标签:nts xpl sms format images personal models ping box
1. The secret of flowers is to present spring with a fragrant posture, to display her born beauty at the cost of living during each life cycle.
2. Don‘t confuse my personality with my attitude. My personality is who I am. My attitude depends on who you are.
3. It‘s time for reunions when the moon is the roundest.
4. I may not be there yet, but I‘m closer than I was yesterday.
5. As the bright moon shines over the sea. From far away you share this moment with me.
6. Do not pray for easy lives, pray to be stronger.
7. The man who attracts luck carries with him the magnet of preparation.
8. The difference between successful persons and others is that they really act.
9. However difficult life may seem, there is always something you can do and succeed at.
10. Instead of standing in a corner and being lost in silence, it‘s better to go to the stage and try to perform, leave the auditorium and be your hero.
11. Catch one‘s heart, never be apart.
12. The most beautiful people we have known are those who have known defeat, known suffering, known struggle, known loss, and have found their way out of the depths. These persons have an appreciation, a sensitivity, and an understanding of life that fills them with compassion, gentleness, and a deep loving concern. Beautiful people do not just happen.
13. You must be strong now. You must never give up. And when you are afraid of the dark, don‘t forget the light is always there.
14. Everyone comes into your life for a reason; some good, some bad. They shape us and break us, but in the end, make us who we are.
15. There are anger, jealousy, happiness, sadness, pain, hatred, love and all kinds of emotions in the world, but I only like to keep the two kinds of love and sadness.
16. Don‘t give up your little thought, because one day it may grow into a big tree.
17. All life in nature is precious and equal. Love the whole nature and you will get a lot of invisible power.
18. Every day we have plenty of opportunities to get angry, stressed or offended. But what you‘re doing when you indulge these negative emotions is giving something outside yourself power over your happiness. You can choose to not let little things upset you.

computer vision:16-385 Computer Vision, Spring 2018
(http://www.cs.cmu.edu/~16385/)
This course provides an introduction to computer vision, including fundamentals of image formation, camera imaging geometry, feature detection, and matching, stereo, motion estimation, and tracking, image classification, scene understanding, and deep learning with neural networks. We will develop basic methods for applications that include finding known models in images, depth recovery from the stereo, camera calibration, image stabilization, automated alignment, tracking, boundary detection, and recognition. We will develop the intuitions and mathematics of the methods in a class, and then learn about the difference between theory and practice in projects.
This course is based upon James Hays‘ computer vision course, previously taught at Brown as CS143, and currently taught at Georgia Tech as CS 4476. Significant thanks to him and his staff, across the years, for all their hard work.
No prior experience with computer vision is assumed, although previous knowledge of visual computing or signal processing will be helpful (e.g., CSCI 1230). The following skills are necessary for this class:
Robotics System Toolbox Code Examples
(https://ww2.mathworks.cn/products/robotics/code-examples.html)
(https://ww2.mathworks.cn/help/robotics/examples/access-the-tf-transformation-tree-in-ros.html)
(https://ww2.mathworks.cn/help/robotics/examples/access-the-ros-parameter-server.html)
This example explores how to add and retrieve parameters on the ROS parameter server. The parameter server usually runs on the same device that launches the ROS master. The parameters are accessible globally over the ROS network and can be used to store static data such as configuration parameters. Supported data types include strings, integers, doubles, logicals and cell arrays.
(https://ww2.mathworks.cn/help/robotics/examples/call-and-provide-ros-services.html)
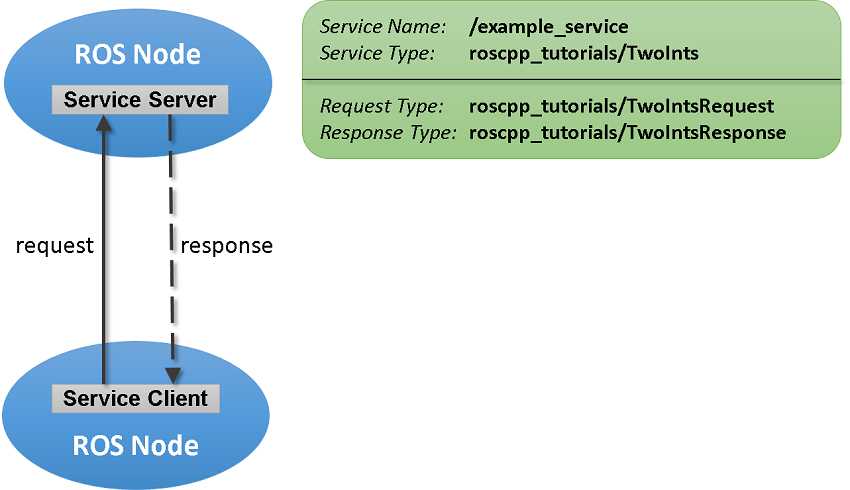
ROS supports two main communication mechanisms: topics and services. Topics have publishers and subscribers and are used for sending and receiving messages (see Exchange Data with ROS Publishers and SubscribersServices, on the other hand, implement a tighter coupling by allowing request-response communication. A service client sends a request message to a service server and waits for a response. The server will use the data in the request to construct a response message and sends it back to the client. Each service has a type that determines the structure of the request and response messages. Services also have a name that is unique in the ROS network.
This service communication has the following characteristics:
A service request (or service call) is used for one-to-one communication. A single node will initiate the request and only one node will receive the request and send back a response.
A service client and a service server are tightly coupled when a service call is executed. The server has to exist at the time of the service call and once the request is sent, the client will block until a response is received.
The concept of services is illustrated in the following image:
(https://ww2.mathworks.cn/help/robotics/examples/implement-online-slam-with-lidar-scans.html)
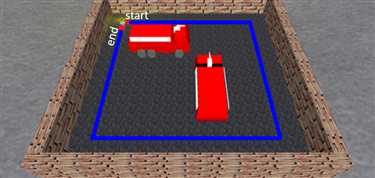
This example demonstrates how to implement the Simultaneous Localization And Mapping (SLAM) algorithm on lidar scans obtained from simulated environment using pose graph optimization.
The goal of this example is to build a map of the environment using the lidar scans and retrieve the trajectory of the robot, with the robot simulator in the loop.
The basics of SLAM algorithm can be found in the Implement Simultaneous Localization And Mapping (SLAM) with Lidar Scans example. This example requires Simulink? 3D Animation? and Robotics System Toolbox?.
Robot simulation is an essential tool in every roboticist‘s toolbox. A well-designed simulator makes it possible to rapidly test algorithms, design robots, perform regression testing, and train AI system using realistic scenarios. Gazebo offers the ability to accurately and efficiently simulate populations of robots in complex indoor and outdoor environments. At your fingertips is a robust physics engine, high-quality graphics, and convenient programmatic and graphical interfaces. Best of all, Gazebo is free with a vibrant community.
标签:nts xpl sms format images personal models ping box
原文地址:https://www.cnblogs.com/sancai16888/p/9696390.html