标签:图形化界面 打开 参数 nod run 界面 分享 bubuko code
ROS图形化界面能够让我们快速开发ROS,也有利于我们观测数据。
下面介绍一下利用图形化界面控制小乌龟按照指令行进和查看小乌龟的行进参数。
首先我们需要做一些准备工作:
$ roscore$ rosrun turtlesim turtlesim_node$ rosrun turtlesim turtle_teleop_key1.图形化界面控制小乌龟行进
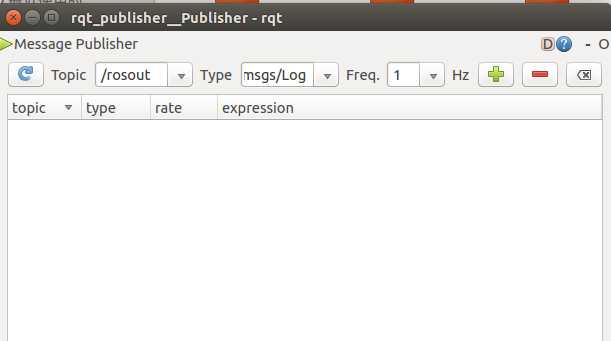
(1)新打开一个terminal,输入如下命令打开publisher 图形化界面
rosrun rqt_publisher rqt_pulisher
出现如下界面
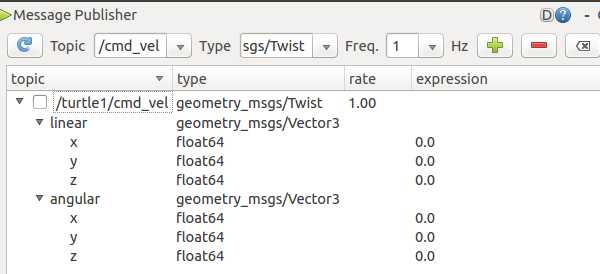
(2)topic选择/cmd_vel 点击加号,如下图所示:
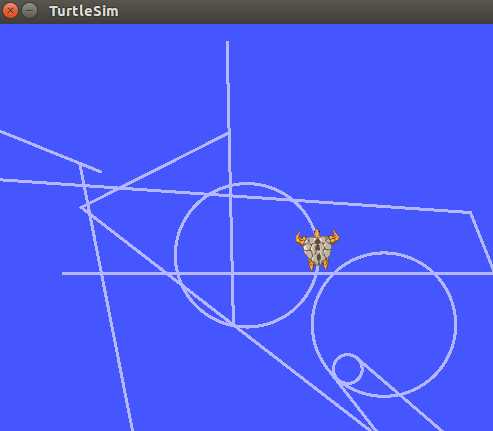
(3)修改linear 和angular 中的值控制小乌龟行走。在选择框中打勾,表示没一秒发送一次指令。
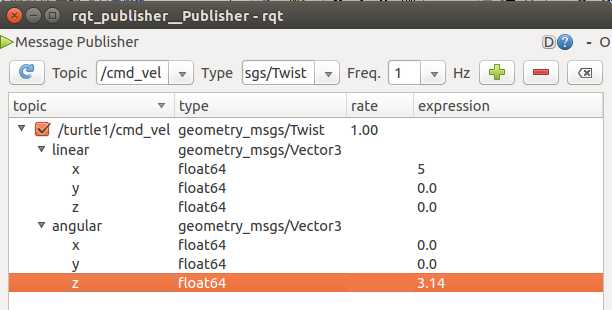
小乌龟就出现画圆状态。
2.查看小乌龟运行参数
(1)新开一个terminal,输入如下指令,打开topic
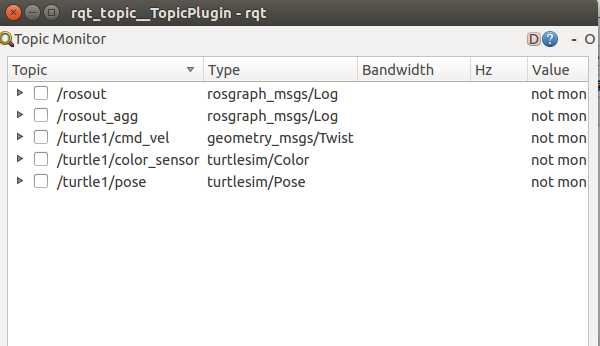
rosrun rqt_topic rqt_topic
出现如下图图形化界面
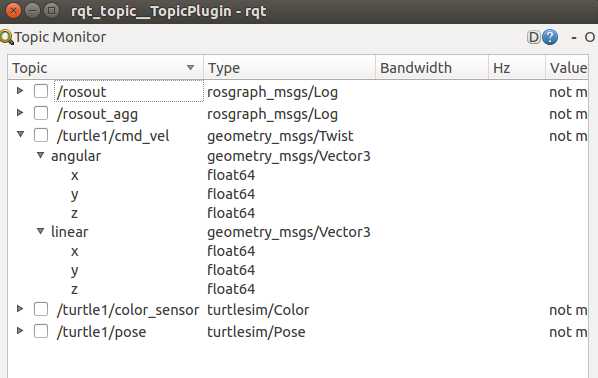
(2)下拉/turtle1/cmd_vel出现如下界面
(3)通过小乌龟键盘控制terminal 方向健控制小乌龟行进,在topic 界面中观察linear和angular中值的变化。
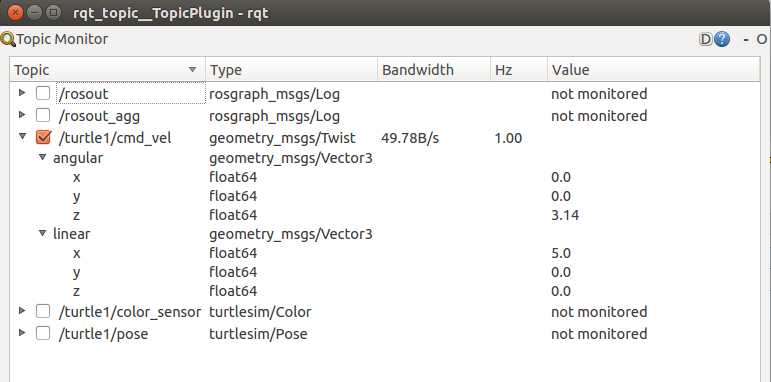
也可以在publisher界面中设置参数控制小乌龟行走,在topic 中观测。
标签:图形化界面 打开 参数 nod run 界面 分享 bubuko code
原文地址:https://www.cnblogs.com/fuhang/p/9552481.html