标签:eve pre lte cal res ssi lock seq rmi
ref: Curb-Intersection Feature Based Monte Carlo Localization on Urban Roads
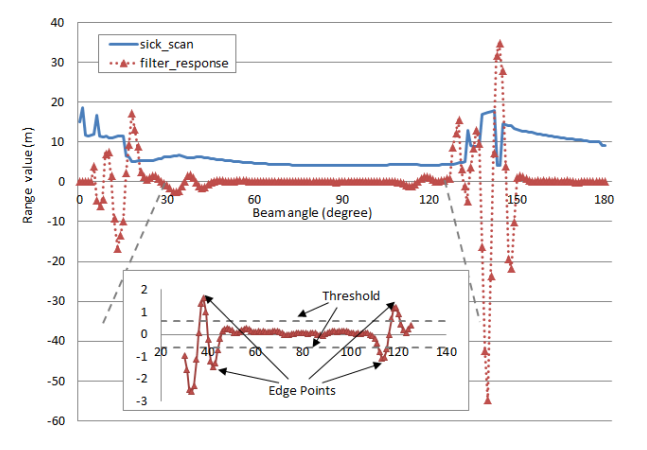
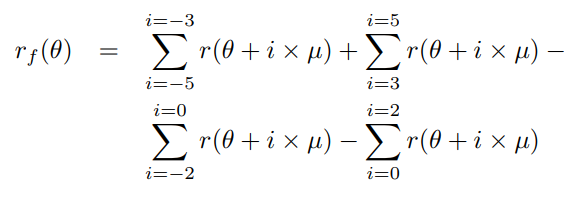
we can think this as, after discussion woth Peng, we believe it‘s one-order differential function(the same in the picture, red curve):

标签:eve pre lte cal res ssi lock seq rmi
原文地址:https://www.cnblogs.com/jsrgfjz/p/9969687.html