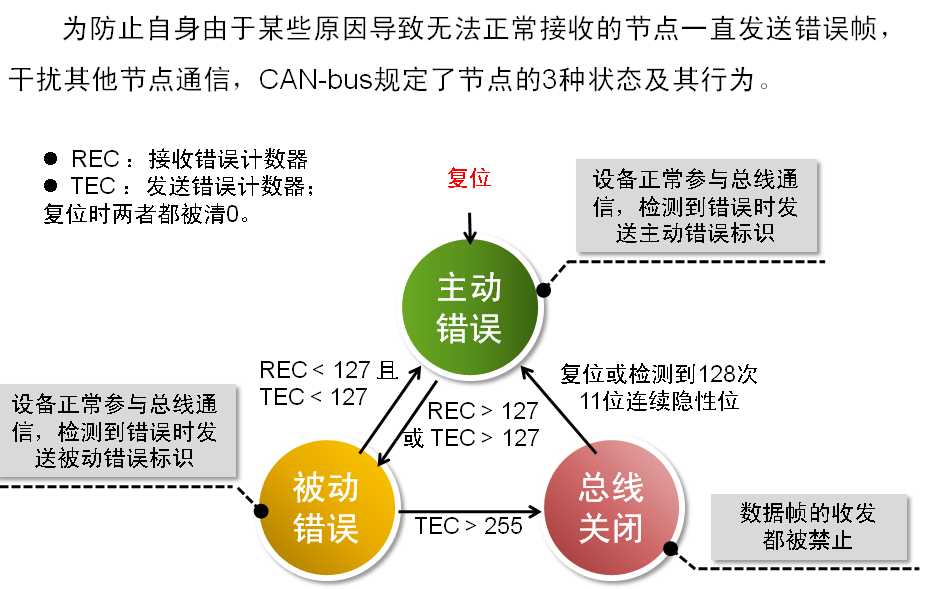
CAN-bus 错误类型
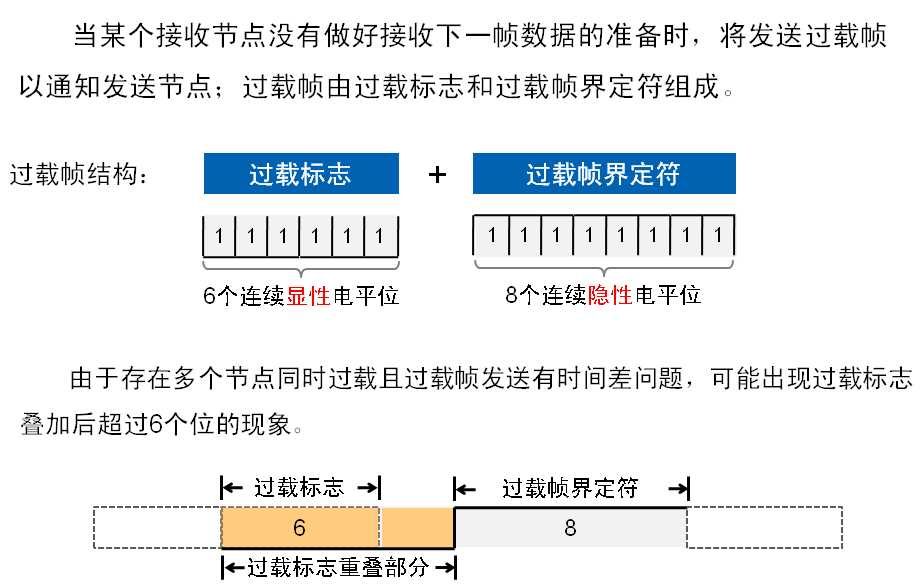
过载帧
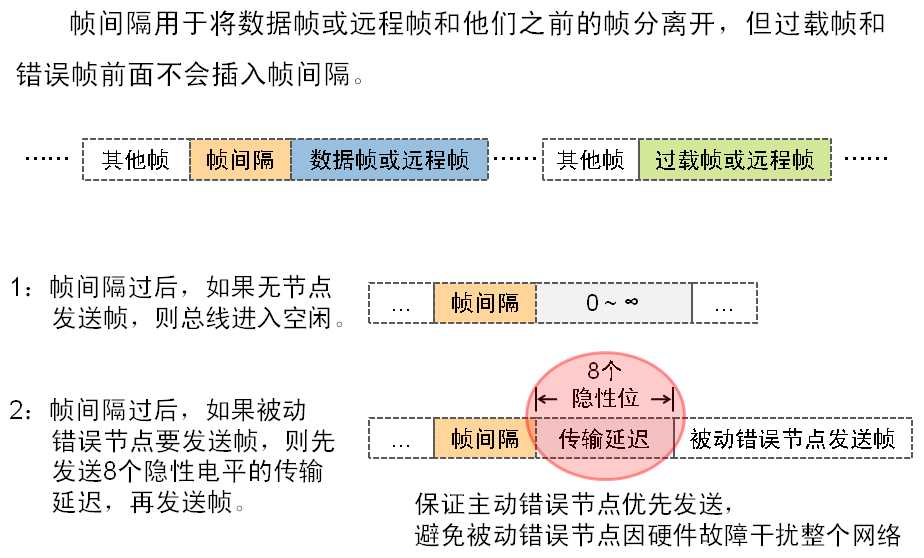
帧间隔
标签:数据信息 帧结构 net 避免 alt 单元 微处理器 ima network
原文地址:https://www.cnblogs.com/isAndyWu/p/9523016.html