标签:vector none span tran src 计算 http euler 目标
if (target == null)
{
//eulerAngles是欧拉角
Vector3 eulerAngles = transform.eulerAngles;
eulerAngles.z = 0;
transform.eulerAngles = eulerAngles;
}
else {
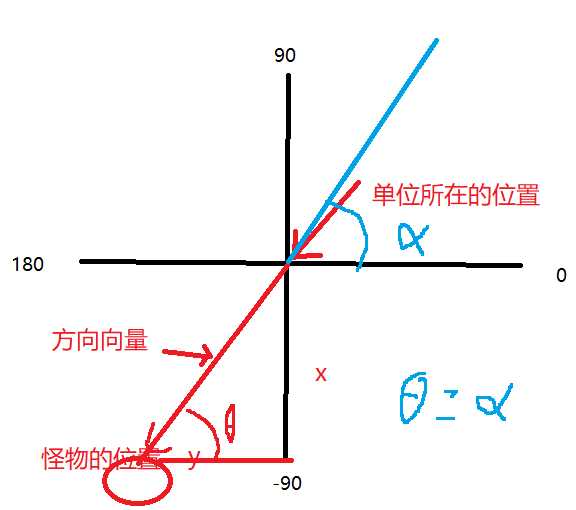
Vector3 vec = (target.Position - transform.position).normalized;//单位向量
float angle = Mathf.Atan2(vec.y,vec.x);//是通过yx的tan求出角度,适用于(-180,180)
//Mathf.Atan()适用于(-90,90)
Vector3 eulerAngles = transform.eulerAngles;
eulerAngles.z = angle * Mathf.Rad2Deg - 90;
transform.eulerAngles = eulerAngles;
}
要减去90,是因为这样是以x轴的正方向去对准目标,减去90度才是以水瓶的头去对准
最后,在欧拉角中,z轴的方向顺时针转动是-,逆时针转动是+.
<wiz_tmp_tag id="wiz-table-range-border" contenteditable="false" style="display: none;">
在2D中朝向角度的计算
标签:vector none span tran src 计算 http euler 目标
原文地址:https://www.cnblogs.com/soviby/p/10013287.html