标签:pes isp 大量 http _for family red puts play
DeepDream是一种艺术性的图像修改技术,它用到了卷积神经网络学到的表示,DeepDream由Google于2015年发布。这个算法与卷积神经网络过滤器可视化技术几乎相同,都是反向运行一个卷积神经网络:对卷积神经网络的输入做梯度上升,以便将卷积神经网络靠顶部的某一层的某个过滤器激活最大化。但有以下几个简单的区别:
我们将从一个在ImageNet上预训练的卷积神经网络(Keras内置的Inception V3模型)开始
#加载预训练的Inception V3模型
from keras.applications import inception_v3
from keras import backend as K
#我们不需要训练模型,所以这个命令会禁用
K.set_learning_phase(0)
#构建不包括全连接层的Inception V3网络。使用预训练的ImageNet权重来加载模型
model = inception_v3.InceptionV3(weights = ‘imagenet‘,include_top=False)
接下来要计算损失loss,即在梯度上升过程中需要最大化的量。在第五章的过滤器可视化中,我们试图将某一层的某个过滤器的值最大化。这里,我们要将多个层的所有过滤器的激活同时最大化。具体来说,就是对一组靠近顶部的层激活的L2范数进行加权求和,然后将其最大化。选择哪些层(以及它们对最终损失的贡献)对生成的可视化结果具有很大影响,所以我们希望让这些参数变得易于配置。更靠近底部的层生成的是几何图案,而更靠近顶部的层生成的则是从中能够看出某些ImageNet类别(比如鸟或狗)的图案。我们将随意选择4层的配置,但以后一定要探索多个不同的配置
# 设置DeepDream配置
layer_contributions={
‘mixed2‘:0.2,
‘mixed3‘:3.,
‘mixed4‘:2,
‘mixed5‘:1.5,
}
#这个字典将层的名称映射为一个系数,这个系数定量表示该层激活对你要最大化的损失的贡献大小。
# 注意,层的名称硬编码在内置的inception V3应用中
#定义需要最大化的损失
#创建一个字典,将层的名称映射为层的实例
layer_dict = dict([(layer.name,layer) for layer in model.layers] )
#在定义损失时将层的贡献添加到这个标量变量中
loss = K.variable(0.)
for layer_name in layer_contributions:
coeff = layer_contributions[layer_name] #该层激活对损失的贡献大小
activation = layer_dict[layer_name].output #获取层的输出
scaling = K.prod(K.cast(K.shape(activation),‘float32‘))
#将该层特征的L2范数添加到loss中,为了避免出现边界伪影,损失中仅包含非边界的像素
loss += coeff * K.sum(K.square(activation[:,2:-2,2:-2,:1])) / scaling
#梯度上升过程
#这个张量用于保存生成的图像,即梦境图像
dream = model.input
#计算损失相对于梦境图像的梯度
grads = K.gradients(loss,dream)[0]
#将梯度标准化(重要技巧)
grads /= K.maximum(K.mean(K.abs(grads)),1e-7)
#给定一张输出图像,设置一个keras函数来获取损失值和梯度值
outputs = [loss,grads]
fetch_loss_and_grads = K.function([dream],outputs)
def eval_loss_and_grads(x):
outs = fetch_loss_and_grads([x])
loss_value = outs[0]
grad_values = outs[1]
return loss_value,grad_values
#这个函数运行itertions次梯度上升
def gradient_ascent(x,iterations,step,max_loss=None):
for i in range(iterations):
loss_value,grad_values = eval_loss_and_grads(x)
if max_loss is not None and loss_value > max_loss:
break
print(‘...Loss value at‘,i,‘:‘,loss_value)
x += step * grad_values
return x
最后就是实际的DeepDream算法
首先,我们来定义一个列表,里面包含的是处理图像的尺度(也叫八度)。每个连续的尺度都是前一个的1.4倍(放大40%),即首先处理小图像,然后逐渐增大图像尺寸。对于每个连续的尺度,从最小到最大,我们都需要在当前尺度运行梯度上升,以便将之前定义的损失最大化。每次运行完梯度上升之后,将得到的图像放大40%。
在每次连续的放大之后(图像会变得模糊或像素化),为避免丢失大量图像细节,我们可以使用一个简单的技巧:每次放大之后,将丢失的细节重新注入到图像中。这种方法是可行的,因为我们知道原始图像放大到这个尺寸应该是什么样子。
给定一个较小的图像尺寸S和一个较大的图像尺寸L,你可以计算将原始图像大小调整为L与将原始图像大小调整为S之间的区别,这个区别可以定量描述从S到L的细节损失。
#辅助函数
import scipy
from keras.preprocessing import image
def resize_img(img,size):
img = np.copy(img)
factors=(1,
float(size[0])/img.shape[1],
float(size[1])/img.shape[2],
1)
return scipy.ndimage.zoom(img,factors,order=1)
def save_img(img,fname):
pil_img = deprocess_image(np.copy(img))
scipy.misc.imsave(fname,pil_img)
def preprocess_image(image_path):
img = image.load_img(image_path)#打开图片
img = image.img_to_array(img)#把图片转成array形式
img = np.expand_dims(img,axis=0)#改变图像大小
img = inception_v3.preprocess_input(img)#将图像格式转换为Inception V3模型能够处理的张量
return img
def deprocess_image(x): #通用函数,将一个张量转换为有效图像
if K.image_data_format() == ‘channels_first‘:
x = x.reshape((3,x.shape[2],x.shape[3]))
x = x.transpose((1,2,0))
else:
x = x.reshape((x.shape[1],x.shape[2],3)) #对inception_v3.preprocess_input所做的预处理进行反向操作
x /= 2.
x += 0.5
x *= 255.
x = np.clip(x,0,255).astype(‘uint8‘)
return x
#在多个连续尺度上运行梯度上升
import numpy as np
step = 0.01 #步长
num_octave = 3 #运行梯度上升的尺度个数
octave_scale = 1.4 #两个尺度之间的大小比例
iterations = 20 #在每个尺度上运行梯度上升的步数
max_loss = 10. #如果损失增大到大于10,我们要中断梯度上升的过程,以避免得到丑陋的伪影
base_image_path = ‘IU.jpeg‘ #将这个变量修改为你要使用的图像的路径
img = preprocess_image(base_image_path)#将基础图像加载成一个numpy数组
original_shape = img.shape[1:3]
successive_shapes = [original_shape]
for i in range(1,num_octave):
#准备一个由形状元组组成的列表,它定义了运行梯度上升的不同尺度
shape = tuple([int(dim/(octave_scale ** i)) for dim in original_shape])
successive_shapes.append(shape)
successive_shapes = successive_shapes[::-1] #将形状列表反转,变为升序
original_img = np.copy(img)
shrunk_original_img = resize_img(img,successive_shapes[0])#将图像numpy数组的大小缩放到最小尺寸
for shape in successive_shapes:
print(‘Processing image shape‘,shape)
img = resize_img(img,shape)#将梦境图像放大
img = gradient_ascent(img,
iterations = iterations,
step = step,
max_loss = max_loss)
upscaled_shrunk_original_img = resize_img(shrunk_original_img,shape)
same_size_original = resize_img(original_img,shape)
lost_detail = same_size_original - upscaled_shrunk_original_img
img += lost_detail
shrunk_original_img = resize_img(original_img,shape)
save_img(img,fname=‘dream_at_scale_‘+str(shape)+‘.png‘)
save_img(img,fname=‘final_dream.png‘)
训练损失:
| 原图 | 效果图 |
 |
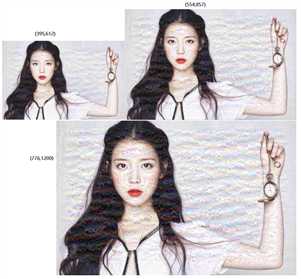 |
标签:pes isp 大量 http _for family red puts play
原文地址:https://www.cnblogs.com/nxf-rabbit75/p/10012317.html