标签:图片 程序 效果 span 比例 说明 影响 程序实现 inf
PID参数整定教程
1.数字PID控制算法介绍------位置型&增量型
由于是面向计算机编程实现为目的,这里就直接从数字PID切入正题,如果想要了解更多PID方面的基本知识请参阅相关理论资料。
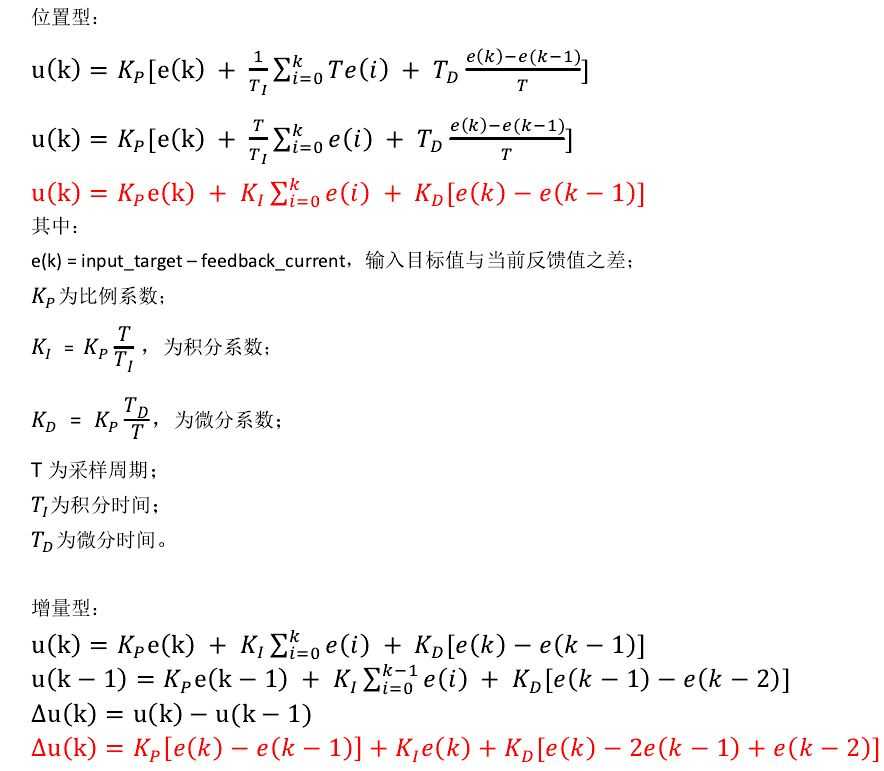
增量型算法的优点:
a. 增量算法不需要做累加,控制量增量的确定仅与最近几次误差采样值有关,计算误差或计算精度问题,对控制量的计算影响较小。而位置算法要用到过去的误差的累加值,容易产生大的累加误差。
b. 增量式算法得出的是控制量的增量,例如阀门控制中、只输出阀门开度的变化部分,误动作影响小,必要时通过逻辑判断限制或禁止本次输出,不会严重影响系统的工作。而位置算法的输出是控制量的全量输出,误动作影响大。
c. 采用增量算法,易于实现手动到自动的无冲击切换。
d. 利用增量算法,也很容易得出位置算法u(k)= u(k-1)+△u(k)
2.PID参数整定过程分析
定性分析:
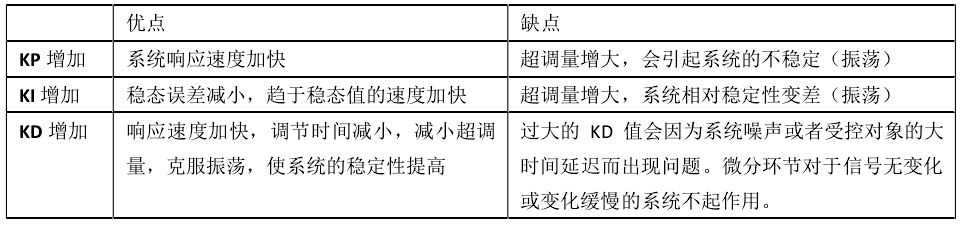
增量式PID参数的特殊说明:

位置型PID的参数整定过程一般是,先整定KP,然后整定KI,最后整定KD;对比位置型PID与增量型PID的数学表达式,可以发现位置型KP和增量型KI一样,位置型KI和增量型KD一样,位置型KD和增量型KP一样。这样,增量型PID应该先整定KI,然后整定KD,最后整定KP。
试凑法整定步骤:
为了表述方便,以下内容以广义PID的KP、KI、KD来表述。
第1步:
首先只整定比例部分。比例系数KP由小变大,观察相应的系统响应,直到得到反应快,超调小的响应曲线。系统若无静差或静差已小到允许范围内,并且响应效果良好,那么只须用比例调节器即可。
第2步:
若稳态误差不能满足设计要求,则需加入积分控制。整定时先置KI为较小值,并将经第1步整定得到的KP减小些( 如缩小为原值的0.8倍 ),然后增大KI,并使系统在保持良好动态响应的情况下,消除稳态误差。这种调整可根据响应曲线的状态,反复改变KP及KI,以期得到满意的控制过程。
第3步:
若使用PI调节器消除了稳态误差,但动态过程仍不能满意,则可加入微分环节。在第2步整定的基础上,逐步增大KD,同时相应地改变KP和KI,逐步试凑以获得满意的调节效果。
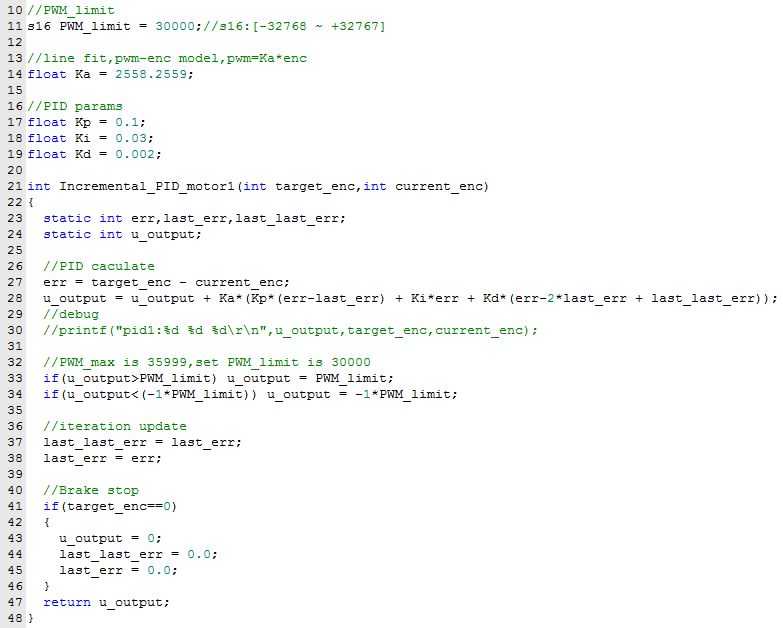
3.增量型PID程序实现实例
标签:图片 程序 效果 span 比例 说明 影响 程序实现 inf
原文地址:https://www.cnblogs.com/hiram-zhang/p/9621120.html