标签:有一个 构建 旋转 矩阵乘法 多个 简单的 就是 连接 info
连接矩阵的优点是可以使用这些矩阵单独操作. 多个变换依然是一个矩阵. 连接矩阵不可交换,因为矩阵乘法不具有交换性.
X3=RX2 X2=SX1
X3=R(SX1)=(RS)X1
X3≠SRX1
逆变换:
方法1 求相乘结果的逆矩阵
方法2 求每个变换的逆矩阵,同时交换位置
也就是最后一个变换必须最先解除
M=M1M2M3
M-1=,M3-1M2-1M1-1
回顾二维矩阵
旋转矩阵是正交的 即R^TR=E
三维空间
二维旋转可以看成围绕Z轴的特殊旋转,因为Z轴保持不变
因此矩阵可看成
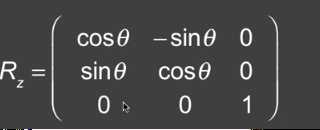
X坐标和Y坐标和二维一样。
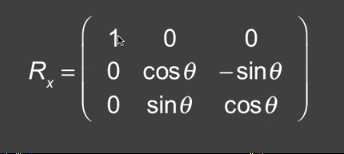
相似的,关于X轴的旋转,矩阵如下:
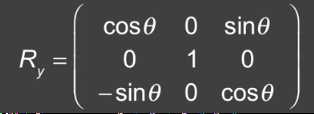
同理得关于Y轴矩阵
因为Y等于Z叉乘X,矩阵稍有不同
所有这些矩阵都是正交的
我们可以把矩阵的每一行当作一个单位向量
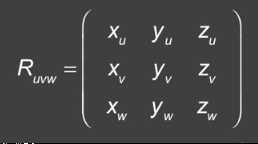
u=xuX+yuY+zuZ
v=xvX+yvY+zvZ
w=xwX+ywY+zwZ
向量u是新坐标系的坐标轴
由此可推导出,当给定了3个正交向量,正交就意味着
互相点成为0,并且u v w 都是单位向量
所以,给定任意的这样三个向量,就可以确定标准的XYZ坐标系下的一个旋转。
通过这些向量我们可以构建一个旋转矩阵。
还有一种方式,就是旋转矩阵乘以点的形式
把点P映射到了新的坐标系中。
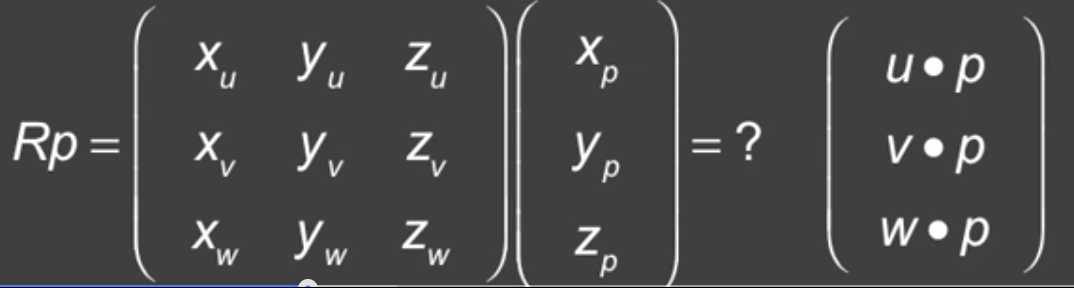
这是一个非常简单的三维旋转的解释。
你有一个新的坐标系,接着你在这个坐标系下得到P的点积。
CS184.1X 计算机图形学导论L3V2和L3V3(部分)
标签:有一个 构建 旋转 矩阵乘法 多个 简单的 就是 连接 info
原文地址:https://www.cnblogs.com/cnblog-wuran/p/9643760.html