标签:pxc byte 技术 api 一段 文件中 let func 而且
前言:
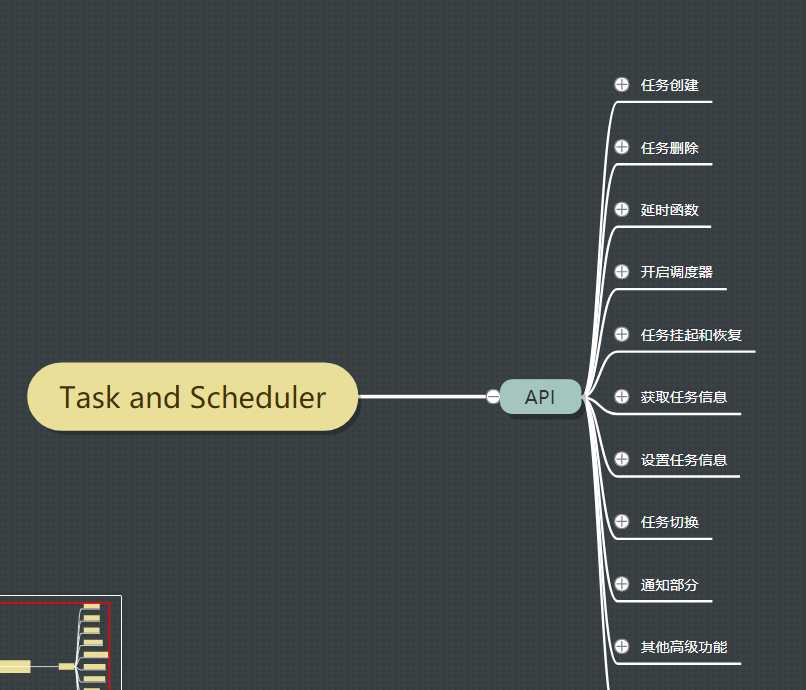
Task.c和Task.h文件内是FreeRTOS的核心内容,所有任务和调度器相关的API函数都在这个文件中,它包括下图这些内容FreeRTOS文件如下:

Task.c和Task.h文件内是FreeRTOS的核心内容,所有任务和调度器相关的API函数都在这个文件中,它包括下图这些内容
在开始介绍函数之前,首先我们先简单了解一下任务状态:
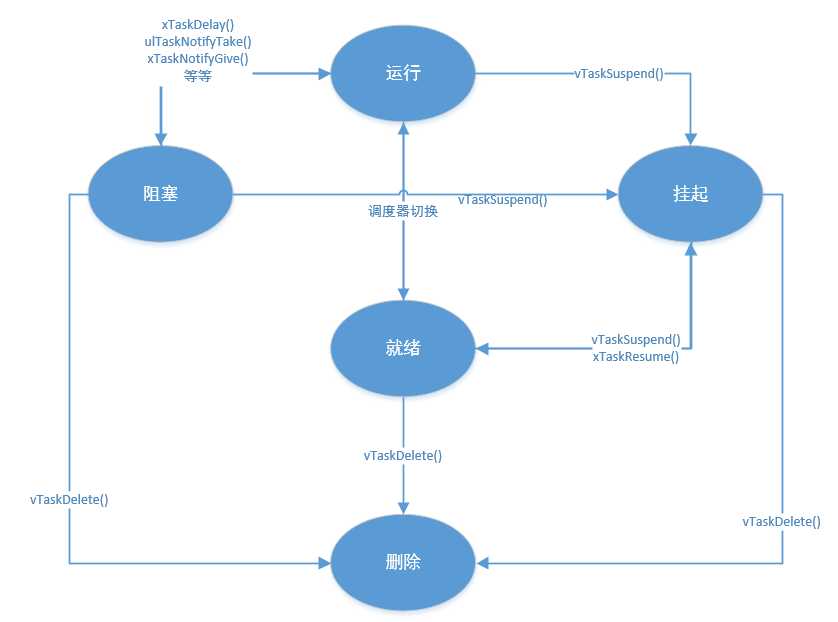
? FreeRTOS的任务5种状态:

- 运行状态:当前正在执行的任务的状态,只可能会一个当前正在执行的任务
- 就绪状态:随时可以运行的任务的状态,就绪状态任务随时等待调度器调度
- 阻塞状态:任务因为某些原因暂时不能被调度状态,一般情况下正在等待某些事件的发生比如调用了xTaskDelay()在一段时间内任务会被阻塞,在这些事件达成后任务会自动回到就绪状态。
- 挂起状态:vTaskSuspend()函数会让任务进入挂起状态,这时候这个任务不会执行。调用xTaskResume()函数才能让这些任务回到就绪状态
- 删除状态:一个任务被使用vTaskDelete()函数后被删除,处于删除状态。
他们之间的状态切换如下示意图:
这本篇中,主要介绍一下这6个部分:

一、创建任务:
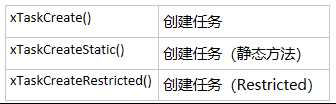
- 顾名思义,这些函数的作用是创建一个任务,创建的任务会进入就绪状态,如果没其他更高优先级的任务运行,则马上进入运行状态
- 这些函数可以在调度器启动前或启动后调用
1.1、vTaskCreate()
1.1.1、函数简介

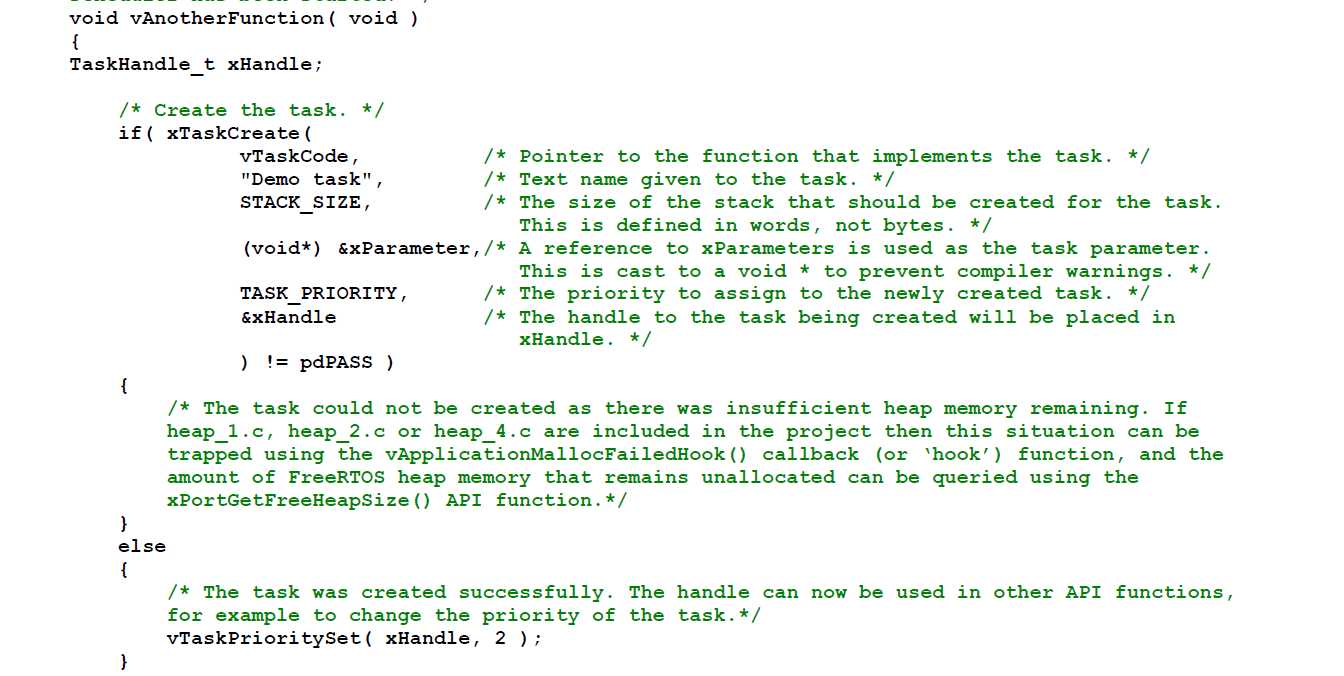
几个比较重要的输入参数介绍一下:
- pvTaskCode:直接指向函数的本体的指针,可以把任务函数名字直接贴过来
- usStackDepth:任务内申请的局部变量会使用到任务的堆栈空间,(在32位系统中,这个参数的单位是word=4byte),例如这个参数设置为100,那么这个任务将会申请到400byte的空间。
- uxPriority:任务优先级,使用这个参数来设置任务优先级(0是最低优先级),在FreeRTOSConfig.h 中调整configMAX_PRIORITIES的定义可以设置最高可用的优先级(最高可设置优先级为configMAX_PRIORITIES-1)。高优先级的任务可以抢断低优先级的任务,(主要:记得高优先级的任务不需要用的时候将其阻塞或挂起或删除,否则低优先级的任务可能永远无法得到运行权)
- pxCreatedTask:句柄的地址,以后使用其他API功能来索引这个任务时会需要用到(注意:这里传入的是句柄的地址!)
1.1.2、使用简介:
以下是官方例子:
1.2、vTaskCreateStatic()
1.2.1、函数简介

为了方便我们自己管理内存,有了静态创建任务法,任务堆栈的创建和回收都要由编程者来处理,与vTaskCreate()对比,我们可以发现以下不同之处:
- puxStackBuffer参数:任务需要用到的堆栈数组的地址,我们只需要创建一StackType_t类型个空的数组,然后把数组指针传进来就好了(注意数组的大小要大于ulStackDepth)
- pxTaskBuffer参数:存放任务数据结构(TCB)的变量,同样的,我们创建一个StaticTask_t类型的变量,然后把他的指针传进来
- 还有一处不同,输入参数的句柄取消掉了,但是句柄还是存在的,只是变为了返回参数
1.2.2、使用简介
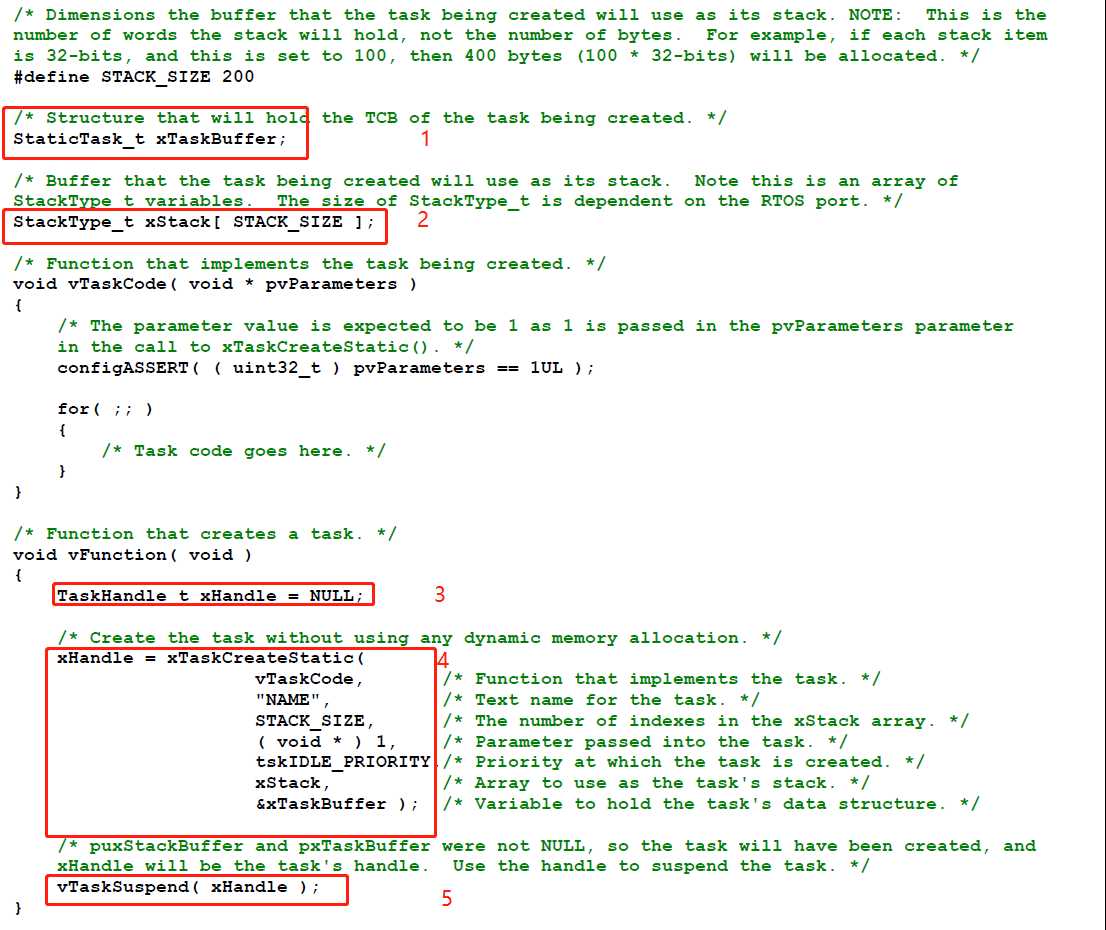
官方例程如下:
- 创建一个StaticTask_t 类型的参数,稍后用于存放任务数据结构(TCB)
- 创建一个StackType_t类型数组,稍后用于作为任务堆栈
- 创建一个句柄,稍后用作vTaskCode任务的句柄
- 使用xTaskCreateStatic()创建任务
- 使用vTaskSuspend()、并通过传入句柄挂起刚刚创建的任务,目的是展示给我们看这个任务的句柄是可用的
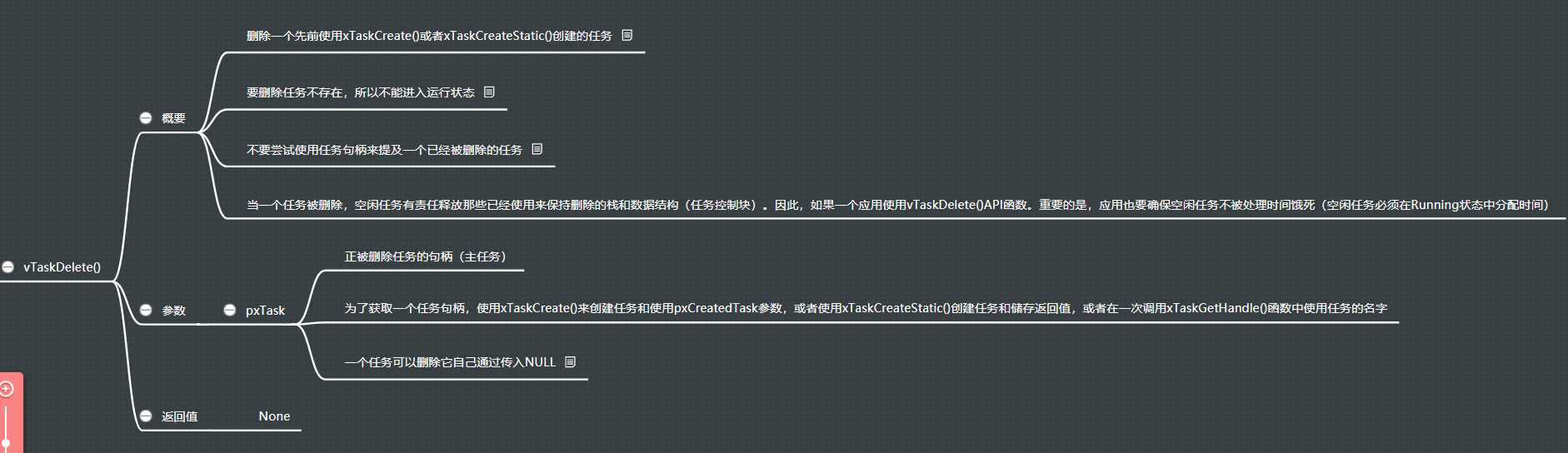
二、删除任务:
2.1、参数简介
2.2、使用简介
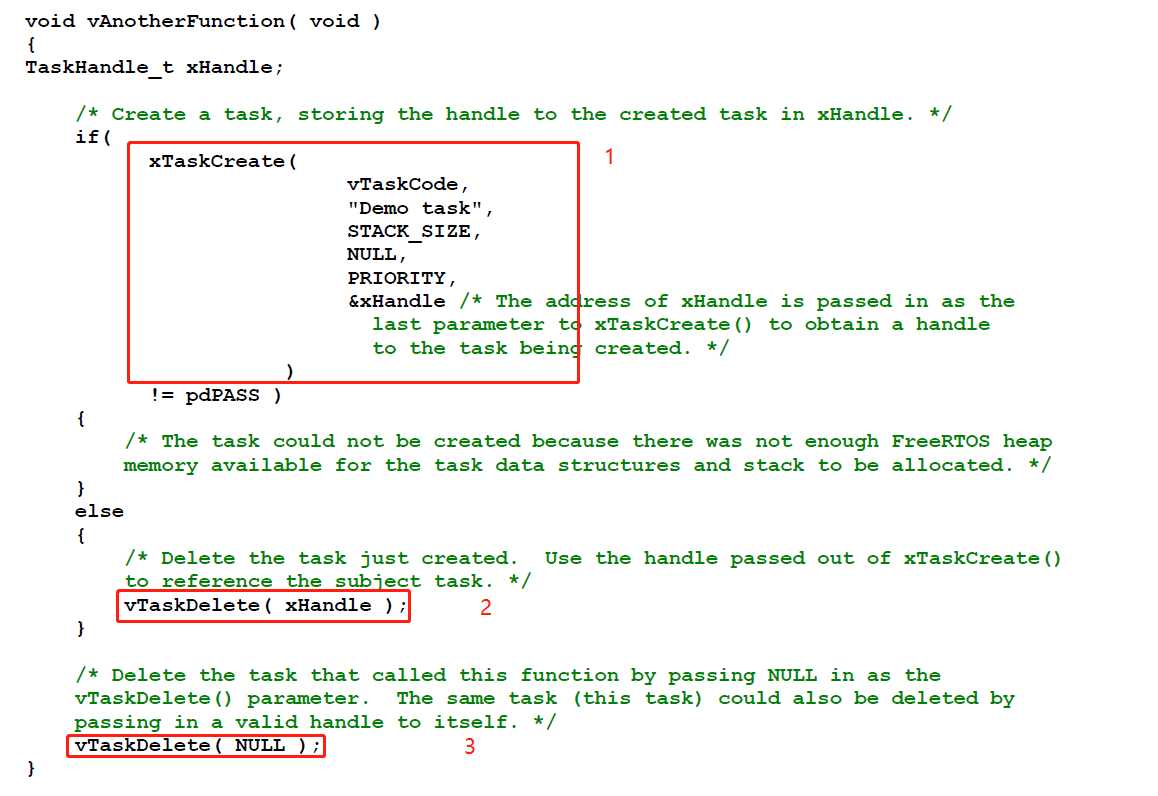
下面是官方例子:
- 在当前任务中,用xTaskCreate()创建另一个任务B
- 如果任务B创建成功,使用vTaskDelete(任务句柄)删除掉任务B。
- 用vTaskDelete(NULL)删除掉当前任务,目的是展示给我们看通过传入NULL可以删除当前任务
三、延时函数:
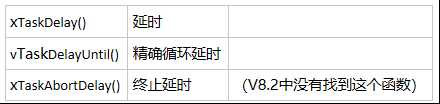
3.1、vTaskDelay()
3.1.1、函数简介
xTaskDelay()
- 让调用这个函数的任务在一定时间内进入阻塞状态,时间到达后会切换回来这个任务。
- 如果输入参数为0,那么这个任务不会阻塞,但是会切换
*这个函数只有一个输入参数,但需要注意一下它是以tick时钟的中断次数为单位的(并不是以毫秒为单位):


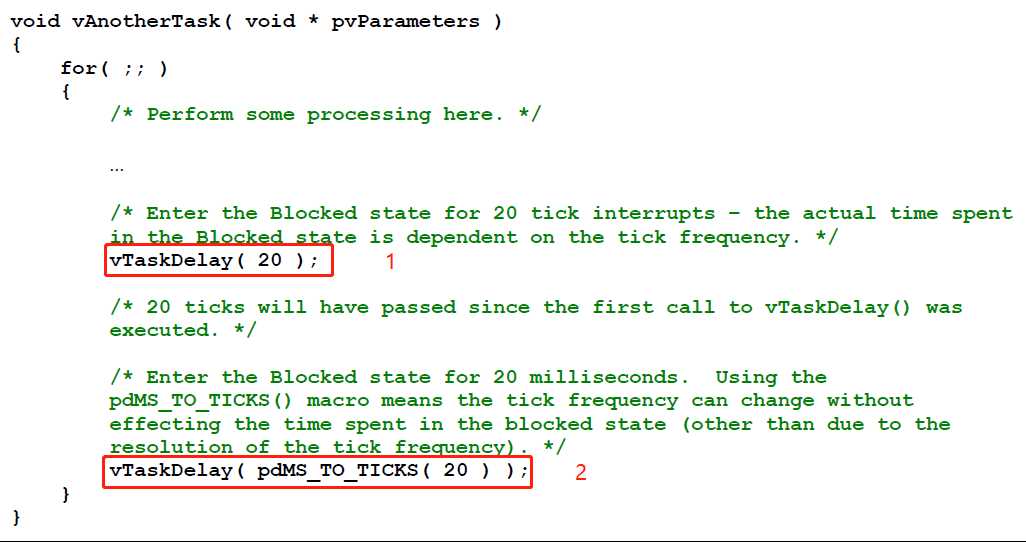
3.1.2、使用简介
下面是官方的例子
其中两处vTaskDelay()
- 延时20个tick时间片
- 延时20ms。(pdMS_TOTICKS()可以把ms时间换成tick为单位)
3.2、vTaskDelayUntil()
3.2.1、函数简介
- 让任务进入阻塞状态等待实际那到达,是精确的绝对时间
- 周期性任务能够使用vTaskDelayUntil()来达到连续的执行频率
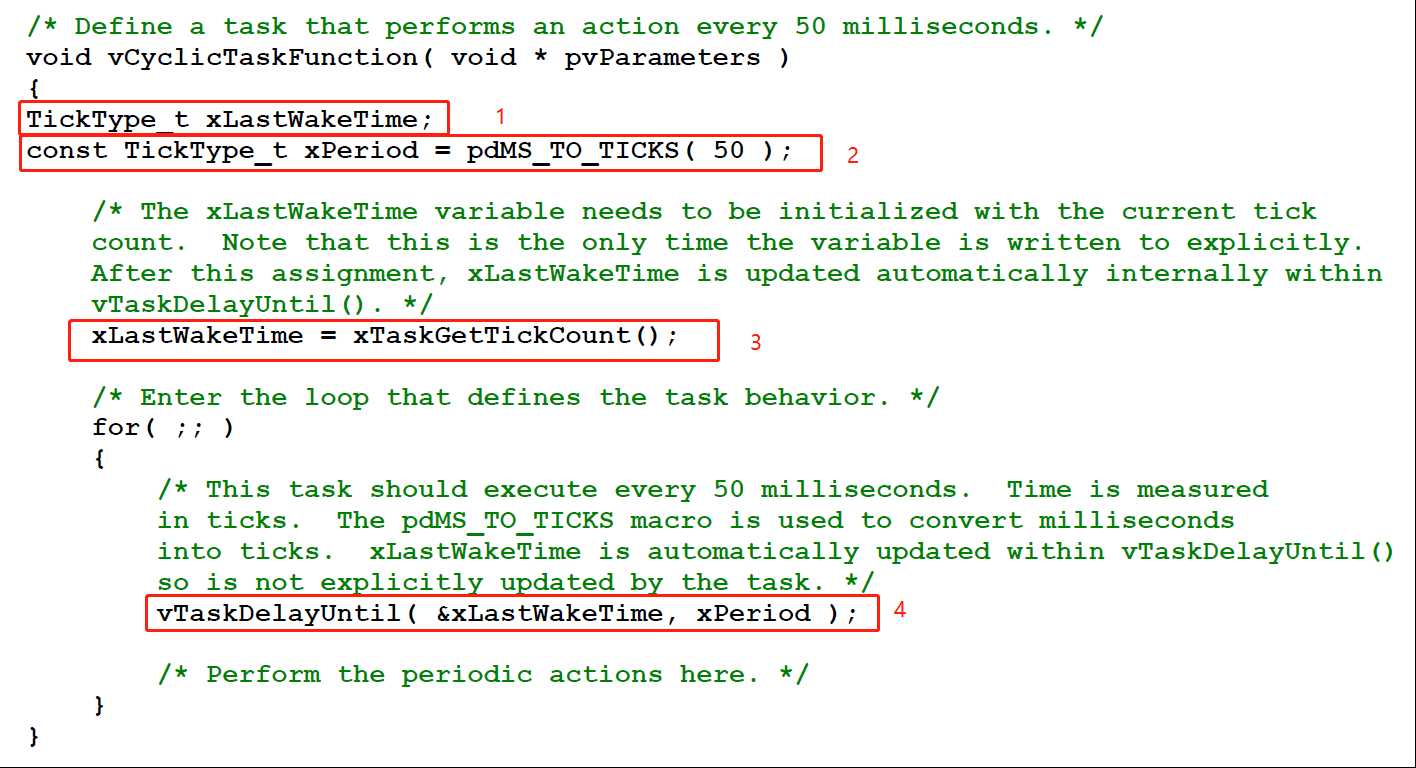
3.2.2、使用简介
以下是官方的例子:
- 创建一个TickType_t类型的变量,用于记录上一次系统时间
- 用pdMS_TO_TICKS()函数把50ms转换为tick为单位,方便等下给vTaskDelayUntil调用
- 初始化第一步中的变量,在这一步后,这个变量不用再手动更新(vTaskDelayUntil()会更新它)
- 使用vTaskDelayUntil()、传入刚刚的参数,制造50ms固定时间的循环
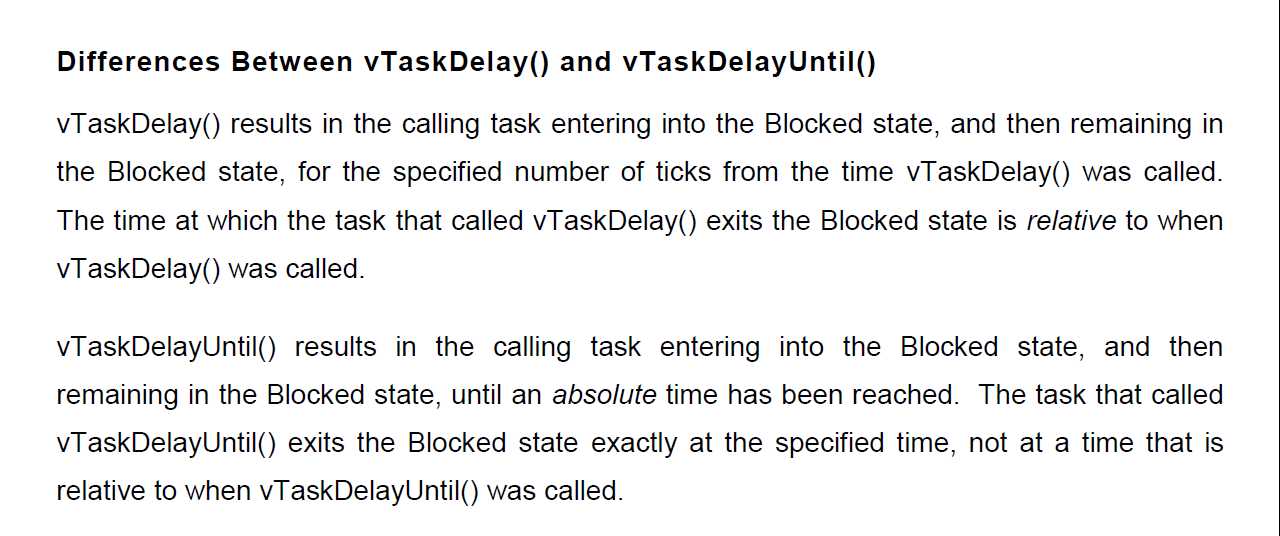
3.3、重要对比
vTaskDelay()和vTaskDelayUntil()的不同之处
我们可以直接翻译一下官方手册的描述:

举个例子:
以下两个任务分别用vTaskDelay()和vTaskDelayUntil()来实现延时功能:
思考一个问题: 任务A 和任务B都能实现LED闪烁,那么A 和 B任务的LED端口多少毫秒翻转一次 ?
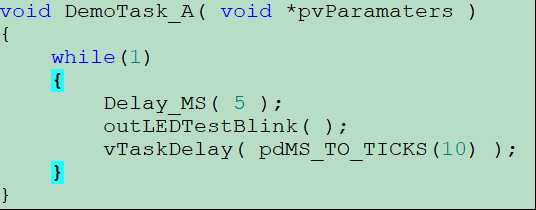
任务A:
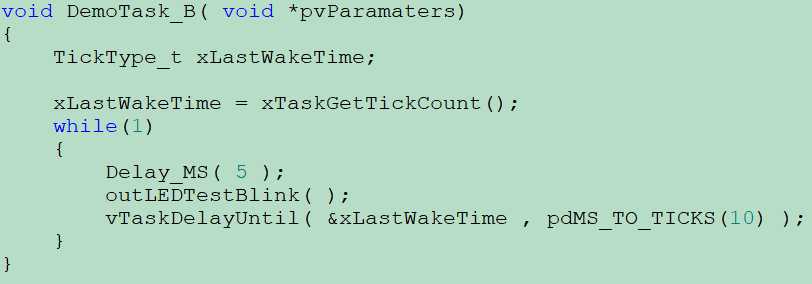
任务B:
- 任务A中,LED端口15毫秒翻转一次
- 任务B中,LED端口10毫秒翻转一次
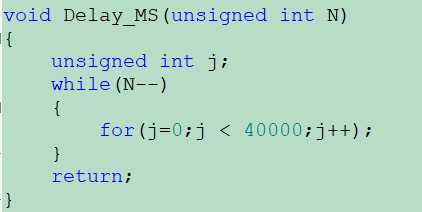
*注意:Delay_MS()是一个自定义的函数,用来模拟任务中处理其他东西浪费了5ms。
两个任务都是 TaskDelay(10毫秒) ,但是任务A中使用vTaskDelay(),在任务B中使用vTaskDelayUntil()。
在任务A中:vTaskDelay()是从调用的那一刻开始算,那么这个任务本身在Delay_MS中占用了5MS,LED翻转的时间忽略不计,那么加上vTaskDelay()的10MS,就是15MS。
在任务B中:vTaskDelayUntil()和任务本身执行时间无关,只要任务每次循环执行的总时间少于10ms,那么这个任务就是10ms执行一次了。
最后提一下xTaskAbortDelay()这个函数,根据描述,他能让正在阻塞状态等待延时的函数马上切出,进入就绪状态。但由于我的库版本比较旧,没有这个函数,所以就不作更多的介绍了。
四、开启调度器

4.1、函数简介:
这个函数作用是开启调度器,调用这个函数后任务就会开始执行。所以在整个程序中只需要调用一次,一般在main函数中调用就可以了。开启成功的话,系统由调度器接管了,main函数中vTaskStartScheduler()后面的代码都不会被执行。
4.2、使用简介:
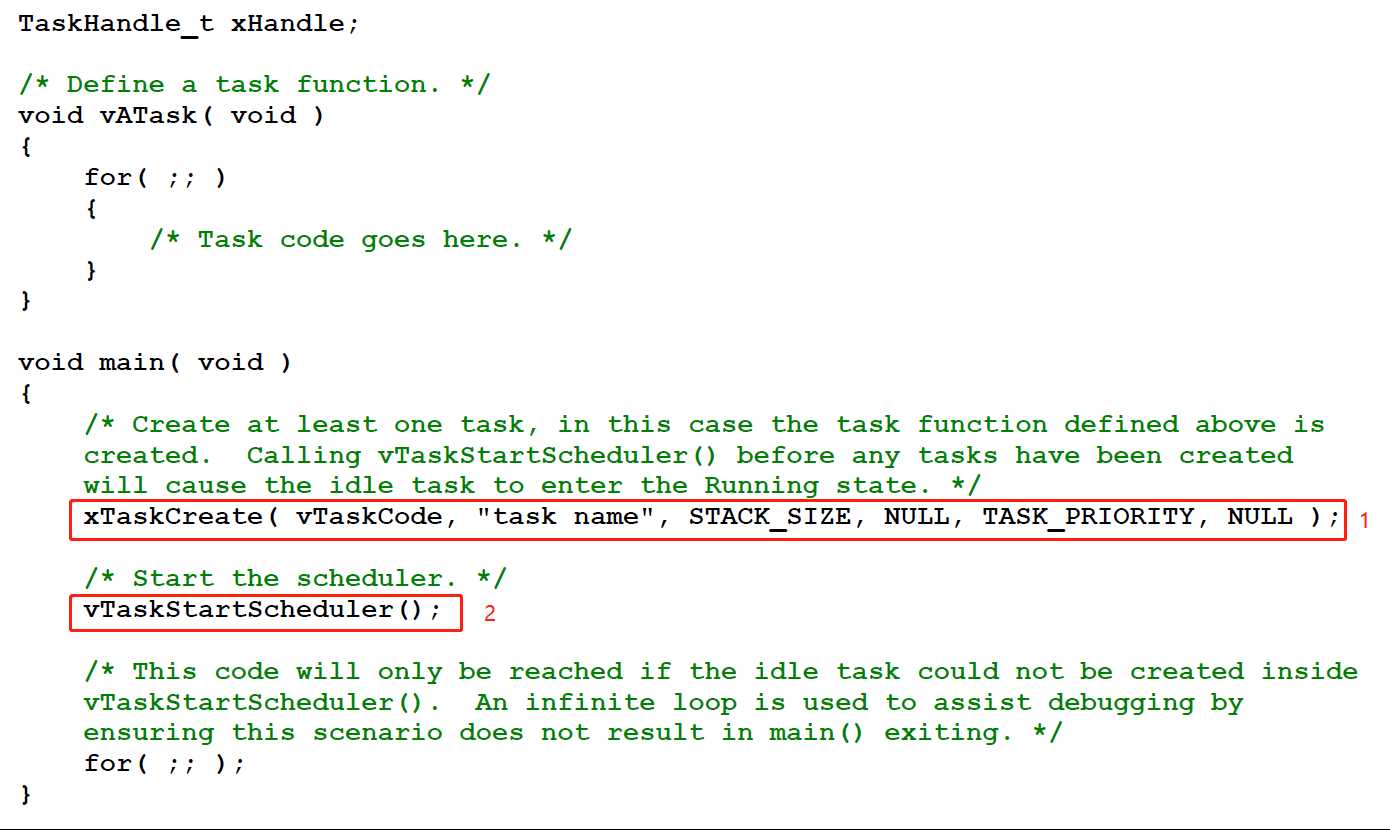
官方的例子:
- 创建任务
- 开启调度器,开启后程序会跳转到vATask()任务中
五、任务的挂起和恢复
5.1、vTaskSuspend() 和 vTaskResume()
5.1.1、函数简介:
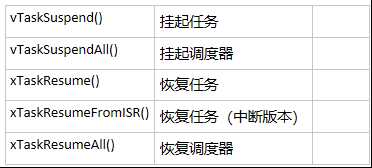
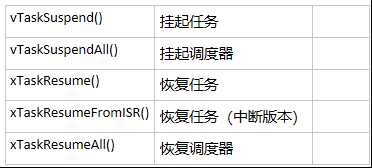
挂起/解除挂起单个任务:
- vTaskSuspend的函数是让指定的任务进入挂起状态
- xTaskResume的函数是让指定的任务从挂起状态换为就绪状态。
- xTaskResumeFromISR()是xTaskResume()适合在中断中调用的版本
5.1.2、使用简介
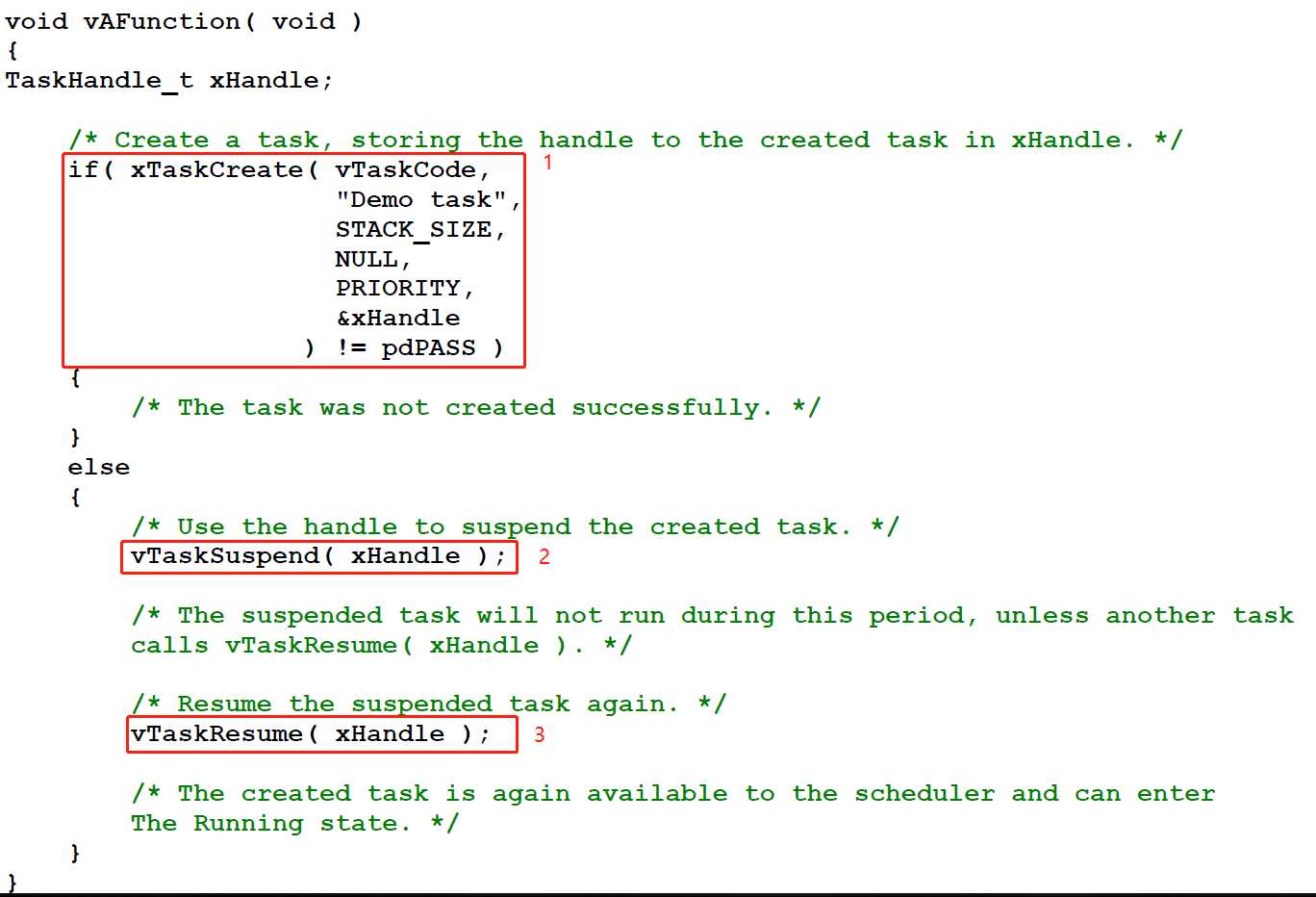
使用很简单,当不需要用某个任务的时候用vTaskResume(句柄) 把那个任务挂起,需要用的时候再打开就行了,下面是官方的例程,实现了这三步:
- 使用xTaskCreate()创建任务
- 创建成功的话使用vTaskSuspend()把刚刚创建的任务转换为挂起状态(该任务将不会再得到执行)
- 使用vTaskResume()让刚刚挂起的任务转为就绪状态
5.2、vTaskSuspendAll()和vTaskResumeAll()
5.2.1、函数简介:
vTaskSuspendAll()挂起调度器 对应 xTaskResumeAll()解除挂起调度器:
? vTaskSuspendAll()挂起调度器后,只有当前任务在继续执行,不会发生任务切换了。
? xTaskResumeAll()对应vTaskSuspendAll()恢复调度器。
这个函数的作用之一在于,可以保证一些不能被分的程序执行,因为挂起调度器保证了不会被高优先级的任务强调(注意调度器挂起后中断还是可以运行的,如果要保证时效,还得把中断关闭)
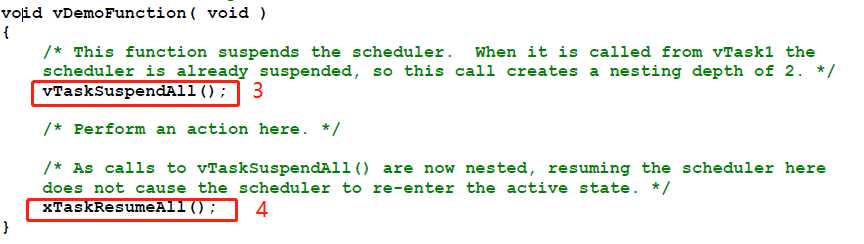
注意:vTaskSuspendAll()是可以递归调用的,这意味着调用了多少次vTaskSuspendAll(),就必须有多少此vTaskResumeAll()的调用才能让调度器恢复。这个情况以下的例子中很好地体现了。
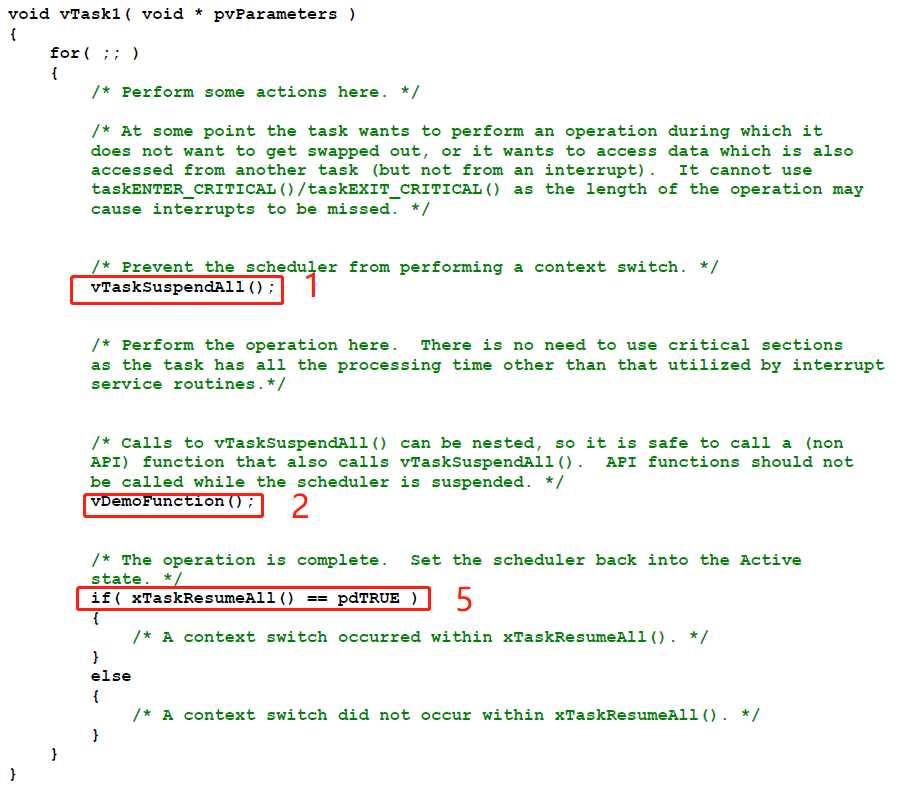
5.2.2、使用简介
- 在任务vTask1中第一此调用vTaskSuspendAll(),此时调度器被挂起,不会发生任务切换
- 调用另一个用作例子的vDemoFunction()
- 第二次调用vTaskSuspendAll(),此时调度器再次被挂起,而且挂起计数增加到2
- 第一次调用vTaskResumeAll(),此时调度器挂起计数减少为1,但是调度器仍然处于挂起状态
- 第二次调用vTaskResumeAll(),调度器计数为0,调度器恢复运行,后面会发生任务切换了
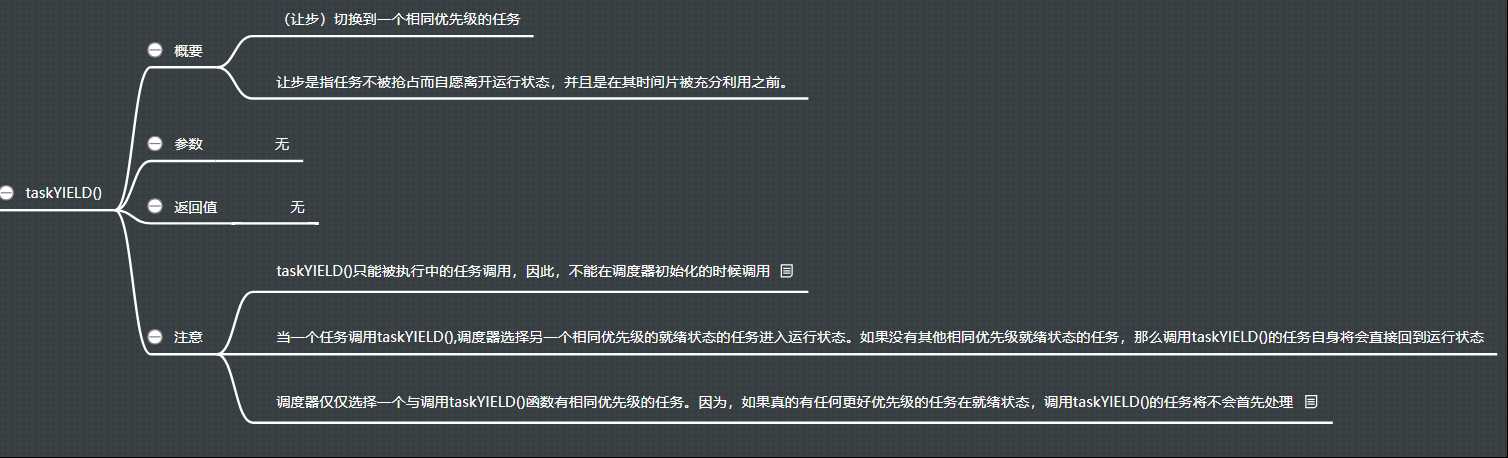
六、任务切换

6.1、函数简介
- 在一个运行的任务中调用taskYIELD(),那么这个任务会被降级为就绪状态,调度器会选择另一个相同优先级的就绪任务执行。(如果没有相同优先级的任务就绪,那么这个任务将不会切换,会继续执行。
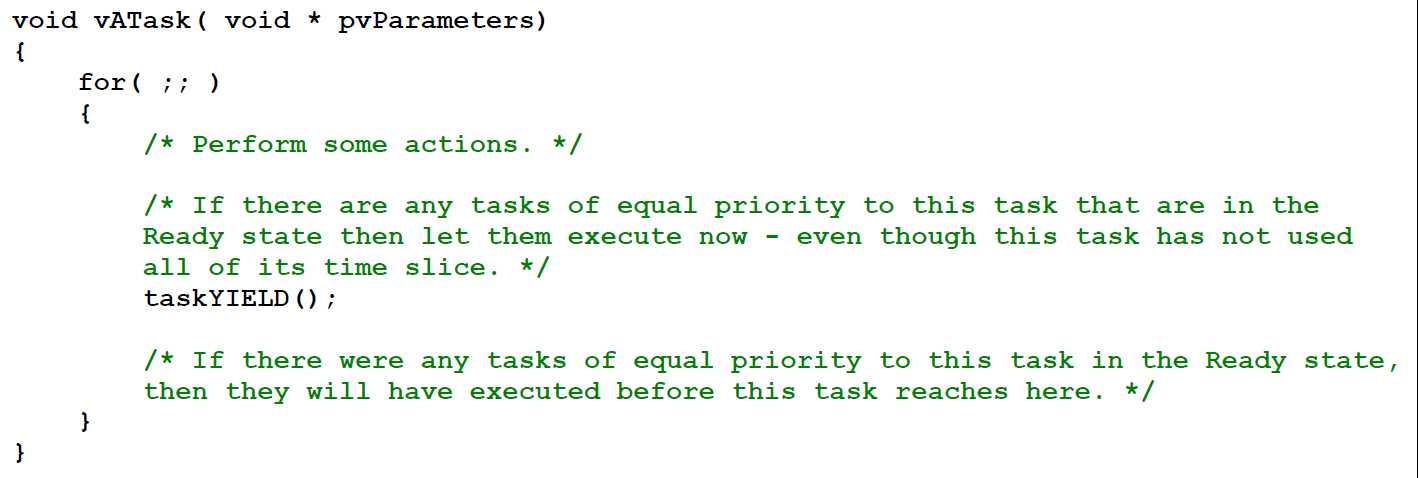
6.2、使用简介
我们来看官方例子:
- 在调用taskYIELD()后,vATask这个任务会马上"让步",进入就绪状态等待,等待下次得到调度器调度的时候,会执行taskYIELD()下面的代码
在下一节中,我们会继续介绍task中的通知和其他内容
FreeRTOS 任务与调度器(1)
标签:pxc byte 技术 api 一段 文件中 let func 而且
原文地址:https://www.cnblogs.com/HongYi-Liang/p/9901242.html