标签:ocr 摄像机 黑白 混合高斯 开始 垂直 背景 连通 浙大
综合网上上各种车牌识别方法,总结出一个较为简单的车牌识别方案,采用VS2013+OpenCv2.4.9实现。并且附上可运行的源代码以及测试图片和视频,详细参数设置请参照源代码。识别部分的训练样本见我上传的资源。实现方法
(一) 检测车辆(基于混合高斯模型的背景差分法)
读取视频(avi格式),选定目标区域框用于检测车辆
(二) 检测车牌区域(基于HSV颜色空间+形态学方法)
(1) 改变图片尺寸(480′320)得到resizeimg
(2) 转换为HSV空间,并在HSV空间直方图均衡化
(3) 在HSV空间检测蓝色区域,范围为(100,90,80)—(130,255,255),得到blueimg
(4) 对blueimg进行膨胀运算、开运算得到image1
(5) 对resizeimg灰度化
(6) 进行直方图均衡化
(7)中值滤波
(8)Canny算子边缘检测
(9)进行开运算、闭运算得到image2
(10)对HSV空间检测蓝色分量的image1和边缘检测得到的image2进行按位与得到andimage
(11)对andimage进行膨胀运算
(12)寻找最大连通域
(13)圈出最大连通域所在的矩形区域并切割得到ROIimage
(1)对ROIimage转换蓝色空间并均衡化
(2)检测蓝色区域,范围为(100,90,90)—(140,255,255)
(3)框出非零点集所在的最大矩形区域并切割得到roimage
(4)Canny算子检测roimage并利用hough变换进行水平倾斜校正得到houghimage
(5)对houghimage进行灰度化、二值化(浙大张引二值化)
(6)对二值化车牌水平方向统计黑白跳变次数
(7)从车牌中间向上下搜索,若跳变次数小于14,设定为上下边界并切割,得到jingqueimage
(三) 车牌字符切割(投影法)
1.对对车牌进行垂直投影,求垂直方向投影平均值mean,设定投影特征值TZ=0.63′mean
2.先从第三个字符开始切割,选择车牌宽度的0.3倍处作为起始点,向右寻找大于TZ的点作为上升点,从上升点向左搜索投影值等于0的点作为字符起点,寻找上升点后下一个等于0的点作为终点,切割出该部分,对该部分扩充调整其宽高比为0.5,对其归一化16*32,二值化得到字符
3.第四个到第七个字符的切割方法与第三个字符相同
切割第二个字符,选择车牌宽度的0.35处作为起始点,向左寻找大于特征值的点作为上升点,从上升点向左搜索投影值等于0的点作为字符起点,寻找上升点左边下一个等于0的点作为终点,切割出该部分,对该部分扩充调整其宽高比为0.5,对其归一化16′32,二值化得到字符
(四) 车牌识别(BP神经网络)
(1)网络层数:输入层:560 隐含层:132 输出层:31
(2)激活函数:Sigmoid函数
(3)神经网络的训练参数:
a) 最大迭代次数:10000
b)误差最小值:0.001
c) 权值更新率:0.07
d) 权值更新冲量:0.07
(4)输入样本:
a) 特征提取:512个像素点+32个水平投影值+16个竖直投影值共560维
b) 训练样本数:所有省份样本共1195个
(5) 输出结果:输出层共31个,如“京”:0.9,,0.1……0.1,选取输出的31个值的最大的值为识别结果
(6) 对汉字识别:提取特征并进行预测,输出省份
(1)网络层数:输入层:560 隐含层:117 输出层:24
(2)激活函数:Sigmoid函数
(3)神经网络的训练参数:
a) 最大迭代次数:30000
b) 误差最小值:0.001
c) 权值更新率:0.07
d) 权值更新冲量:0.07
(4)输入样本:
a) 特征提取:512个像素点+32个水平投影值+16个竖直投影值共560维
b) 训练样本数:所有省份样本共1200个
(5)输出结果:输出层共24个,如“A”:0.9,,0.1……0.1,选取输出的24个值的最大的值为识别结果
(6) 对字母识别:提取特征并进行预测,输出字母
(1)网络层数:输入层:560 隐含层:139 输出层:34
(2)激活函数:Sigmoid函数
(3)神经网络的训练参数:
a) 最大迭代次数:30000
b) 误差最小值:0.001
c) 权值更新率:0.06
d) 权值更新冲量:0.06
(4)输入样本:
a) 特征提取:512个像素点+32个水平投影值+16个竖直投影值共560维
b) 训练样本数:所有省份样本共5100个
(5)输出结果:输出层共34个,如“A”:0.9,,0.1……0.1,选取输出的34个值的最大的值为识别结果
(6)对字母和数字识别:提取特征并进行预测,输出字母
总结
采用基于视频检测的车牌识别系统,测试的场合是小区门禁处静止摄像机,实现对行驶的车辆进行车牌识别。从功能划分可以分为三块,车辆的视频检测、车牌的定位和车牌字符的分割与识别。
由于交通场景的复杂性和多样性,本设计有许多值得进一步研究的地方,主要有以下几个方面:
本设计的计算速度较慢,尚未能满足实时性的要求。
在车牌定位模块,对于截取图片中的车辆的距离有一定要求,车辆占比区域太大会造成车牌定位不准的情况。
在字符分割模块,基于大多车牌字符都没有粘连,本设计采用的投影法。对于字符粘连的车牌会出现分割错误。
关于车牌识别的工作原理和技术参数
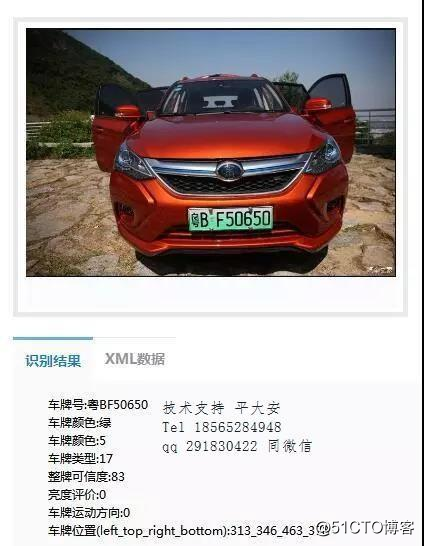
作者:平大安,欢迎百度搜索“ocr识别平大安”/“车牌识别平大安”联系调取接口测试。
标签:ocr 摄像机 黑白 混合高斯 开始 垂直 背景 连通 浙大
原文地址:http://blog.51cto.com/14052826/2321330