标签:定义 com push find nsf static enc circle bsp
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
Mat img1, img2, img3, img4, img5,img6,img_result, img_gray1, img_gray2, img_gray3, img_canny1,img_binary1, img_dist1,kernel_1,kernel_2,img_laplance,img_sharp;
char win1[] = "window1";
char win2[] = "window2";
char win3[] = "window3";
char win4[] = "window4";
char win5[] = "window5";
char win6[] = "window6";
char win7[] = "window7";
int thread_value = 100;
int max_value = 255;
RNG rng1(12345);
RNG rng2(1235);
int Demo_Moments();
int Demo_Moments()
{
namedWindow(win1, CV_WINDOW_AUTOSIZE);
namedWindow(win2, CV_WINDOW_AUTOSIZE);
//namedWindow(win3, CV_WINDOW_AUTOSIZE);
img1 = imread("D://images//24.jpg");
//img2 = imread("D://images//1//p5_1.jpg");
if (img1.empty())
{
cout << "could not load image..." << endl;
return 0;
}
imshow(win1, img1);
img1.copyTo(img2);
//背景色变黑色
for (size_t row =0;row<img2.rows;row++)
{
for (size_t col=0;col<img2.cols;col++)
{
//if (img2.at<Vec3b>(row,col)==Vec3b(135,26,95))
if(img2.at<Vec3b>(row,col)[0]>100 && img2.at<Vec3b>(row,col)[0]<150 && img2.at<Vec3b>(row,col)[1]>18 && img2.at<Vec3b>(row, col)[1] <80 && img2.at<Vec3b>(row,col)[2]>80 && img2.at<Vec3b>(row,col)[2]<170)
{
img2.at<Vec3b>(row, col)[0] = 0;
img2.at<Vec3b>(row, col)[1] = 0;
img2.at<Vec3b>(row, col)[2] = 0;
}
}
}
imshow(win2, img2);
img2.copyTo(img_sharp);
//通过拉普拉斯-锐化边缘
kernel_1 = (Mat_<float>(3,3)<<1,1,1,1,-8,1,1,1,1);
filter2D(img2, img_laplance, CV_32F,kernel_1, Point(-1, -1), 0, BORDER_DEFAULT);
img2.convertTo(img_sharp, CV_32F);
img3 = img_sharp - img_laplance;
img3.convertTo(img3, CV_8UC3);
img_laplance.convertTo(img_laplance, CV_8UC3);
imshow(win3, img3);
//转灰度图
cvtColor(img3, img4, CV_BGR2GRAY);
//二值化
threshold(img4, img_binary1, 40, 255, THRESH_BINARY | THRESH_OTSU);
//距离变换
distanceTransform(img_binary1, img_dist1, DIST_L1, 3, 5);
//归一化处理
normalize(img_dist1, img_dist1, 0, 1, NORM_MINMAX);
//imshow(win4,img_dist1);
//距离变换结果二值化
threshold(img_dist1, img_dist1, 0.4, 1, THRESH_BINARY);
//定义腐蚀核大小
kernel_2 = Mat::ones(3,3,CV_8UC1);
//腐蚀二值图
erode(img_dist1, img_dist1, kernel_2, Point(-1, -1));
imshow(win4, img_dist1);
img_dist1.convertTo(img5, CV_8U);
//查找轮廓,标记,得到标记轮廓的图片
vector<vector<Point>> vec_points;
//查找轮廓
findContours(img5, vec_points, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE, Point(0, 0));
//
img6 = Mat::zeros(img1.size(),CV_32SC1);
for (size_t i=0;i<vec_points.size();i++)
{
//drawContours(img6, vec_points, static_cast<int>(i), Scalar(rng1.uniform(0,255), rng1.uniform(0, 255), rng1.uniform(0, 255)),-1);
drawContours(img6, vec_points, static_cast<int>(i), Scalar::all(static_cast<int>(i) + 1), -1);
//drawContours(img6, vec_points, static_cast<int>(i), Scalar(theRNG().uniform(0, 255), theRNG().uniform(0, 255), theRNG().uniform(0, 255)), -1);
}
//circle(img6,Point(5,5),3,Scalar(rng1.uniform(0, 255), rng1.uniform(0, 255), rng1.uniform(0, 255)),-1);
//circle(img6, Point(5, 5), 3, Scalar(theRNG().uniform(0, 255), theRNG().uniform(0, 255), theRNG().uniform(0, 255)), -1);
circle(img6,Point(5,5),3,Scalar(255,255,255),-1);
imshow(win5,img6*3000);
//在标记图片的基础上进行分水岭变换
watershed(img1,img6);
Mat img_mark = Mat::zeros(img6.size(),CV_8UC1);
img6.convertTo(img_mark,CV_8UC1);
//取反
bitwise_not(img_mark,img_mark,Mat());
imshow(win6,img_mark);
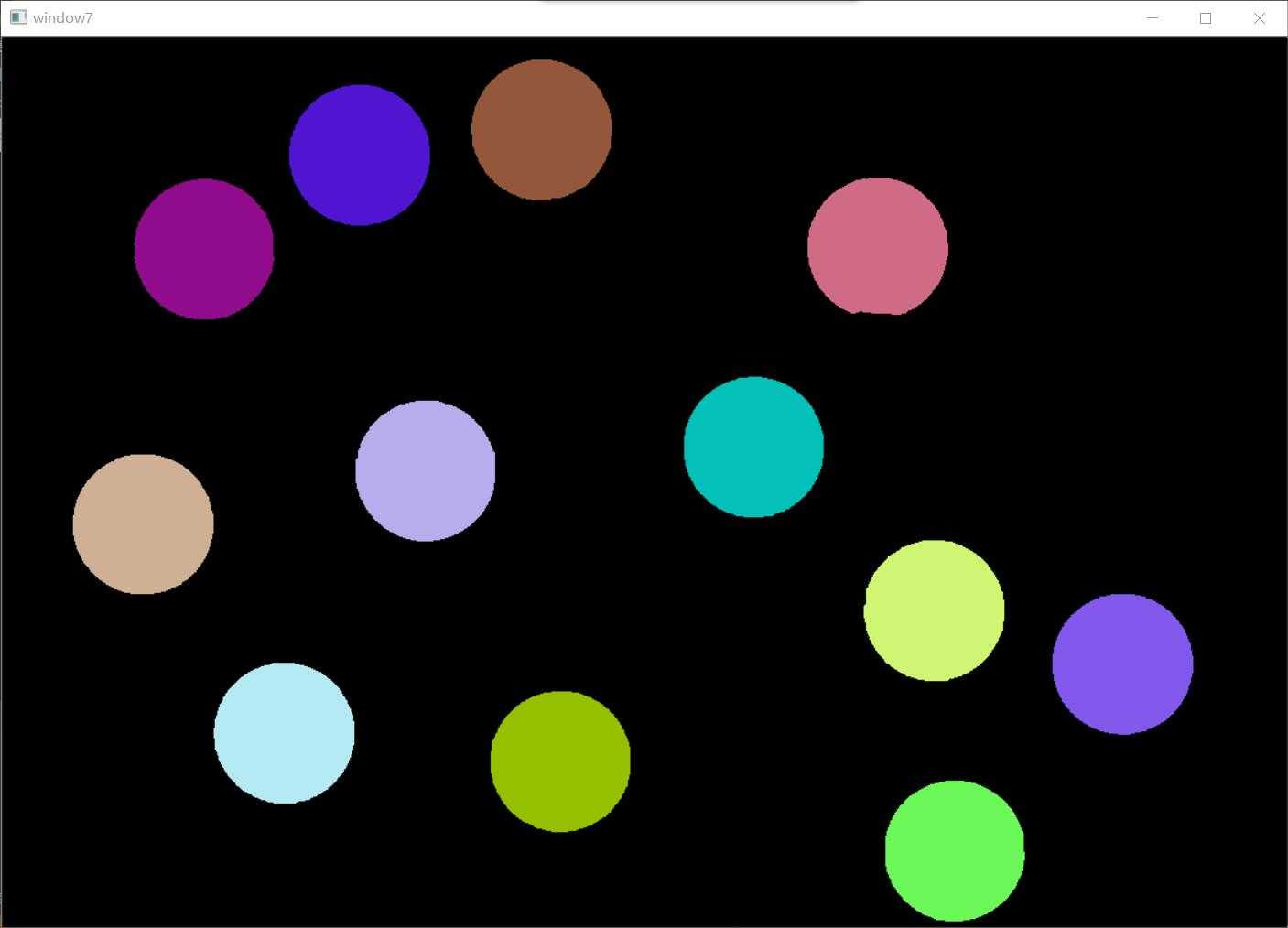
//着色
vector<Vec3b> vec_colors;
for (size_t j=0;j<vec_points.size();j++)
{
int color_r = rng2.uniform(0,255);
int color_g = rng2.uniform(0, 255);
int color_b = rng2.uniform(0, 255);
//int color_r = theRNG().uniform(10, 255);
//int color_g = theRNG().uniform(10, 255);
//int color_b = theRNG().uniform(10, 255);
vec_colors.push_back(Vec3b((uchar)color_b,(uchar)color_g,(uchar)color_r));
//vec_colors.push_back(Vec3b((uchar)rng1.uniform(0,255), (uchar)rng1.uniform(0, 255), (uchar)rng1.uniform(0, 255)));
}
img_result = Mat::zeros(img6.size(),CV_8UC3);
for (size_t row=0;row<img6.rows;row++)
{
for (size_t col=0;col<img6.cols;col++)
{
int index_1 = img6.at<int>(row,col);
if (index_1>0 && index_1<=static_cast<int>(vec_points.size()))
{
img_result.at<Vec3b>(row, col) = vec_colors[index_1 -1];
}
else
{
img_result.at<Vec3b>(row, col) = Vec3b(0,0,0);
}
}
}
imshow(win7, img_result);
return 0;
}
int main()
{
Demo_Moments();
waitKey(0);
return 0;
}
标签:定义 com push find nsf static enc circle bsp
原文地址:https://www.cnblogs.com/herd/p/9739619.html