标签:作用 固定 状态 相关 过拟合 规划 http 现在 分享图片
原则一:评估方法驱动研究进展
David Silver 指出,客观、量化的评估方法是强化学习进展的重要驱动力:
评估指标的选择决定了研究进展的方向;
这可以说是强化学习项目中最重要的一个决定。
David Silver 介绍了两种评估方法:
排行榜驱动的研究
确保评估指标紧密对应最终目标;
避免主观评估(如人类评估)。
假设驱动的研究
形成一个假设:
Double-Q 学习优于 Q 学习,因为前者减少了向上偏误(upward bias);
在宽泛的条件下验证该假设;
对比同类方法,而不是只与当前最优方法进行对比;
寻求理解,而不是排行榜表现。
原则二:可扩展性是成功的关键
David Silver 认为可扩展性是强化学习研究成功的关键。
算法的可扩展性指与资源相关的算法的性能变化;
资源包括计算量、内存或数据;
算法的可扩展性最终决定算法成功与否;
可扩展性比研究的起点更加重要;
优秀的算法在给定有限资源的条件下是最优的。
原则三:通用性(Generality)支持算法的长远有效性
算法的通用性指它在不同强化学习环境中的性能。研究者在训练时要避免在当前任务上的过拟合,并寻求可以泛化至未来未知环境的算法。
我们无法预测未来,但是未来任务的复杂度可能至少和当前任务持平;在当前任务上遇到的困难在未来则很有可能增加。
因此,要想使算法可以泛化至未来的不同强化学习环境,研究者必须在多样化且真实的强化学习环境集合上测试算法。
原则四:信任智能体的经验
David Silver 指出经验(观察、动作和奖励)是强化学习的数据,公式可以写作:
h_t=o_1,r_1,a_2,o_2,r_2,...,a_t,o_t,r_t
经验流随智能体在环境中学习时间的延长而累积。
他告诫我们,要把智能体的经验作为知识的唯一来源。人们在智能体学习遇到问题时倾向于添加人类的专业知识(人类数据、特征、启发式方法、约束、抽象、域操控)。
他认为,完全从经验中学习看起来似乎不可能。也就是说,强化学习的核心问题非常棘手。但这是 AI 的核心问题,也值得我们付出努力。从长远来看,从经验中学习一直是正确的选择。
原则五:状态是主观的
David Silver 指出:
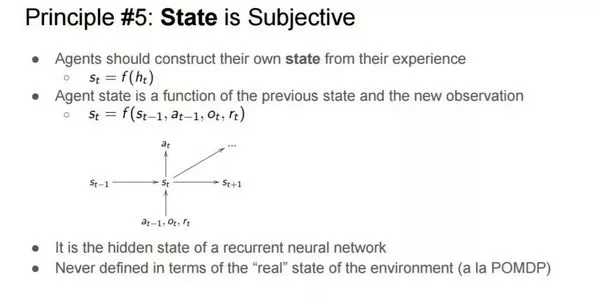
智能体应该从它们的经验中构建属于自己的状态,即:s_t=f(h_t)
智能体状态是前一个状态和新观察的函数:s_t=f(s_t-1,a_t-1,o_t,r_t)
如下图所示:
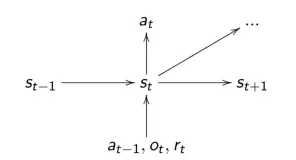
它是循环神经网络的隐藏状态。
永远不要根据环境的「真实」状态来定义状态(智能体应该是一个部分可观察马尔可夫链模型)。
原则六:控制数据流
智能体存在于丰富的感觉运动(sensorimotor)数据流中:
观测结果的数据流输入到智能体中;
智能体输出动作流。
智能体的动作会影响数据流:
特征控制 => 数据流控制
数据流控制 => 控制未来
控制未来 => 可以最大化任意奖励
原则七:用价值函数对环境建模
David Silver 首先给出了使用价值函数的三个原因:
高效地对未来进行总结/缓存;
将规划过程简化为固定时间的查找,而不是进行指数时间量级的预测;
独立于时间步跨度进行计算和学习。
他指出,学习多个价值函数可以高效地建模环境的多个方面(控制状态流),包括随后的状态变量;还能在多个时间尺度上学习。他还提醒我们避免在过于简化的时间步上建模环境。
原则八:规划:从想象的经验中学习
David Silver 提出了一种有效的规划方法,并将其分为两步。首先想象下一步会发生什么,从模型中采样状态的轨迹;然后利用我们在真实经验中用过的 RL 算法从想象的经验中学习。他提醒我们从现在开始关注价值函数逼近。
原则九:使用函数近似器
David Silver 认为,可微网络架构是一种强大的工具,可以丰富状态表示,同时使可微记忆、可微规划以及分层控制更加便利。他提出将算法复杂度引入网络架构,以减少算法复杂度(指参数的更新方式),增加架构的表达性(指参数的作用)。
原则十:学会学习
AI 史是一个进步史:
第一代:旧式的 AI
手动预测:此时的人工智能只能执行手动预测
什么也学不会
第二代:浅层学习
手动构建特征:研究人员需要耗费大量时间、精力手动构建特征
学习预测
第三代:深度学习
手动构建的算法(优化器、目标、架构……)
端到端学习特征和预测
第四代:元学习
无需手工
端到端学习算法和特征以及预测
标签:作用 固定 状态 相关 过拟合 规划 http 现在 分享图片
原文地址:https://www.cnblogs.com/BeanHsiang/p/9691470.html