标签:loading result opera convnet channels char tac crash hung
Wait, what’s transfer learning? And why ResNet-50?
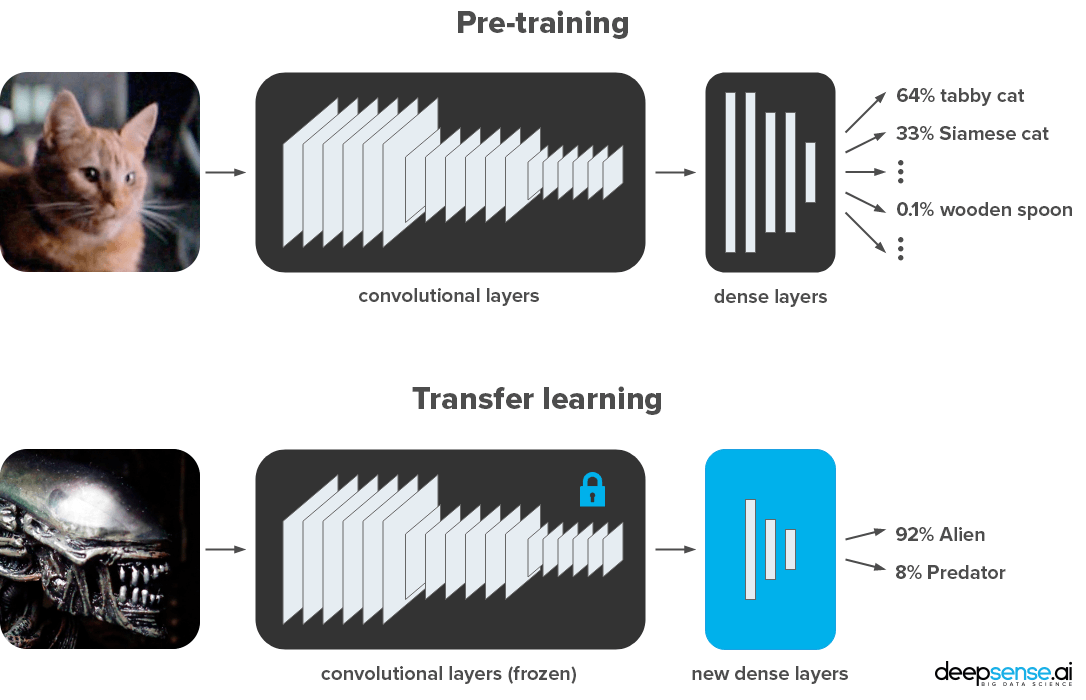
In practice, very few people train an entire Convolutional Network from scratch (with random initialization), because it is relatively rare to have a dataset of sufficient size. Instead, it is common to pretrain a ConvNet on a very large dataset (e.g. ImageNet, which contains 1.2 million images with 1000 categories), and then use the ConvNet either as an initialization or a fixed feature extractor for the task of interest.
Andrej Karpathy
Transfer Learning – CS231n Convolutional Neural Networks for Visual Recognition
Transfer learning is a process of making tiny adjustments to a network trained on a given task to perform another, similar task. In our case we work with the ResNet-50 model trained to classify images from the ImageNet dataset. It is enough to learn a lot of textures and patterns that may be useful in other visual tasks, even as alien as this Alien vs. Predator case. That way, we use much less computing power to achieve much better result.
In our case we do it the simplest way:
So, which network should be chosen as the feature extractor?
ResNet-50 is a popular model for ImageNet image classification (AlexNet, VGG, GoogLeNet, Inception, Xception are other popular models). It is a 50-layer deep neural network architecture based on residual connections, which are connections that add modifications with each layer, rather than completely changing the signal.
ResNet was the state-of-the-art on ImageNet in 2015. Since then, newer architectures with higher scores on ImageNet have been invented. However, they are not necessarily better at generalizing to other datasets (see the Do Better ImageNet Models Transfer Better? arXiv paper).
Ok, it’s time to dive into the code.
We do our Alien vs. Predator task in seven steps:
We supplement this blog post with Python code in Jupyter Notebooks (Keras-ResNet50.ipynb, PyTorch-ResNet50.ipynb). This environment is more convenient for prototyping than bare scripts, as we can execute it cell by cell and peak into the output.
All right, let’s go!
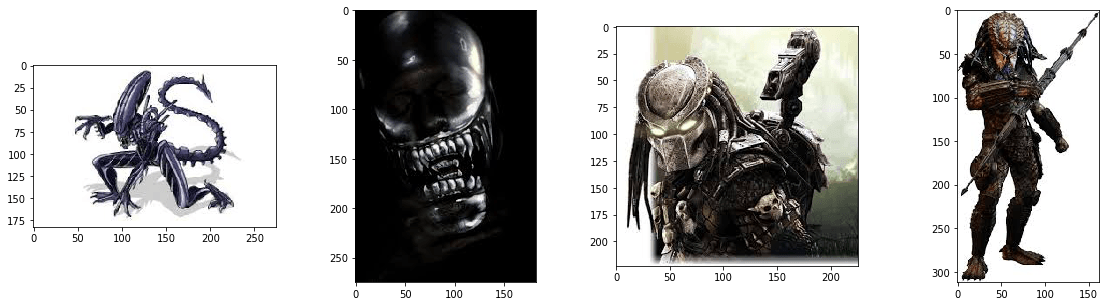
We created a dataset by performing a Google Search with the words “alien” and “predator”. We saved JPG thumbnails (around 250×250 pixels) and manually filtered the results. Here are some examples:
We split our data into two parts:
Keras requires the datasets to be organized in folders in the following way:
|-- train |-- alien |-- predator |-- validation |-- alien |-- predator
If you want to see the process of organizing data into directories, check out the data_prep.ipynb file. You can download the dataset from Kaggle.
First, the technicalities. We assume that you have Python 3.5+, Keras 2.2.2 (with TensorFlow 1.10.1 backend) and PyTorch 0.4.1. Check out the requirements.txt file in the repo.
So, first, we need to import the required modules. We separate the code in Keras, PyTorch and common (one required in both).
|
1
2
3
4
|
importnumpy asnp
importmatplotlib.pyplot asplt
fromPIL importImage
%matplotlib inline
|
|
1
2
3
4
5
6
|
importkeras
fromkeras.preprocessing.image importImageDataGenerator
fromkeras.applications importResNet50
fromkeras.applications.resnet50 importpreprocess_input
fromkeras importModel,layers
fromkeras.models importload_model,model_from_json
|
|
1
2
3
4
5
|
importtorch
fromtorchvision importdatasets,models,transforms
importtorch.nn asnn
fromtorch.nn importfunctional asF
importtorch.optim asoptim
|
We can check the frameworks’ versions by typing keras.__version__ and torch.__version__, respectively.
Normally, the images can’t all be loaded at once, as doing so would be too much for the memory to handle. At the same time, we want to benefit from the GPU’s performance boost by processing a few images at once. So we load images in batches (e.g. 32 images at once) using data generators. Each pass through the whole dataset is called an epoch.
We also use data generators for preprocessing: we resize and normalize images to make them as ResNet-50 likes them (224 x 224 px, with scaled color channels). And last but not least, we use data generators to randomly perturb images on the fly:
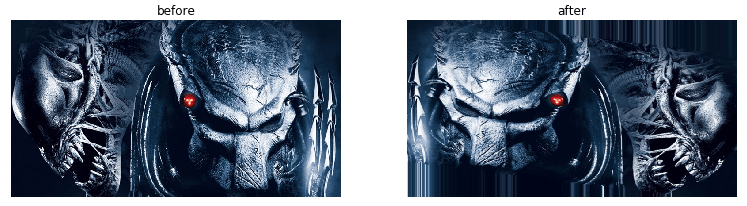
Performing such changes is called data augmentation. We use it to show a neural network which kinds of transformations don’t matter. Or, to put it another way, we train on a potentially infinite dataset by generating new images based on the original dataset.
Almost all visual tasks benefit, to varying degrees, from data augmentation for training. For more info about data augmentation, see as applied to plankton photos or how to use it in Keras. In our case, we randomly shear, zoom and horizontally flip our aliens and predators.
Here we create generators that:
train_datagen=ImageDataGenerator( shear_range=10, zoom_range=0.2, horizontal_flip=True, preprocessing_function=preprocess_input) train_generator=train_datagen.flow_from_directory( ‘data/train‘, batch_size=32, class_mode=‘binary‘, target_size=(224,224)) validation_datagen=ImageDataGenerator( preprocessing_function=preprocess_input) validation_generator=validation_datagen.flow_from_directory( ‘data/validation‘, shuffle=False, class_mode=‘binary‘, target_size=(224,224))
normalize=transforms.Normalize(mean=[0.485,0.456,0.406], std=[0.229,0.224,0.225]) data_transforms={ ‘train‘: transforms.Compose([ transforms.Resize((224,224)), transforms.RandomAffine(0,shear=10,scale=(0.8,1.2)), transforms.RandomHorizontalFlip(), transforms.ToTensor(), normalize]), ‘validation‘: transforms.Compose([ transforms.Resize((224,224)), transforms.ToTensor(), normalize])} image_datasets={ ‘train‘: datasets.ImageFolder(‘data/train‘,data_transforms[‘train‘]), ‘validation‘: datasets.ImageFolder(‘data/validation‘,data_transforms[‘validation‘])} dataloaders={ ‘train‘: torch.utils.data.DataLoader( image_datasets[‘train‘], batch_size=32, shuffle=True, num_workers=4), ‘validation‘: torch.utils.data.DataLoader( image_datasets[‘validation‘], batch_size=32, shuffle=False, num_workers=4)}
In Keras, you get built-in augmentations and preprocess_input method normalizing images put to ResNet-50, but you have no control over their order. In PyTorch, you have to normalize images manually, but you can arrange augmentations in any way you like.
There are also other nuances: for example, Keras by default fills the rest of the augmented image with the border pixels (as you can see in the picture above) whereas PyTorch leaves it black. Whenever one framework deals with your task much better than the other, take a closer look to see if they perform preprocessing identically; we bet they don’t.
The next step is to import a pre-trained ResNet-50 model, which is a breeze in both cases. We freeze all the ResNet-50’s convolutional layers, and only train the last two fully connected (dense) layers. As our classification task has only 2 classes (compared to 1000 classes of ImageNet), we need to adjust the last layer.
Here we:
conv_base=ResNet50(include_top=False, weights=‘imagenet‘) forlayer inconv_base.layers: layer.trainable=False x=conv_base.output x=layers.GlobalAveragePooling2D()(x) x=layers.Dense(128,activation=‘relu‘)(x) predictions=layers.Dense(2,activation=‘softmax‘)(x) model=Model(conv_base.input,predictions) optimizer=keras.optimizers.Adam() model.compile(loss=‘sparse_categorical_crossentropy‘, optimizer=optimizer, metrics=[‘accuracy‘])
device=torch.device("cuda:0"iftorch.cuda.is_available()else"cpu") model=models.resnet50(pretrained=True).to(device) forparam inmodel.parameters(): param.requires_grad=False model.fc=nn.Sequential( nn.Linear(2048,128), nn.ReLU(inplace=True), nn.Linear(128,2)).to(device) criterion=nn.CrossEntropyLoss() optimizer=optim.Adam(model.fc.parameters())
We load the ResNet-50 from both Keras and PyTorch without any effort. They also offer many other well-known pre-trained architectures: see Keras’ model zoo and PyTorch’s model zoo. So, what are the differences?
In Keras we may import only the feature-extracting layers, without loading extraneous data ( include_top=False). We then create a model in a functional way, using the base model’s inputs and outputs. Then we use model.compile(...) to bake into it the loss function, optimizer and other metrics.
In PyTorch, the model is a Python object. In the case of models.resnet50, dense layers are stored in model.fc attribute. We overwrite them. The loss function and optimizers are separate objects. For the optimizer, we need to explicitly pass a list of parameters we want it to update.
 Frame from ‘AVP: Alien vs. Predator’: Predators’ wrist computer. We’re pretty sure Predator could use it to compute logsoftmax.
Frame from ‘AVP: Alien vs. Predator’: Predators’ wrist computer. We’re pretty sure Predator could use it to compute logsoftmax.
In PyTorch, we should explicitly specify what we want to load to the GPU using .to(device) method. We have to write it each time we intend to put an object on the GPU, if available. Well…
Layer freezing works in a similar way. However, in The Batch Normalization layer of Keras is broken (as of the current version; thx Przemys?aw Pobrotyn for bringing this issue). That is – some layers get modified anyway, even with trainable = False.
Keras and PyTorch deal with log-loss in a different way.
In Keras, a network predicts probabilities (has a built-in softmax function), and its built-in cost functions assume they work with probabilities.
In PyTorch we have more freedom, but the prefered way is to return logits. This is done for numerical reasons, performing softmax then log-loss means doing unnecessary log(exp(x)) operations. So, instead of using softmax, we use LogSoftmax (and NLLLoss) or combine them into one nn.CrossEntropyLoss loss function.
OK, ResNet is loaded, so let’s get ready to space rumble!
 Frame from ‘AVP: Alien vs. Predator’: the Predators’ Mother Ship. Yes, we’ve heard that there are no rumbles in space, but nothing is impossible for Aliens and Predators.
Frame from ‘AVP: Alien vs. Predator’: the Predators’ Mother Ship. Yes, we’ve heard that there are no rumbles in space, but nothing is impossible for Aliens and Predators.
Now, we proceed to the most important step – model training. We need to pass data, calculate the loss function and modify network weights accordingly. While we already had some differences between Keras and PyTorch in data augmentation, the length of code was similar. For training… the difference is massive. Let’s see how it works!
Here we:
history=model.fit_generator( generator=train_generator, epochs=3, validation_data=validation_generator)
deftrain_model(model,criterion,optimizer,num_epochs=3): forepoch inrange(num_epochs): print(‘Epoch {}/{}‘.format(epoch+1,num_epochs)) print(‘-‘*10) forphase in[‘train‘,‘validation‘]: ifphase==‘train‘: model.train() else: model.eval() running_loss=0.0 running_corrects=0 forinputs,labels indataloaders[phase]: inputs=inputs.to(device) labels=labels.to(device) outputs=model(inputs) loss=criterion(outputs,labels) ifphase==‘train‘: optimizer.zero_grad() loss.backward() optimizer.step() _,preds=torch.max(outputs,1) running_loss+=loss.item()*inputs.size(0) running_corrects+=torch.sum(preds==labels.data) epoch_loss=running_loss/len(image_datasets[phase]) epoch_acc=running_corrects.double()/len(image_datasets[phase]) print(‘{} loss: {:.4f}, acc: {:.4f}‘.format(phase, epoch_loss, epoch_acc)) returnmodel model_trained=train_model(model,criterion,optimizer,num_epochs=3)
In Keras, the model.fit_generator performs the training… and that’s it! Training in Keras is just that convenient. And as you can find in the notebook, Keras also gives us a progress bar and a timing function for free. But if you want to do anything nonstandard, then the pain begins…
 Predator’s shuriken returning to its owner automatically. Would you prefer to implement its tracking ability in Keras or PyTorch?
Predator’s shuriken returning to its owner automatically. Would you prefer to implement its tracking ability in Keras or PyTorch?
PyTorch is on the other pole. Everything is explicit here. You need more lines to construct the basic training, but you can freely change and customize all you want.
Let’s shift gears and dissect the PyTorch training code. We have nested loops, iterating over:
The epoch loop does nothing but repeat the code inside. The training and validation phases are done for three reasons:
We take care of computing the epoch losses and prints ourselves.
Once our network is trained, often with high computational and time costs, it’s good to keep it for later. Broadly, there are two types of savings:
Here we:
|
1
2
3
4
5
6
7
|
# architecture and weights to HDF5
model.save(‘models/keras/model.h5‘)
# architecture to JSON, weights to HDF5
model.save_weights(‘models/keras/weights.h5‘)
withopen(‘models/keras/architecture.json‘,‘w‘)asf:
f.write(model.to_json())
|
|
1
|
torch.save(model_trained.state_dict(),‘models/pytorch/weights.h5‘)
|
 Frame from ‘Alien: Resurrection’: Alien is evolving, just like PyTorch.
Frame from ‘Alien: Resurrection’: Alien is evolving, just like PyTorch.
One line of code is enough in both frameworks. In Keras you can either save everything to a HDF5 file or save the weights to HDF5 and the architecture to a readable json file. By the way: you can then load the model and run it in the browser.
Currently, PyTorch creators recommend saving the weights only. They discourage saving the whole model because the API is still evolving.
Loading models is as simple as saving. You should just remember which saving method you chose and the file paths.
Here we:
|
1
2
3
4
5
6
7
|
# architecture and weights from HDF5
model=load_model(‘models/keras/model.h5‘)
# architecture from JSON, weights from HDF5
withopen(‘models/keras/architecture.json‘)asf:
model=model_from_json(f.read())
model.load_weights(‘models/keras/weights.h5‘)
|
|
1
2
3
4
5
6
|
model=models.resnet50(pretrained=False).to(device)
model.fc=nn.Sequential(
nn.Linear(2048,128),
nn.ReLU(inplace=True),
nn.Linear(128,2)).to(device)
model.load_state_dict(torch.load(‘models/pytorch/weights.h5‘))
|
In Keras we can load a model from a JSON file, instead of creating it in Python (at least when we don’t use custom layers). This kind of serialization makes it convenient for transfering models.
PyTorch can use any Python code. So pretty much we have to re-create a model in Python.
Loading model weights is similar in both frameworks.
All right, it’s finally time to make some predictions! To fairly check the quality of our solution, we ask the model to predict the type of monsters from images not used for training. We can use the validation set, or any other image.
Here we:
|
1
2
3
4
|
validation_img_paths=["data/validation/alien/11.jpg",
"data/validation/alien/22.jpg",
"data/validation/predator/33.jpg"]
img_list=[Image.open(img_path)forimg_path invalidation_img_paths]
|
|
1
2
3
4
|
validation_batch=np.stack([preprocess_input(np.array(img.resize((img_size,img_size))))
forimg inimg_list])
pred_probs=model.predict(validation_batch)
|
|
1
2
3
4
5
|
validation_batch=torch.stack([data_transforms[‘validation‘](img).to(device)
forimg inimg_list])
pred_logits_tensor=loaded_model(validation_batch)
pred_probs=F.softmax(pred_logits_tensor,dim=1).cpu().data.numpy()
|
|
1
2
3
4
5
6
7
|
fig,axs=plt.subplots(1,len(img_list),figsize=(20,5))
fori,img inenumerate(img_list):
ax=axs[i]
ax.axis(‘off‘)
ax.set_title("{:.0f}% Alien, {:.0f}% Predator".format(100*pred_probs[i,0],
100*pred_probs[i,1]))
ax.imshow(img)
|
Prediction, like training, works in batches (here we use a batch of 3; though we could surely also use a batch of 1). In both Keras and PyTorch we need to load and preprocess the data. A rookie mistake is to forget about the preprocessing step (including color scaling). It is likely to work, but result in worse predictions (since it effectively sees the same shapes but with different colors and contrasts).
In PyTorch there are two more steps, as we need to:
And this is what we get:

It works!
And how about other images? If you can’t come up with anything (or anyone) else, try using photos of your co-workers. ??
As you can see, Keras and PyTorch differ significantly in terms of how standard deep learning models are defined, modified, trained, evaluated, and exported. For some parts it’s purely about different API conventions, while for others fundamental differences between levels of abstraction are involved.
Keras operates on a much higher level of abstraction. It is much more plug&play, and typically more succinct, but at the cost of flexibility.
PyTorch provides more explicit and detailed code. In most cases it means debuggable and flexible code, with only small overhead. Yet, training is way-more verbose in PyTorch. It hurts, but at times provides a lot of flexibility.
Transfer learning is a big topic. Try tweaking your parameters (e.g. dense layers, optimizer, learning rate, augmentation) or choose a different network architecture. BTW: Or join a free webinar (10 Oct 2018), so you can ask more questions.
Have you tried transfer learning for image recognition? Consider the list below for some inspiration:
Keras vs. PyTorch in Transfer Learning
标签:loading result opera convnet channels char tac crash hung
原文地址:https://www.cnblogs.com/jins-note/p/9744803.html