标签:含义 weak 两种 ret github points yml form desire
与版本2.4相比,OpenCV 3.0引入了许多新算法和功能。有些模块已被重写,有些已经重组。尽管2.4中的大多数算法仍然存在,但接口可能不同。本节描述了一般性的最显着变化,过渡操作的所有细节和示例都在本文档的下一部分中。
https://github.com/opencv/opencv_contrib
这是一个适用于所有新算法,实验算法和非免费算法的地方。与主存储库相比,它没有得到支持团队的太多关注,但社区努力使其保持良好状态。(即OpenCV的附加库,人脸识别等一些附加的功能可能需要用到这个库)
要使用contrib存储库构建OpenCV ,请将以下选项添加到cmake命令:
-DOPENCV_EXTRA_MODULES_PATH=<path-to-opencv_contrib>/modules
或者参考我的博客为opencv添加contrib库。
在2.4中,所有头文件都位于相应的模块子文件夹(opencv2 / <module> / <module> .hpp)中,在3.0中有顶级模块头文件,其中包含大部分模块功能:opencv2 / <module> .hpp和所有 C语言风格的API定义已移至单独的标头(例如opencv2 / core / core_c.h)。
通用算法使用模式已更改:现在必须在包装在智能指针cv :: Ptr中的堆上创建。版本2.4允许直接或通过智能指针进行堆栈和堆分配。
已经从cv :: Algorithm类中删除了get和set方法以及CV_INIT_ALGORITHM宏。在3.0中,所有属性都已转换为getProperty / setProperty纯虚拟方法对。因此,它是不是能够创建和使用CV ::算法通过名称实例(使用通用的算法::创建(字符串)方法),应该显式调用相应的函数方法。
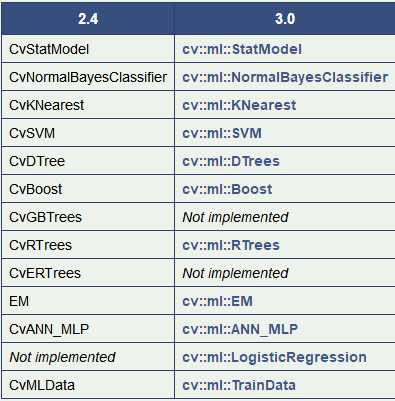
由于此模块已被重写,因此需要花费一些精力才能使您的软件适应它。所有算法都与其基类StatModel一起位于单独的ml命名空间中。单独的SomeAlgoParams类已被一组相应的getProperty / setProperty方法替换。
下表说明了2.4和3.0机器学习类之间的对应关系。
尽管3.0中重写的ml算法允许您从xml / yml文件加载旧的训练模型,但预测过程中的偏差是可能的。
points_classifier.cpp示例中的以下代码片段说明了模型培训过程中的差异:
using namespace cv;
// ======== version 2.4 ========
Mat trainSamples, trainClasses;
prepare_train_data( trainSamples, trainClasses );
CvBoost boost;
Mat var_types( 1, trainSamples.cols + 1, CV_8UC1, Scalar(CV_VAR_ORDERED) );
var_types.at<uchar>( trainSamples.cols ) = CV_VAR_CATEGORICAL;
CvBoostParams params( CvBoost::DISCRETE, // boost_type
100, // weak_count
0.95, // weight_trim_rate
2, // max_depth
false, //use_surrogates
0 // priors
);
boost.train( trainSamples, CV_ROW_SAMPLE, trainClasses, Mat(), Mat(), var_types, Mat(), params );
// ======== version 3.0 ========
Ptr<Boost> boost = Boost::create();
boost->setBoostType(Boost::DISCRETE);
boost->setWeakCount(100);
boost->setWeightTrimRate(0.95);
boost->setMaxDepth(2);
boost->setUseSurrogates(false);
boost->setPriors(Mat());
boost->train(prepare_train_data()); // ‘prepare_train_data‘ returns an instance of ml::TrainData class
一些算法(FREAK,BRIEF,SIFT,SURF)已移至opencv_contrib存储库,xfeatures2d模块,xfeatures2d命名空间。它们的接口也已更改(从cv::Feature2D基类继承)。
xfeatures2d模块类列表:
需要以下步骤:
opencv2/xfeatures2d.h标题xfeatures2doperator()呼叫detect,compute或者detectAndCompute如果需要有些类现在使用通用方法detect,compute或者detectAndCompute由Feature2D基类而不是自定义提供operator()
以下代码片段说明了差异(来自video_homography.cpp示例):
using namespace cv; // ====== 2.4 ======= #include "opencv2/features2d/features2d.hpp" BriefDescriptorExtractor brief(32); GridAdaptedFeatureDetector detector(new FastFeatureDetector(10, true), DESIRED_FTRS, 4, 4); // ... detector.detect(gray, query_kpts); //Find interest points brief.compute(gray, query_kpts, query_desc); //Compute brief descriptors at each keypoint location // ====== 3.0 ======= #include "opencv2/features2d.hpp" #include "opencv2/xfeatures2d.hpp" using namespace cv::xfeatures2d; Ptr<BriefDescriptorExtractor> brief = BriefDescriptorExtractor::create(32); Ptr<FastFeatureDetector> detector = FastFeatureDetector::create(10, true); // ... detector->detect(gray, query_kpts); //Find interest points brief->compute(gray, query_kpts, query_desc); //Compute brief descriptors at each keypoint location
所有专门的ocl实现都隐藏在通用C ++算法接口之后。现在可以在运行时动态选择函数执行路径:CPU或OpenCL; 这种机制也称为“透明API”。
新类cv :: UMat旨在以方便的方式隐藏与OpenCL设备的数据交换。
以下示例说明了API修改(来自OpenCV站点):
// initialization
VideoCapture vcap(...);
ocl::OclCascadeClassifier fd("haar_ff.xml");
ocl::oclMat frame, frameGray;
Mat frameCpu;
vector<Rect> faces;
for(;;){
// processing loop
vcap >> frameCpu;
frame = frameCpu;
ocl::cvtColor(frame, frameGray, BGR2GRAY);
ocl::equalizeHist(frameGray, frameGray);
fd.detectMultiScale(frameGray, faces, ...);
// draw rectangles …
// show image …
}
// initialization
VideoCapture vcap(...);
CascadeClassifier fd("haar_ff.xml");
UMat frame, frameGray; // the only change from plain CPU version
vector<Rect> faces;
for(;;){
// processing loop
vcap >> frame;
cvtColor(frame, frameGray, BGR2GRAY);
equalizeHist(frameGray, frameGray);
fd.detectMultiScale(frameGray, faces, ...);
// draw rectangles …
// show image …
}
cuda模块已分成几个小块:
gpu命名空间已被删除,请改用cv :: cuda命名空间。许多类也已重命名,例如:
gpu::FAST_GPU- > cv :: cuda :: FastFeatureDetectorgpu::createBoxFilter_GPU- > cv :: cuda :: createBoxFilter文档已转换为Doxygen格式。您可以在OpenCV参考文档的教程部分(OpenCV的编写文档)中找到更新的文档编写指南。
在某些情况下,可以支持两种版本的OpenCV。
要检查应用程序源代码中的库主要版本,应使用以下方法:
#include "opencv2/core/version.hpp" #if CV_MAJOR_VERSION == 2 // do opencv 2 code #elif CV_MAJOR_VERSION == 3 // do opencv 3 code #endif
注意不要使用CV_VERSION_MAJOR,它对2.4和3.x分支有不同的含义!
通过检查编译系统中的库版本,可以链接不同的模块或启用/禁用应用程序中的某些功能。标准的cmake或pkg-config变量可用于此:
OpenCV_VERSION 对于cmake,将包含完整版本:例如“2.4.11”或“3.0.0”OpenCV_VERSION_MAJOR 对于cmake,将仅包含主要版本号:2或3Version例:
if(OpenCV_VERSION VERSION_LESS "3.0") # use 2.4 modules else() # use 3.x modules endif()
标签:含义 weak 两种 ret github points yml form desire
原文地址:https://www.cnblogs.com/noticeable/p/9612846.html