标签:人性 两种 init 眼镜 ane 结果 src 示例 参考文献
单目标定:从理论到OpenCV实践
优点:简单好用。
缺点:真实的针孔由于不能为快速曝光收集足够的光线,因此不是得到图像的好方法。
描述:芯片是正方形,芯片中心在光轴上。
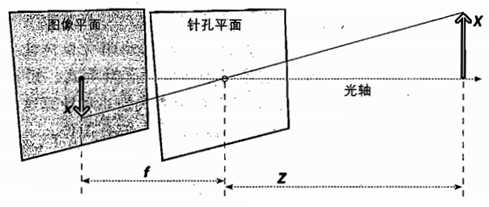

f:摄像机焦距
Z:摄像机到物体的距离
X:物理物体长度
x:图像上的物体长度
描述:芯片是矩形(长宽不同),芯片中心不在光轴上。
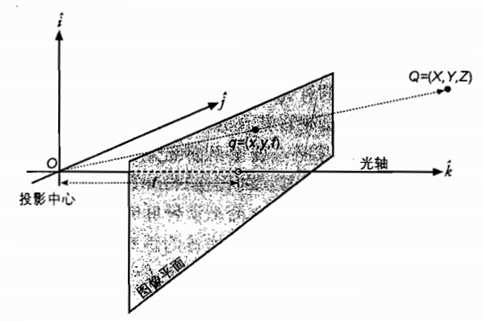
实际上,芯片的中心通常不在光轴上,因此引入新的参数cx和cy;
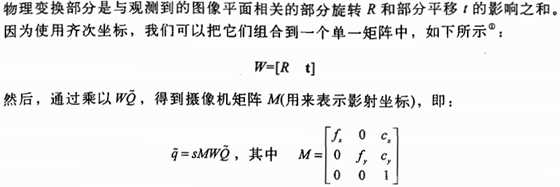
物理世界中的点Q(X,Y,Z),以某些偏移的方式投影为点(x_srceen,y_srceen):


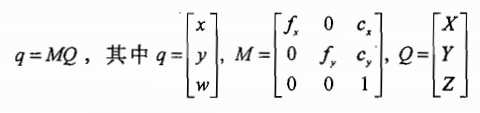
【重要概念】
定义摄像机的参数(fx,fy,cx,cy)重新排列为3X3的矩阵,称为摄像机内参数矩阵。


优点:利用透镜收集更多的光线;
缺点:背离了针 孔几何模型,而且引入透镜的畸变。
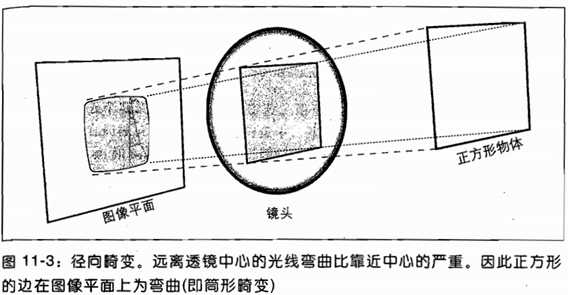
畸变产生原因:理论上讲是可能定义一种透镜而不引入任何畸变的,然后现实世界没有完美的透镜。这主要是制造上的原因,因为制作一个"球形"透镜比制作一个数学上理想的透镜更容易。而且从机械方面也很难把透镜和成像仪保持平行。
两种主要的畸变:径向畸变和切向畸变。
【重要概念】
径向畸变:来自于透镜形状;

【重要概念】
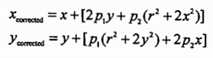
切向畸变:来自于整个摄像机的组装过程。


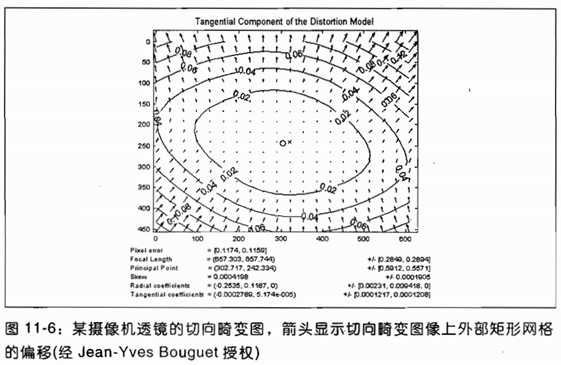

【重要概念】




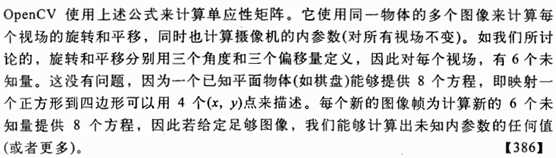
摄像机参数:一般一共15个相关参数:
(1)外参数6个:旋转3个参数;平移3个参数;
(2)内参数4个:fx,fy,cx,cy;
求解上述10个参数的前提是先假设每次的畸变参数为0;
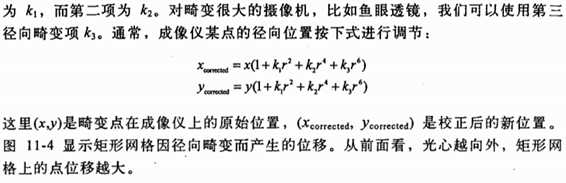
(3)5个畸变参数:k1,k2,k3,p1,p2;
其中(2)和(3)都为摄像机内参数,其中k3在普通镜头不使用,鱼眼镜头要使用。
矫正因使用透镜而给针 孔模型带来的主要偏差。
标定的过程既给出摄像机几何模型、也给出透镜的畸变模型,即求解上述的15个相关参数。

【重要概念】
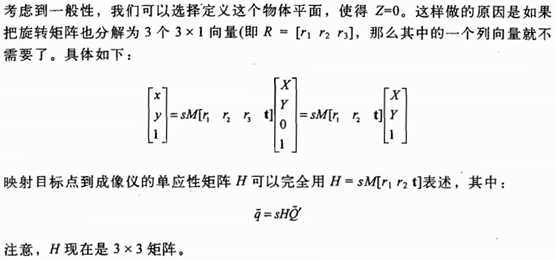
单应性矩阵主要解决外参数和内参数矩阵,且假设畸变参数为0。
在计算机视觉中,平面的单应性被定义为从一个平面到另一个平面的投影映射。

(1)标准
一个标准象棋棋盘,格子为7X7。
(2)非标准


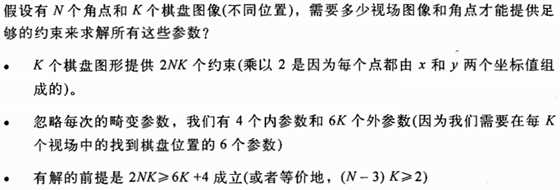
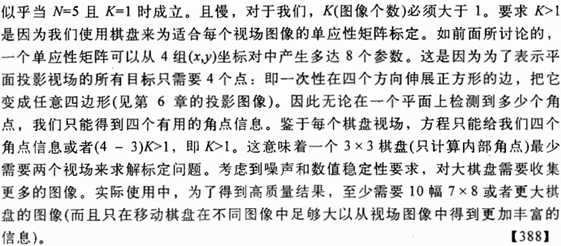
(3)最小要求
最少需要4个点(3X3的棋盘点)

(4)格子多的好处

5.4.1 摄像机标定的理论方法简介
(1)传统标定法
传统标定技术在定标的时候,需要在摄像机前放置一个特定的标定物,并认为地提供一组已知坐标的特征基元,摄像机通过寻找标定物上这些已知的特征基元来实现定标。它用到了很多射影几何方面的理论,是一种直接计算摄像机模型的方法。
(2)自标定法
自标定技术则更为灵活,它不需要特定的参照物来实现定标,是一种对环境具有很强适应性的定标技术,也是目前研究的热点。它利用环境的刚体性,通过对比多幅图像中的对应点来计算摄像机模型,但就目前的研究来看,其定标精度还无法与传统定标技术相比。
(3)张正友标定法

(1)精简版8页《Flexible Camera Calibration by Viewing a Plane from Unknown Orientations》- Zhang1999
网址:http://www.vision.caltech.edu/bouguetj/calib_doc/papers/zhan99.pdf
(2)完整版22页《A Flexible New Technique for Camera Calibration.rar》- Zhang2000
网址:http://research.microsoft.com/~zhang/Papers/TR98-71.pdf
(3)张正友主页:
网址:http://research.microsoft.com/en-us/um/people/zhang/
(3)张正友主页中的相机标定页:
网址:http://research.microsoft.com/en-us/um/people/zhang/Calib/
网址:http://www.ifp.uni-stuttgart.de/lehre/vorlesungen/Aero/Brown71.pdf
利用棋盘标定的结果可进行畸变矫正。
(1)查找棋盘角点:cvFindChessboardCorners;
(2)亚像素角点:cvFindCornerSubPix;
(3)显示角点结果:cvDrawChessboardCorners;
(4)单目标定:
[A]方式一:获取摄像机内外参数:cvCalibrateCamera2(内部包含
cvFindExtrinsicCameraParams2);
[B]方式二:根据摄像机内参数求取外参数:cvFindExtrinsicCameraParams2
注意:上述两种方式输出的是旋转向量和平移向量,如果需要转换为矩阵使用函数cvRodrigues2,该函数可以将向量和矩阵进行互转。
(5)图像畸变矫正:
[A]单目图像畸变矫正方式一(效率低):cvUndistort2;
[B]单目图像畸变矫正方式二(效率高):cvInitUndistortMap+cvRemap;
[C]双目点畸变矫正:cvUndistortPoints(注意:输入输出为点坐标,只能在双目标定中使用)。
(6)统计单目标定误差(计算3D点在图像上的投影坐标与棋盘点坐标的差值):
cvProjectPoints2+cvNorm。
注意:cvProjectPoints2输入的是旋转向量和平移向量。
(1)函数原型
void cvCalibrateCamera2(const CvMat* object_points,
const CvMat* image_points,
const CvMat* point_counts,
CvSize image_size,
CvMat* intrinsic_matrix,//[output]
CvMat* distortion_coeffs,//[output]
CvMat* rotation_vectors=NULL,//[output]
CvMat* translation_vectors=NULL,//[output]
int flags=0
);
(2)参数注释(9个)
定标点的世界坐标,为3xN或者Nx3的矩阵,这里N是所有视图中点的总数。
http://www.360doc.com/content/14/0410/14/10724725_367762917.shtml
定标点的图像坐标,为2xN或者Nx2的矩阵,这里N是所有视图中点的总数。
向量,指定不同视图里点的数目,1xM或者Mx1向量,M是视图数目。
图像大小,只用在初始化内参数时。
输出内参矩阵(A) ,如果指定
CV_CALIB_USE_INTRINSIC_GUESS和(或)CV_CALIB_FIX_ASPECT_RATION,fx、 fy、 cx和cy部分或者全部必须被初始化。
输出大小为4x1或者1x4的向量,里面为形变参数[k1, k2, p1, p2]。
输出大小为3xM或者Mx3的矩阵,里面为旋转向量(旋转矩阵的紧凑表示方式,具体参考函数cvRodrigues2)
输出大小为3xM或Mx3的矩阵,里面为平移向量。
不同的标志,可以是0(默认),或者下面值的组合:
(3)单目定标函数cvCalibrateCamera2采用怎样的 flags 比较合适?(来自[文献4])
由于一般镜头只需要计算k1,k2,p1,p2四个参数,所以我们首先要设置 CV_CALIB_FIX_K3;其次,如果所用的摄像头不是高端的、切向畸变系数非常少的,则不要设置 CV_CALIB_ZERO_TANGENT_DIST,否则单目校正误差会很大;如果事先知道摄像头内参的大概数值,并且cvCalibrateCamera2函数的第五个参数intrinsic_matrix非空,则也可设置 CV_CALIB_USE_INTRINSIC_GUESS ,以输入的intrinsic_matrix为初始估计值来加快内参的计算;其它的 flag 一般都不需要设置,对单目定标的影响不大。
(1)函数原型
void cvFindExtrinsicCameraParams2( const CvMat* object_points,
const CvMat* image_points,
const CvMat* intrinsic_matrix,
const CvMat* distortion_coeffs,
CvMat* rotation_vector,//[output]
CvMat* translation_vector//[output]
);
(2)参数注释(6个)
定标点的坐标,为3xN或者Nx3的矩阵,这里N是视图中的个数。
定标点在图像内的坐标,为2xN或者Nx2的矩阵,这里N是视图中的个数。
内参矩阵(A) 。
大小为4x1或者1x4的向量,里面为形变参数[k1,k2,p1,p2]。如果是NULL,所有的形变系数都为0。
输出大小为3x1或者1x3的矩阵,里面为旋转向量(旋转矩阵的紧凑表示方式,具体参考函数cvRodrigues2)。
大小为3x1或1x3的矩阵,里面为平移向量。
http://blog.sina.com.cn/s/blog_73ef08a80100vi49.html
(1)问题(来自[文献3]):OpenCV中用cvCalibrateCamera2 进行相机标定的精度差,标定结果不稳定。
分析:可能原因有:
A.夹角太小会导致误差较大
可能是在标定的时候标定板所在平面与成像平面(image plane)之间的夹角太小,张正友论文里的仿真数据(有噪声的数据)说明当两者夹角太小误差会很大,从张正友的论文里给出的5幅图中(http://research.microsoft.com/~zhang/Calib/),其中标定平面与成像平面的夹角分别为:8.8947、11.2325、24.4875、10.8535、9.5829(单位:度)。而且张正友的论文中也提到两幅标定板之间的位置平行放置的话,相关相当于一幅,因此在实际标定中平行放置的情况最好避免,可能有时你无形之中就犯了这个错误。
B.标定时拍摄的图片太少
虽然张正友的论文里只用了5幅图片,但是建议用10来幅左右还是必要的,因为我们实际中可能标定板用A4的纸打印出来贴在一块板上的,标定板上的世界坐标精度就不是特别高,多拍摄几幅图像能减少这方面带来的误差,而且多个角度拍摄也可能解决了问题一:标定板和成像平面夹角小的问题。
有个例子是用20幅图片进行标定的:
http://www.vision.caltech.edu/bouguetj/calib_doc/htmls/example.html
C.图像上角点提取的不准确
用cvFindChessboardCorners函数找角点不是很好,假如拍到的图像不是完整的棋盘格的时候肯定会有问题的,而且也不少人反应用这个函数提取不出角点,建议可以用其他工具 比如:
OpenCV and MatLab Camera Calibration Toolboxes Enhancement:
http://graphics.cs.msu.ru/en/research/calibration/
Camera Calibration Toolbox for Matlab(强烈推荐):
http://www.vision.caltech.edu/bouguetj/calib_doc/htmls/example.html
(2)建议用其他标定方法(比如Tsai)或其他标定工具进行对比
强烈推荐 用这个matlab标定工具箱来进行标定,可以和OpenCV做对比,它也是基于张正友的平面标定方法的,做得非常人性化,有误差分析、标定结果三维重建、重投影计算角点等功能 。
Camera Calibration Toolbox for Matlab:
http://www.vision.caltech.edu/bouguetj/calib_doc/
(3)使用OpenCV进行摄像机定标虽然方便,但是定标结果往往不够准确和稳定,最好是使用 Matlab标定工具箱 来进行定标,再将定标结果取回来用于立体匹配和视差计算。
http://blog.csdn.net/zhazhiqiang/article/details/50593677
http://blog.csdn.net/zhazhiqiang/article/details/50593730
标签:人性 两种 init 眼镜 ane 结果 src 示例 参考文献
原文地址:https://www.cnblogs.com/zhazhiqiang2018/p/9537663.html