标签:右键 wiki 14.04 pre 新源 重新安装 开始 分享 安装软件包
删除比较容易: sudo apt-get remove ros-jade-desktop-full
但是如果怕删不干净可以采用: sudo apt-get remove ros-* ,但是不确定会不会删除其它不必要的包。
然后按照 ROS wiki 上面的步骤开始重新安装ubuntu14.04 ros-indigo:
sudo sh -c ‘echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list‘
或者中科大ROS源
sudo sh -c ‘. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list‘
三、安装软件包授权密钥
# wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
四、下载软件包列表
# sudo apt-get update
五、安装 ROS 软件包
# sudo apt-get install ros-indigo-desktop-full
这步是最常出现无法下载软件包的,首先重复第四第五步,如果还不行,可以再次更新源来解决问题。
六、初始化 rosdep (rosdep可以方便在需要编译某些源码的时候为其安装一些系统依赖,也是某些ROS核心功能组件所必需用到的工具)
# sudo rosdep init # rosdep update
sudo apt-get install python-rosinstall
七、添加 ROS 的环境变量 (添加ROS的环境变量,打开新的shell时,bash会话中会自动添加环境变量)
# echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
# source ~/.bashrc
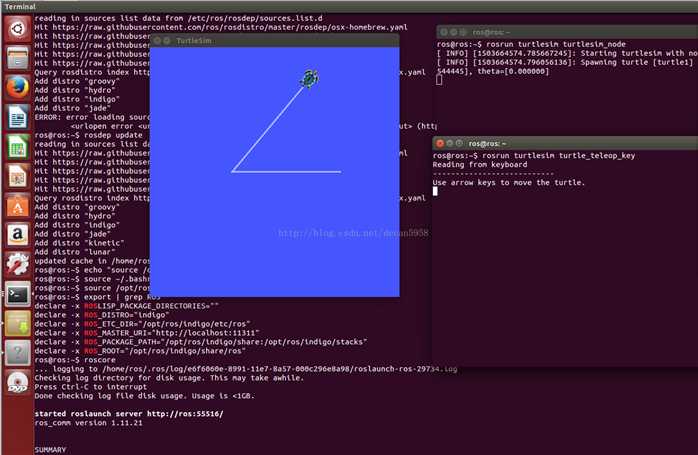
八、测试ROS
启动 turtlesim 在三个不同的终端中,分别执行以下三个指令:
roscore
rosrun turtlesim turtlesim_node rosrun turtlesim turtle_teleop_key
可以通过键盘的上下左右键盘实现小乌龟的移动,则成功了。
标签:右键 wiki 14.04 pre 新源 重新安装 开始 分享 安装软件包
原文地址:https://www.cnblogs.com/flyinggod/p/9993788.html