标签:ike lan info random sea system api check exp
https://blog.csdn.net/DinnerHowe/article/details/80267062
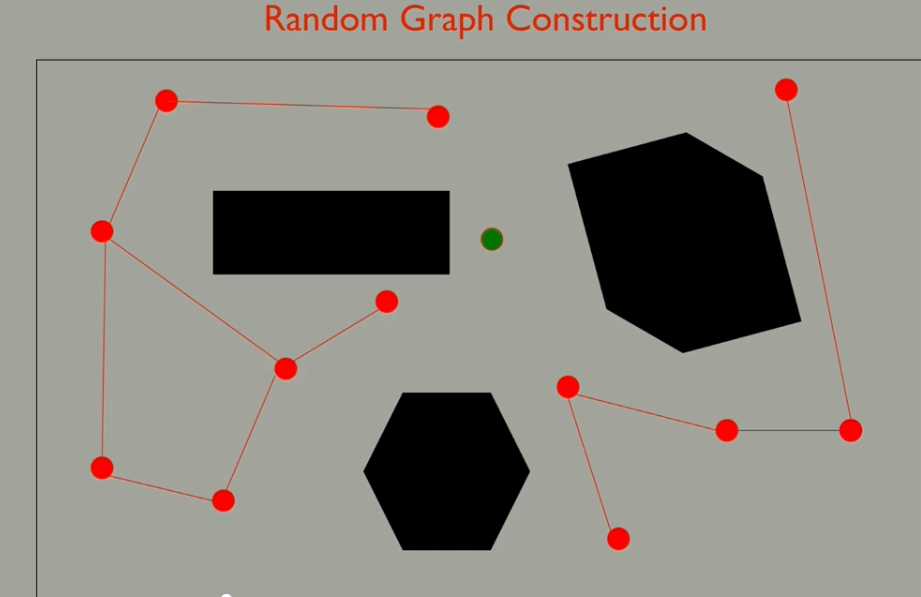
1, initialize by random sampling
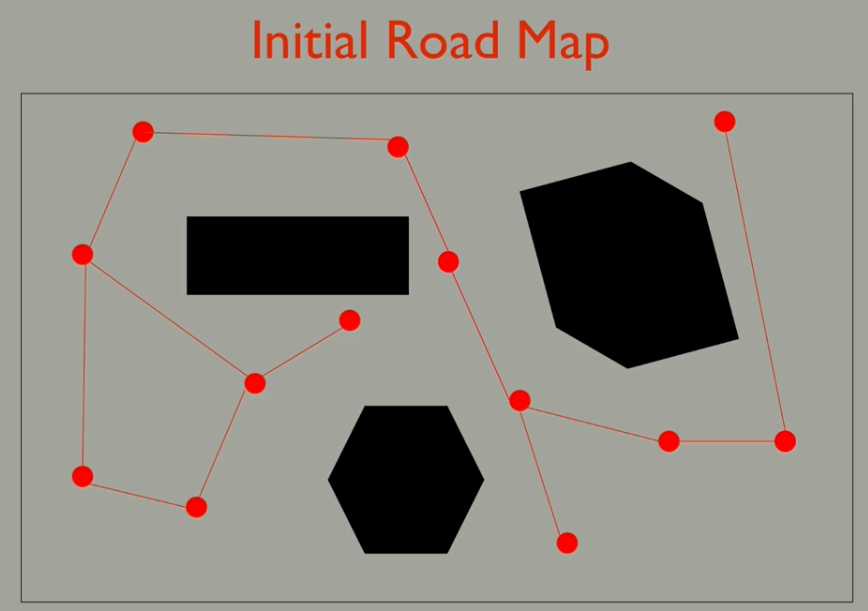
PRM is not Not complete
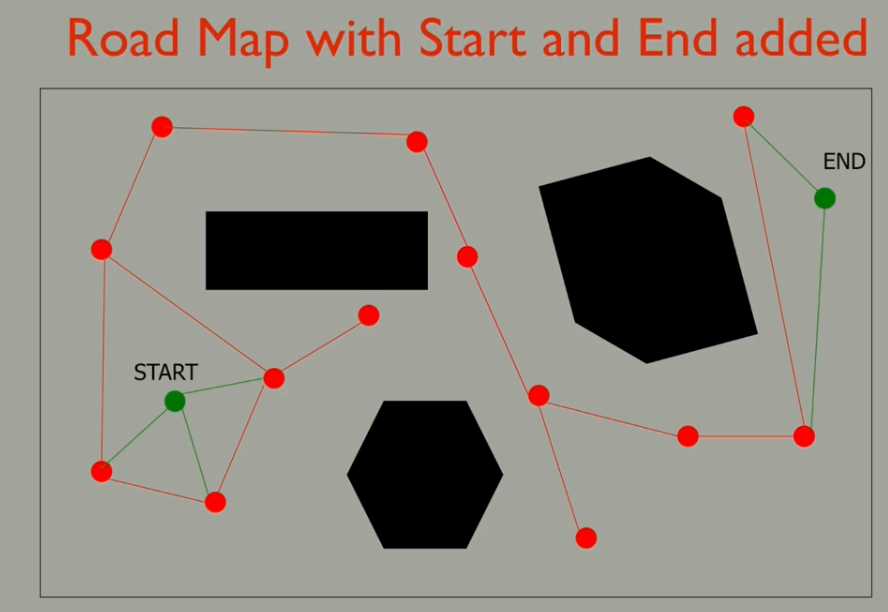
Edge case:
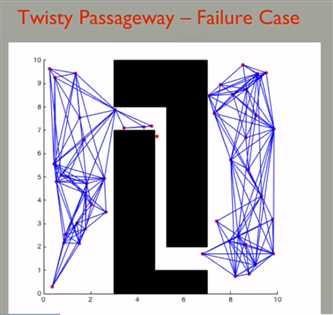
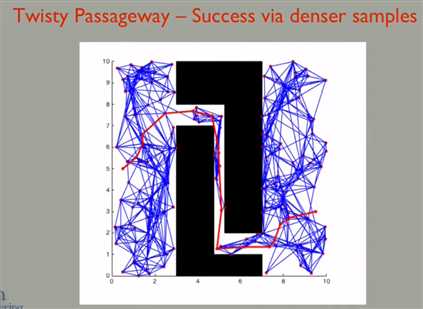 only probably complete, one stratety is to generate more samples between closed barriers.
only probably complete, one stratety is to generate more samples between closed barriers.
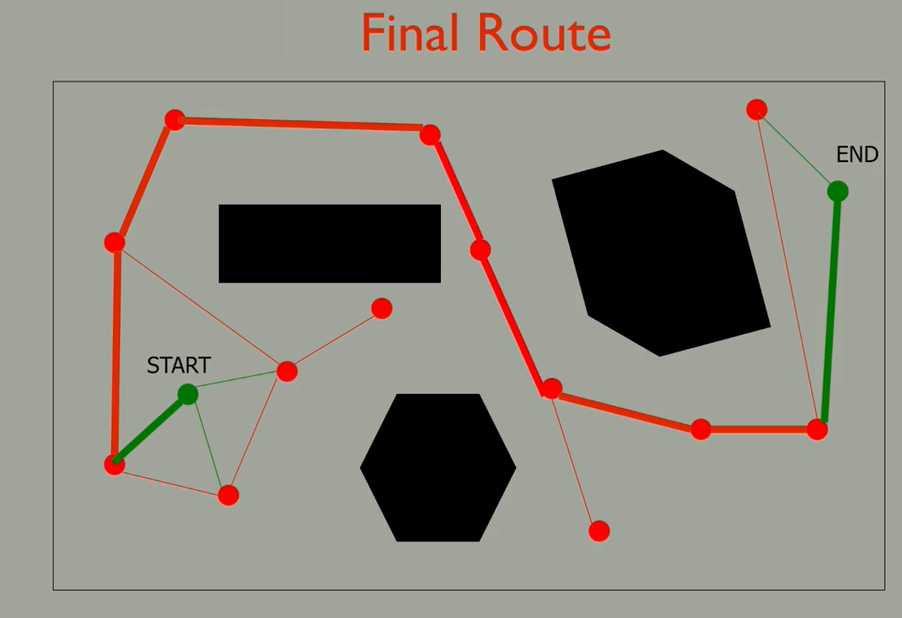
(PRM buiding the map, whcih can be used in multiple tasks, but it‘s not efficient when only have to solve one problem and search the entire free space)
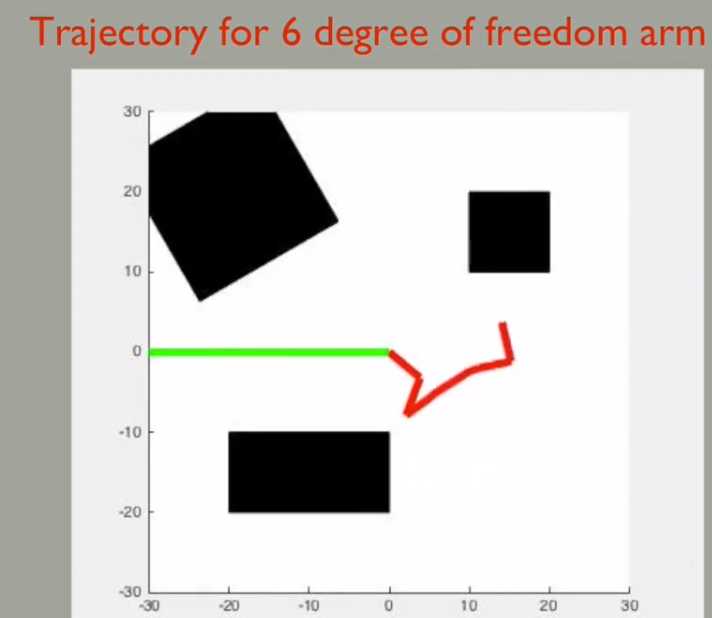
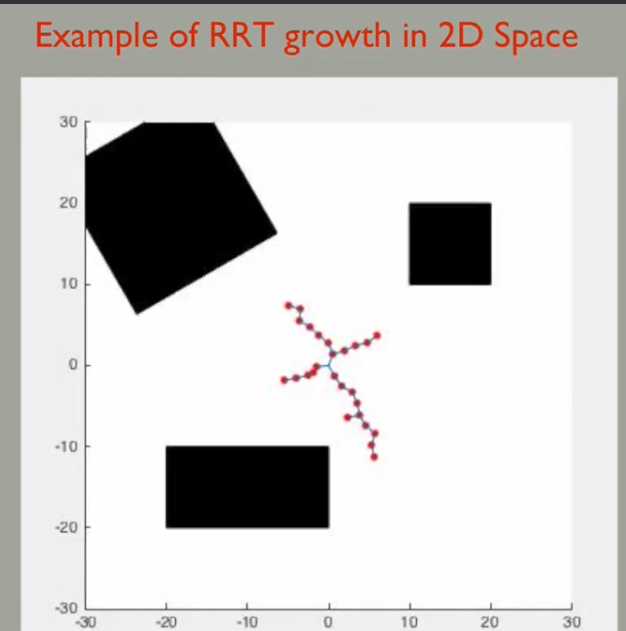
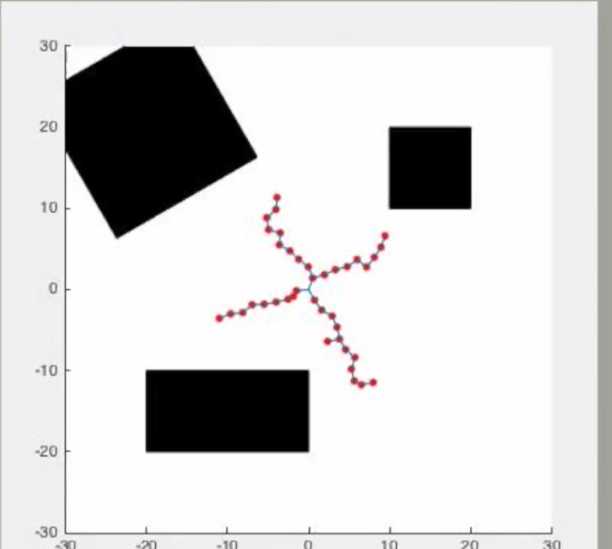
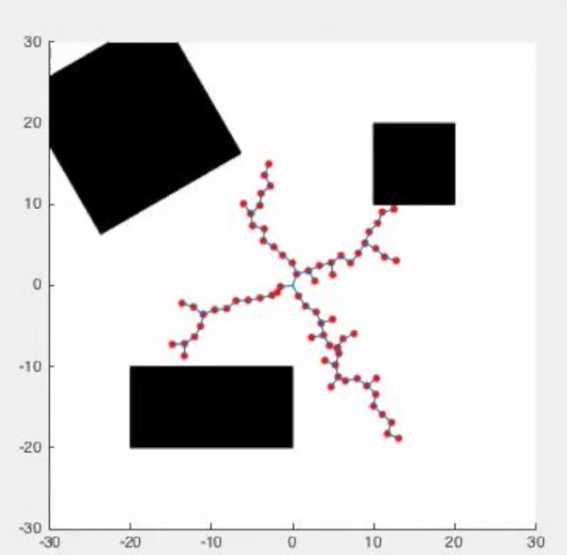
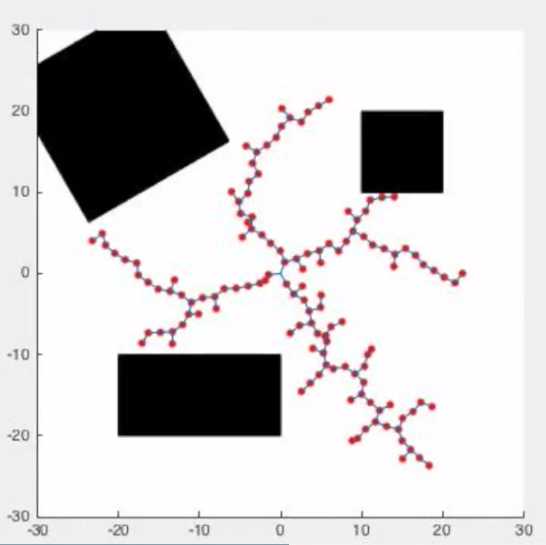
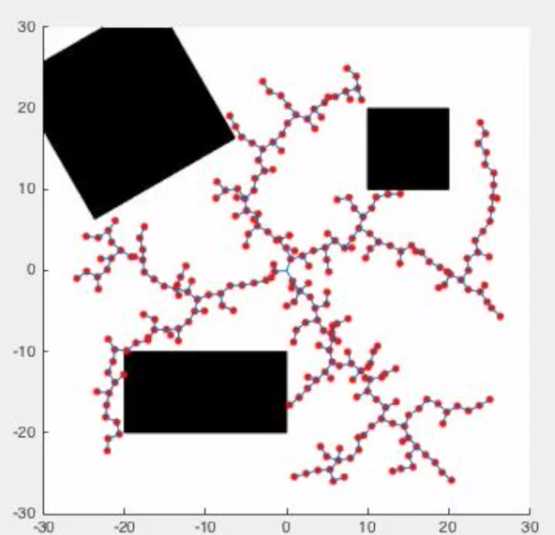
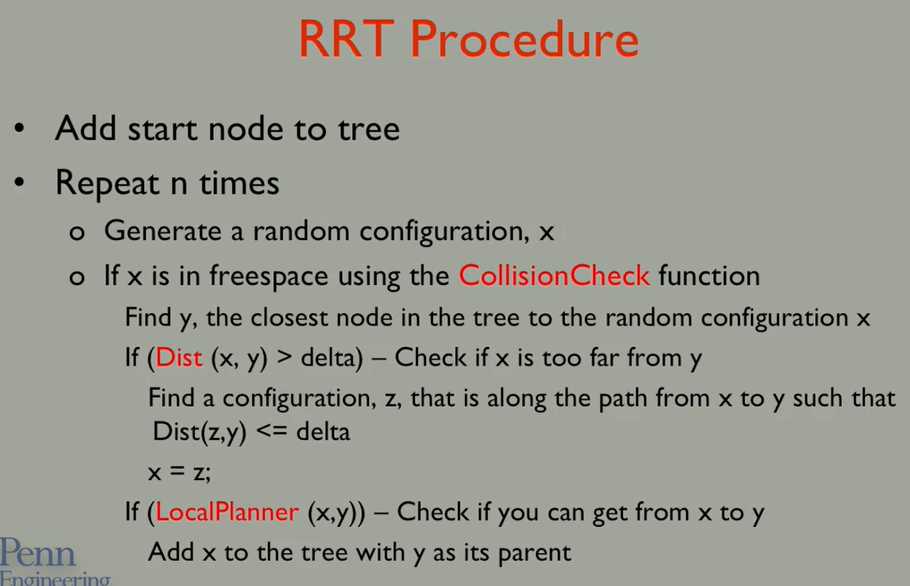
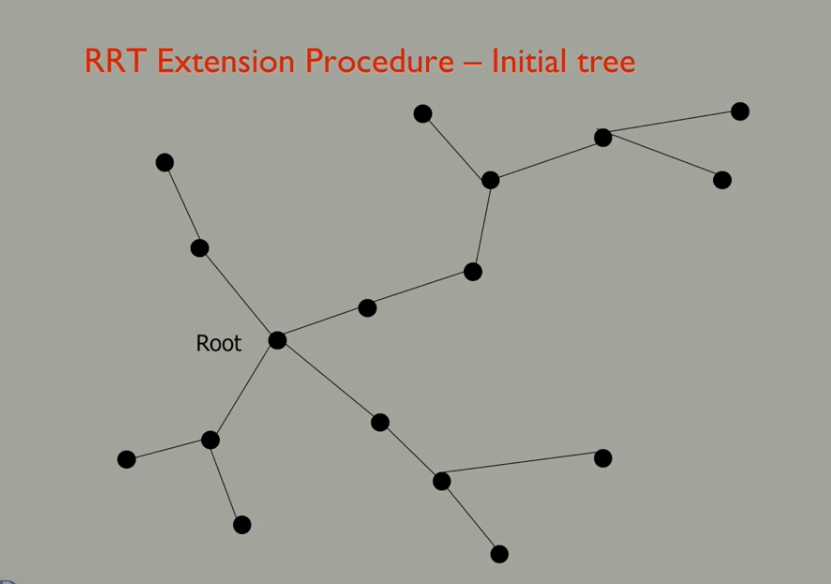
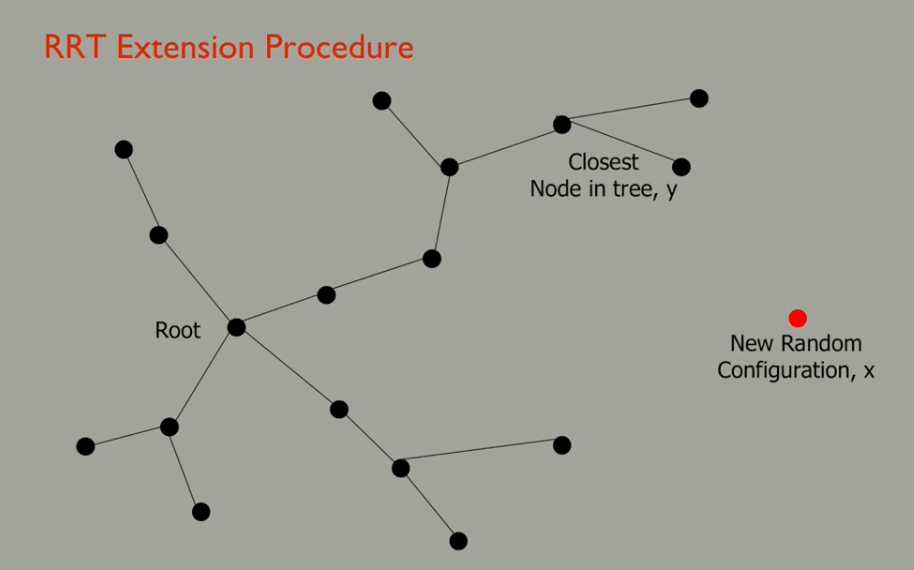
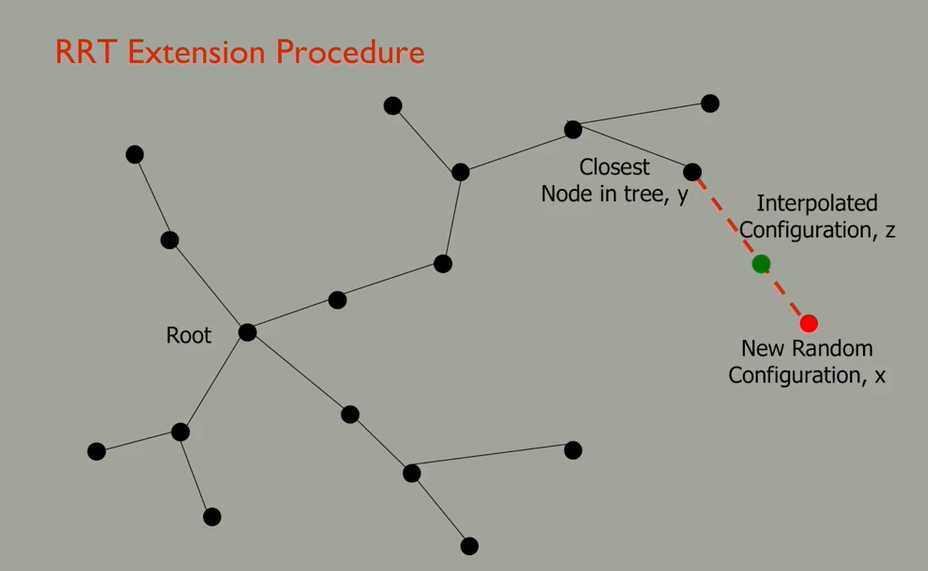
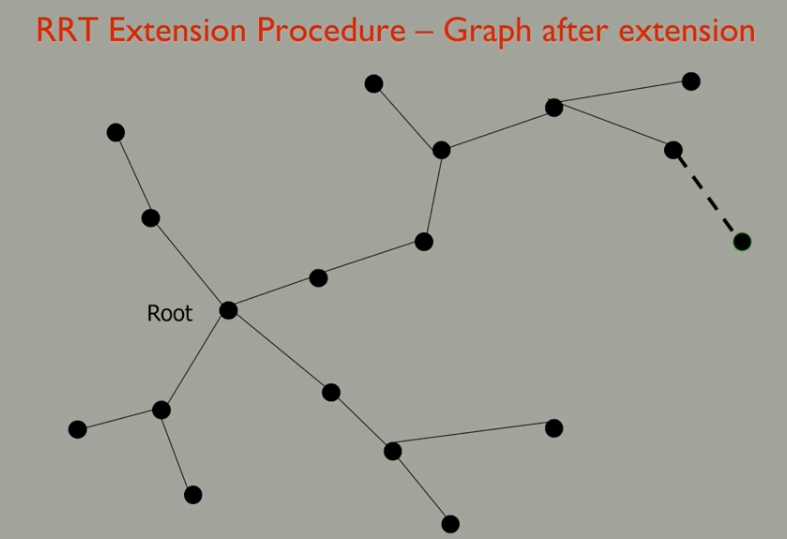
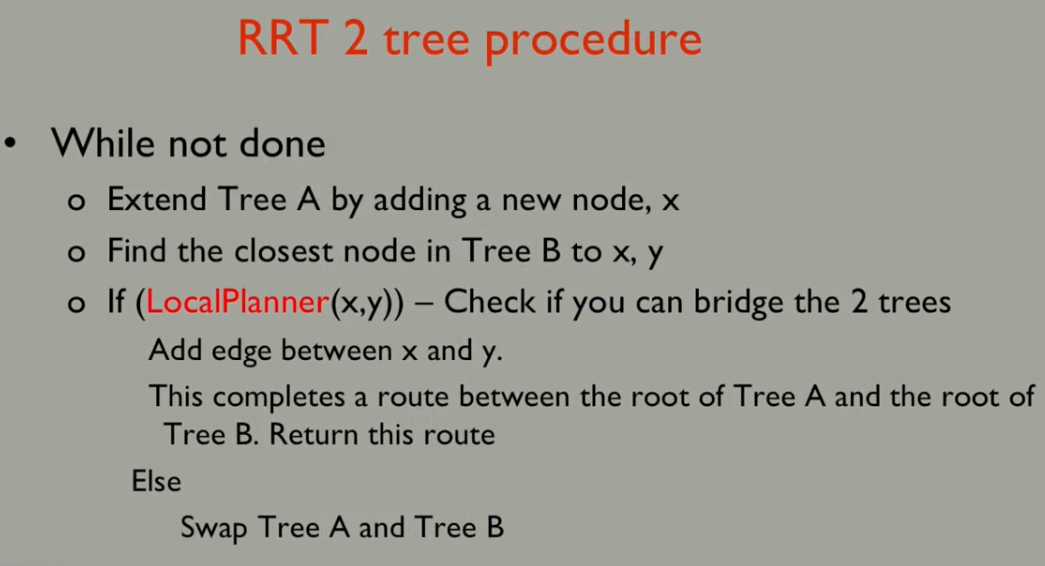
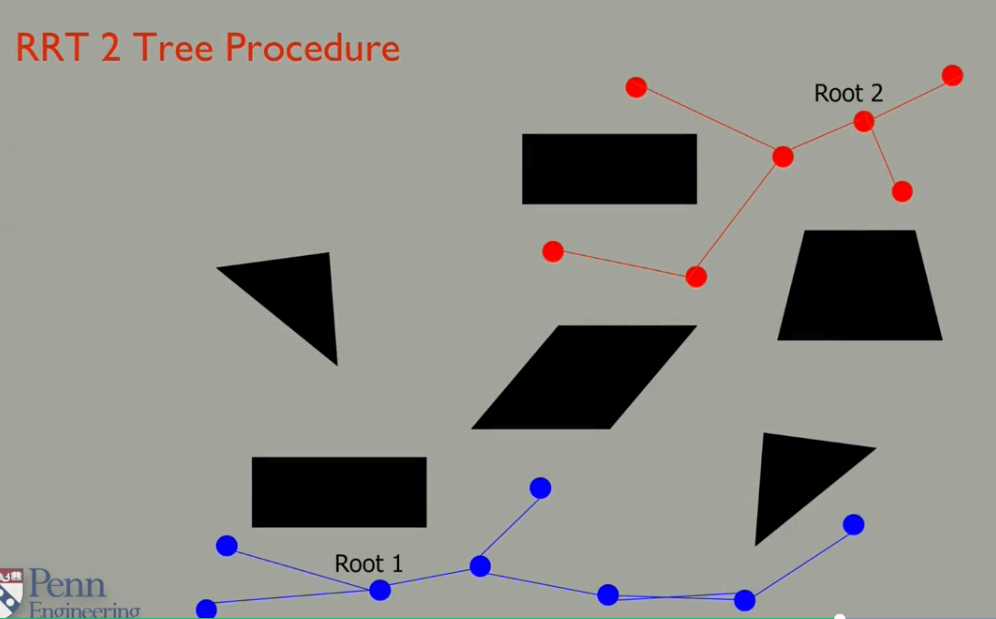
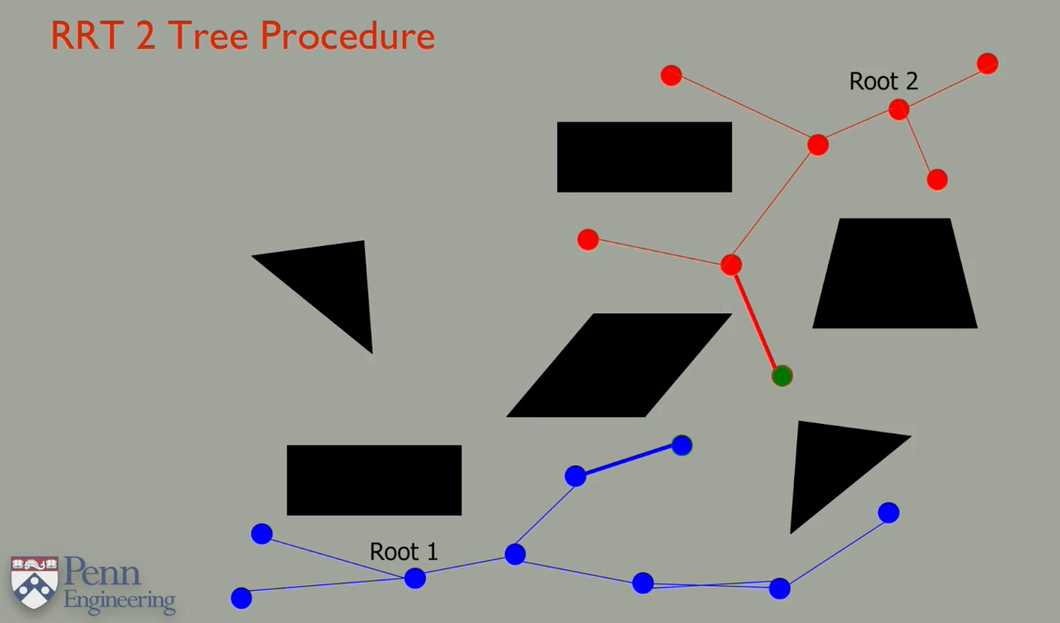
Rapid Exploring Random Trees (RRT)

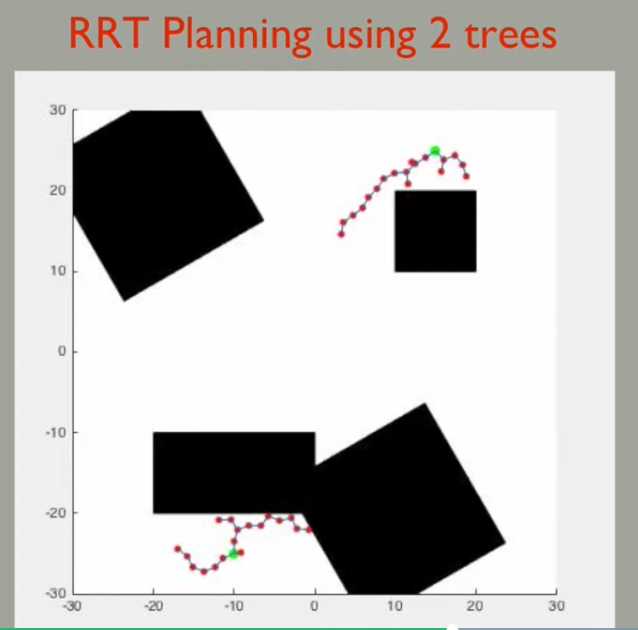
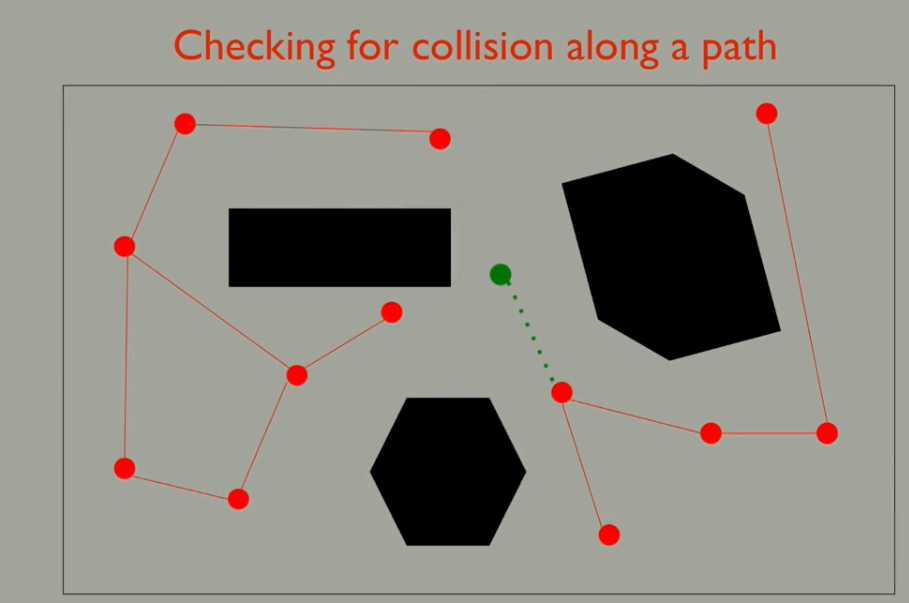
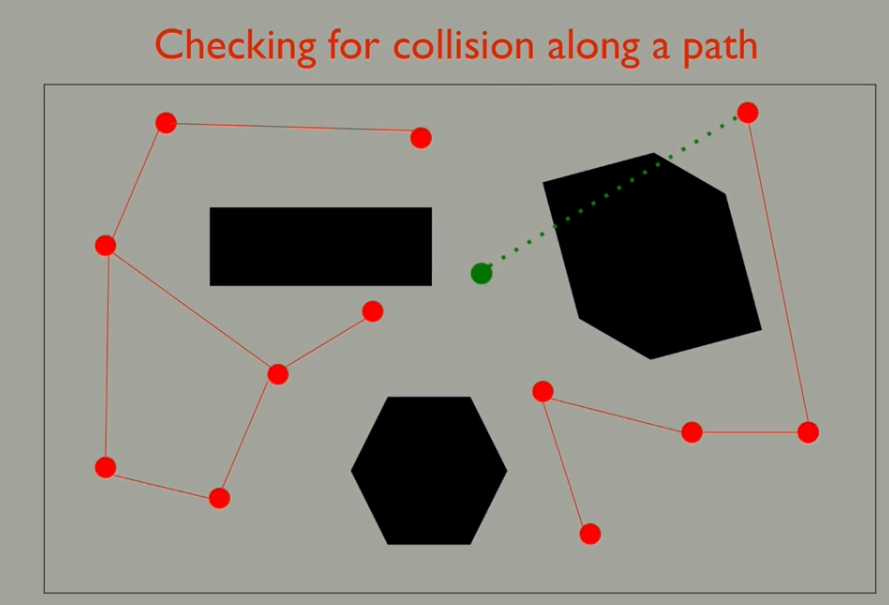
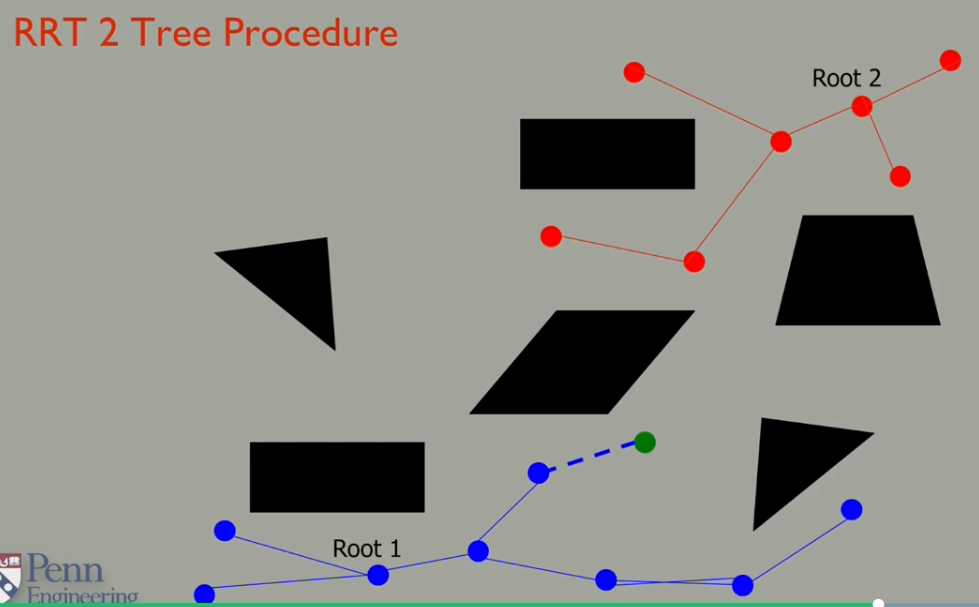 check if green node (new node in blue tree) can be lined to the red tree
check if green node (new node in blue tree) can be lined to the red tree
 not succeed
not succeed
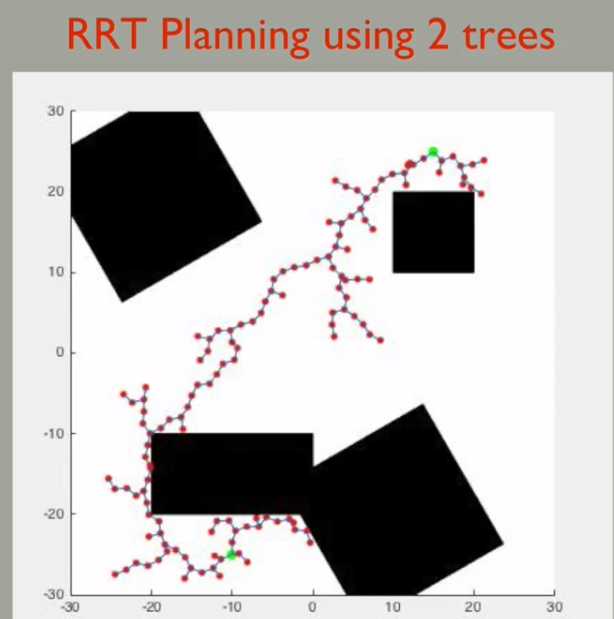
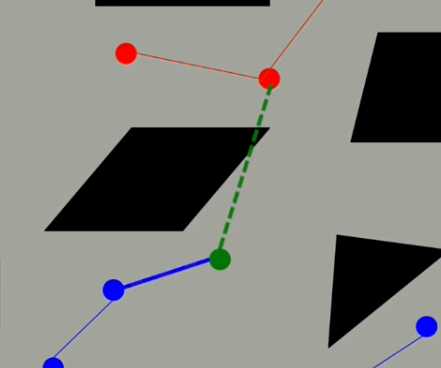
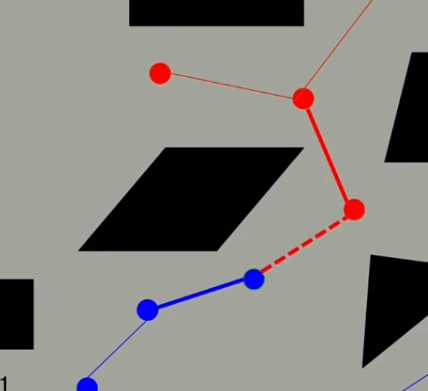 succeed this time
succeed this time
Example: Car-like robot
UPenn - Robotics 2:Computational Motion Planning - week 3: Probabilistic Road Maps
标签:ike lan info random sea system api check exp
原文地址:https://www.cnblogs.com/ecoflex/p/9789965.html