标签:intel color 信号 实现 bee war 直线 技术分享 关系
机器人底盘作为控制机器人运动和定位导航的重要组成部分,在机器人身上充当着桥梁枢纽的作用。思岚科技基于SLAMWARE自主定位导航算法,融合多传感器数据,灵活的规划机器人行走路线。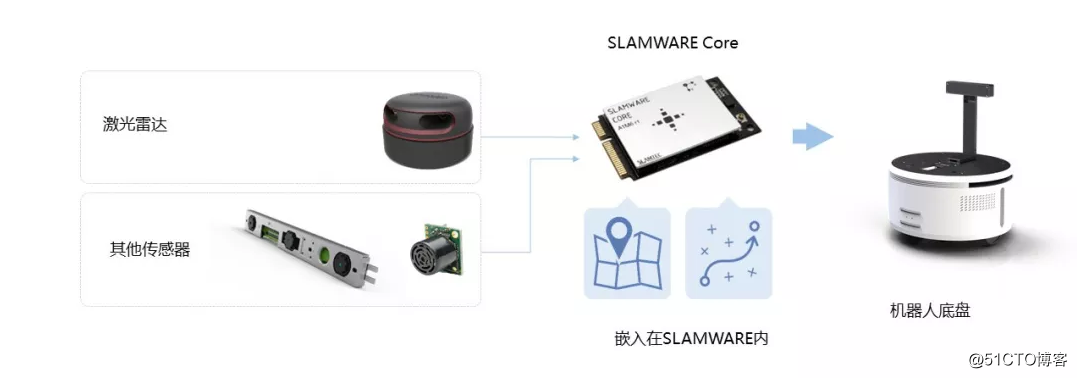
机器人底盘各传感器能否正确选型及安装,关系到定位导航工作能否正常进行。本次将为大家分享基于SLAMWARE解决方案的机器人底盘常用传感器选型及安装,主要包括激光雷达,超声波传感器,碰撞传感器,防跌落传感器以及深度摄像头等传感器。
激光雷达
利用激光雷达传感器,时刻扫描周围环境,提供地图数据,构建精度高达5cm的地图,并基于该地图数据实现自主路径规划及导航功能;
雷达安装是否水平对slamware解决方案的建图及定位有重要影响:
影响测距精度,进而影响建图精度和定位精度;
如若雷达扫描平面水平向下倾斜,激光点会扫描到地面,这种情况下建图则会导致障碍物错乱,定位则会导致定位漂移;
雷达安装指南:
雷达水平安装角度:0度 ~ +2度 (倾角朝上);
雷达扫描开口角度:建议270度及以上,最好在机器人正前方和正后方均有开口,至少需要大于220度;
雷达盲区:15 cm,建议雷达在安装时,可以略往底盘结构中心靠近,以减少盲区;
超声波传感器
在工作时,超声波传感器能精准探测到玻璃、镜面等高透材质障碍物,从而在靠近这些物体前能及时避让;
超声波的数据对导航时的行为干扰非常大,如果超声波的感应角度过大(建议不大于20度),或者噪点过多,均会造成导航时出现异常的绕圈,不走直线,或者路径取消等行为。
如果机器人行动异常,首先考虑是否为超声波误触发,可以查看超声波的触发状态:
1.使用Robo Studio,查看机器人Sonar触发状态。
2.浏览器登录192.168.11.1,打开diagnose功能,查看Sonar触发状态。
碰撞传感器
碰撞传感器可帮助底盘感受到障碍物,判断周围存在障碍物的方位,并协调其他传感器,做出正确的规避行为。
碰撞传感器一般装在机器人的前进方向,如果前向碰撞传感器触发了,默认的策略是倒退。如果使用了正向充电的红外方案,建议安装前向碰撞传感器。如果使用了反向充电的红外方案,建议在机器人后方加装碰撞传感器。
防跌落传感器
防跌落传感器可帮助底盘360°侦查周围的工作环境,判断工作区域是否存在边界、台阶、坡度等情况,从而发送信号请求底盘改变前进方便,避免跌落;
防跌落传感器要尽量减少误触发,可以采用sharp或其他精度较高的红外传感器来实现,如果防跌落传感器触发了,会被永久的纪录在地图上,机器人导航时会对此进行避障。如果使用红外传感器来实现防触脚等功能,建议将此红外传感器配置成碰撞传感器来处理。
深度摄像头
利用深度摄像头传感器可侦测到位于雷达扫描平面上方的障碍物,并及时发送信号进行障碍物规避;
选择深度摄像头的时候要尽量选择盲区小的,精度高的,例如Intel RealSense R200。
如果在基于SLAMWARE解决方案选择相关传感器及安装过程中遇到任何问题的话,可在后台留言或发送问题至support@slamtec.com。
标签:intel color 信号 实现 bee war 直线 技术分享 关系
原文地址:http://blog.51cto.com/13974836/2323052