标签:调度 模拟 图片 auto 参考 nal 故障 根据 监控
参考:《智能控制》——刘金琨
1、智能控制的概念
智能控制是一门交叉学科,著名美籍华人傅京逊教授1971年首先提出智能控制是人工智能与自动控制的交叉,即二元论。美国学者G.N.Saridis1977年在此基础上引入运筹学,提出了三元论的智能控制概念,即:
IC=AC∩AI∩OR
式中各子集的含义为
IC——智能控制(Intelligent Control)
AI——人工智能(Artificial Intelligence)
AC——自动控制(Automatic Control)
OR——运筹学(Operational Research)
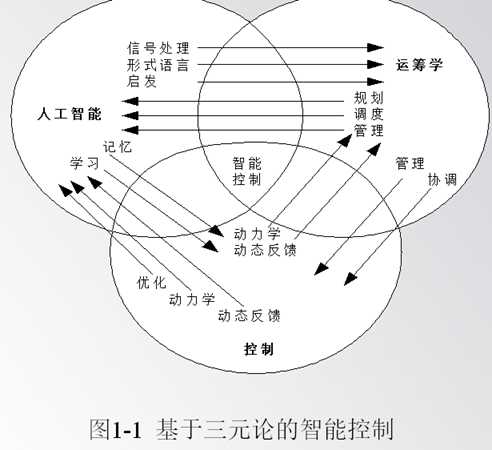
人工智能(AI)是一个用来模拟人思维的知识处理系统,具有记忆、学习、信息处理、形式语言、启发推理等功能。
自动控制(AC)描述系统的动力学特性,是一种动态反馈。
运筹学(OR)是一种定量优化方法,如线性规划、网络规划、调度、管理、优化决策和多目标优化方法等。
三元论除了“智能”与“控制”外还强调了更高层次控制中调度、规划和管理的作用,为递阶智能控制提供了理论依据。
所谓智能控制,即设计一个控制器(或系统),使之具有学习、抽象、推理、决策等功能,并能根据环境(包括被控对象或被控过程)信息的变化作出适应性反应,从而实现由人来完成的任务。
2、控制科学发展过程和分类
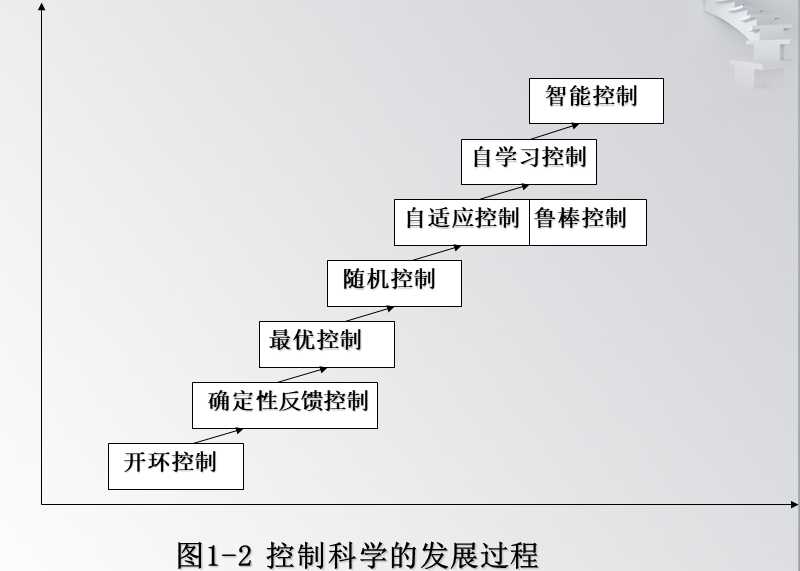
1971年,傅京逊首次提出智能控制这一概念,并归纳了三种类型的智能控制系统:
(1)人作为控制器的控制系统:人作为控制器的控制系统具有自学习、自适应和自组织的功能;
(2)人—机结合作为控制器的控制系统:机器完成需要连续进行的并需快速计算的常规控制任务,人则完成任务分配、决策、监控等任务;
(3)无人参与的自主控制系统:为多层的智能控制系统,需要完成问题求解和规划、环境建模、传感器信息分析和低层的反馈控制任务。如自主机器人。
3、智能控制的特点
(1)学习功能:智能控制器能通过从外界环境所获得的信息进行学习,不断积累知识,使系统的控制性能得到改善;
(2)适应功能:智能控制器具有从输入到输出的映射关系,可实现不依赖于模型的自适应控制,当系统某一部分出现故障时,也能进行控制;
(3)自组织功能:智能控制器对复杂的分布式信息具有自组织和协调的功能,当出现多目标冲突时,它可以在任务要求的范围内自行决策,主动采取行动。
(4)优化能力:智能控制能够通过不断优化控制参数和寻找控制器的最佳结构形式,获得整体最优的控制性能。
4、智能控制的研究工具
(1)符号推理与数值计算的结合
例如专家控制,它的上层是专家系统,采用人工智能中的符号推理方法;下层是传统意义下的控制系统,采用数值计算方法。
(2)模糊集理论
模糊集理论是模糊控制的基础,其核心是采用模糊规则进行逻辑推理,其逻辑取值可在0与1之间连续变化,其处理的方法是基于数值的而不是基于符号的。
(3)神经元网络理论
神经网络通过许多简单的关系来实现复杂的函数,其本质是一个非线性动力学系统,但它不依赖数学模型,是一种介于逻辑推理和数值计算之间的工具和方法。
(4) 遗传算法
遗传算法根据适者生存、优胜劣汰等自然进化规则来进行搜索计算和问题求解。对许多传统数学难以解决或明显失效的复杂问题,特别是优化问题,GA提供了一个行之有效的途径。
(5)离散事件与连续时间系统的结合
主要用于计算机集成制造系统(CIMS)和智能机器人的智能控制。以CIMS为例,上层任务的分配和调度、零件的加工和传输等可用离散事件系统理论进行分析和设计;下层的控制,如机床及机器人的控制,则采用常规的连续时间系统方法。
标签:调度 模拟 图片 auto 参考 nal 故障 根据 监控
原文地址:https://www.cnblogs.com/long5683/p/9955573.html