标签:install log from ros alt port end src new
English:listening、speaking、reading、writing、translation
1. Do not, for one repulse, give up the purpose that you resolved to effect.
2. The most beautiful is not rain, but the eaves with which you have escaped the rain.
3. If the world seems cold to you, kindle fires to warm it.
4. May there be enough clouds in your life to make a beautiful sunset.
5. Precious things are very few in this world, so there is only one you.
6. The spring breeze brings warmth and new life. All things are not as good as you are.
7. Life is a long journey, do not waste time, for those willing to walk hand in hand with you.
8. Those who bring sunshine to the lives of others cannot keep it from themselves .
9. When you feel like giving up, remember why you held on for so long in the first place.
paper
1. Service robot communication systems and system self-configuration (https://patents.google.com/patent/US10040201B2/en)
ros
1. Introduction to ROS (http://lsi.vc.ehu.es/pablogn/investig/ROS/ROS-arduino.pdf)
2. A Gentle Introduction to ROS
3. gazebo_ros_pkgs (http://wiki.ros.org/gazebo_ros_pkgs)
gazebo_ros_pkgs is a set of ROS packages that provide the necessary interfaces to simulate a robot in the Gazebo 3D rigid body simulator for robots. It integrates with ROS using ROS messages, services and dynamic reconfigure.
Some of the features of gazebo_ros_pkgs include:
Many simulated sensors available and ready to work
4. connect to Gazebo with ROS (http://gazebosim.org/tutorials?cat=connect_ros)
(1) ROS overview (http://gazebosim.org/tutorials?tut=ros_overview&cat=connect_ros)
To achieve ROS integration with stand-alone Gazebo, a set of ROS packages named gazebo_ros_pkgs provides wrappers around the stand-alone Gazebo. They provide the necessary interfaces to simulate a robot in Gazebo using ROS messages, services and dynamic reconfigure Some features of gazebo_ros_pkgs:
ros_control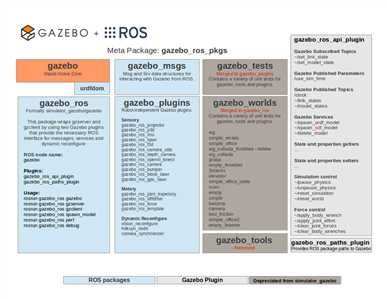
(2) Installing gazebo_ros_pkgs (http://gazebosim.org/tutorials?tut=ros_installing&cat=connect_ros)
5. Robot Operating System Tutorial (http://lsi.vc.ehu.es/pablogn/investig/ROS/meger_ros_tutorial_slides.pdf)
Turtlebot3 tutorial
1. Robotis and OSRF Announce TurtleBot 3: Smaller, Cheaper, and Modular
标签:install log from ros alt port end src new
原文地址:https://www.cnblogs.com/sancai16888/p/9864680.html