标签:img 关于 自由度 一个 才有 消失 取值 strong 17.
二维时:xy坐标和指向角度,例如扫地机器人,朝哪个方向运动 即 (x , y , θ )
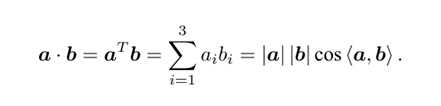
向量的内积
向量的外积

a × b = a的反对称矩阵 点乘 b =a ^ b 其中 a^ 为a的反对称矩阵
坐标系:世界坐标系,机器人坐标系,传感器坐标系
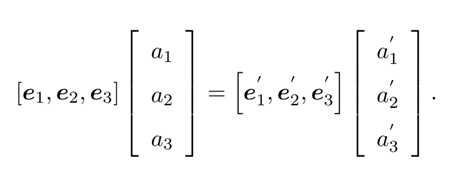
考虑旋转不考虑平移,一个固定点(坐标旋转否它就在那里),在两个坐标系的向量相等。
向量与坐标不能等同,当指定坐标系时,向量才有坐标,有实数对应。向量的坐标取值与向量和坐标系有关。
两边同时左乘一个向量,

使上式左边系数变成单位阵,即有
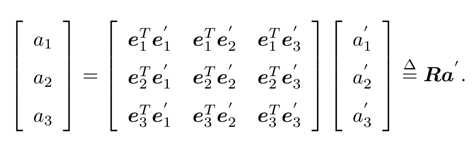
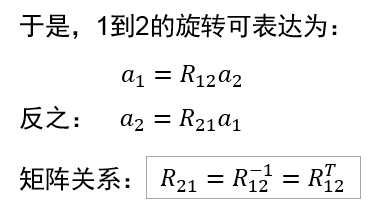
R为特殊正交群SO(3)。特殊正交群表示旋转,特殊欧式群SE(3) 表示变换即旋转+平移
性质:
有平移时
![]()
齐次形式
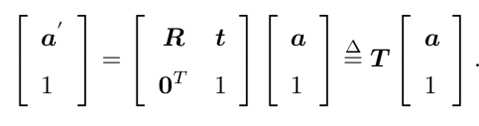
特殊欧式群

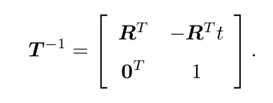
变换矩阵T的逆
方向为旋转轴,长度为转过的角度
旋转向量到旋转矩阵的转换公式,罗德里格斯公式Rodrigues‘s Formula

旋转矩阵到旋转向量

关于转轴n,旋转轴上的向量在旋转后不变,说明Rn=n。转轴n是矩阵R特征值1对应的特征向量。
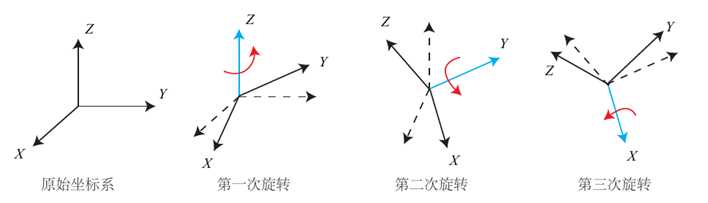
将旋转分解为三个方向的转动
例如RPY roll pitch yall
想象飞机的飞行
1 绕Z轴旋转,得到偏航角yaw
2 绕旋转后的Y轴旋转,得到俯仰角 pitch
3 绕旋转后的X轴旋转,得到滚转角roll
欧拉角存在万向锁问题
存在奇异性,消失一个自由度
不适合插值和迭代,多用于人机交互,slam中少用
标签:img 关于 自由度 一个 才有 消失 取值 strong 17.
原文地址:https://www.cnblogs.com/skyturtle/p/9696939.html