标签:incr 边缘检测 https opencv 滤波 real etc tla 视觉
滤波和边缘检测
1. 空间滤波和频域滤波
线性滤波和非线性滤波
滑动滤波:
blur 和 boxfilter、高斯滤波器是真正的低通滤波器、与boxfilter相比没有振铃现象。
Practice matter:
Matlab 线性滤波器:H=fspecila(‘Gaussian’,7,1);
Opencv:filter2()
非线性滤波器:中值滤波器
Image filtering: compute function of local neighborhood at each position
? Really important!
? Enhance images
? Denoise, resize, increase contrast, etc.
? Extract information from images
? Texture, edges, distinctive points, etc.
? Detect patterns
? Template matching (eg. DIC/DSCM)
https://docs.opencv.org/2.4/doc/tutorials/imgproc/histograms/template_matching/template_matching.html
2. 边缘滤波
Canny Sobel Laplance
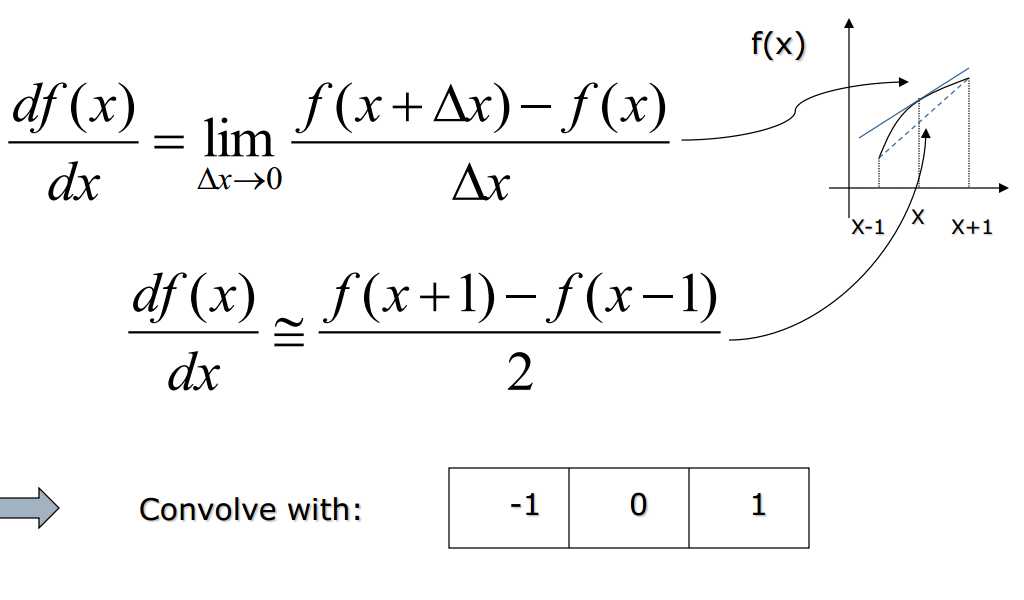
一维图像:对图像进行求导。求导是方法:点位置进行后一位置减前一位置进行差分除以2
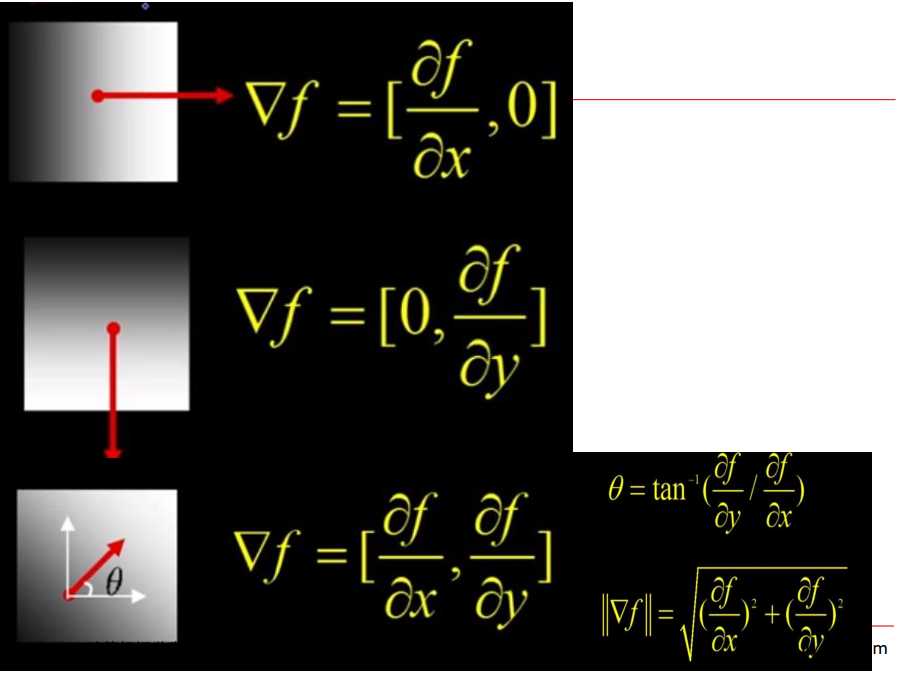
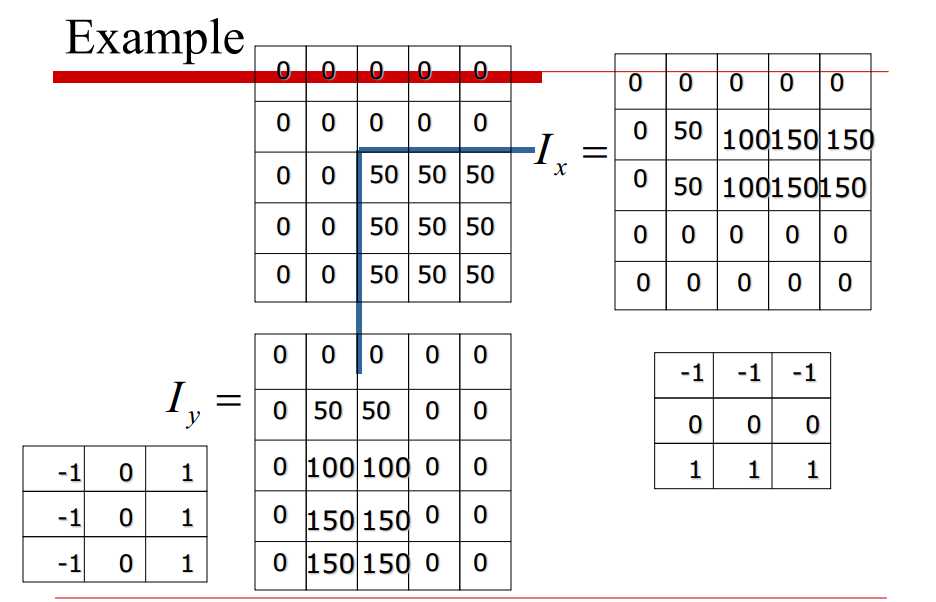
二维图像:
图像求取梯度之前,对噪声较为敏感,需要事先对图像进行平滑去噪处理。
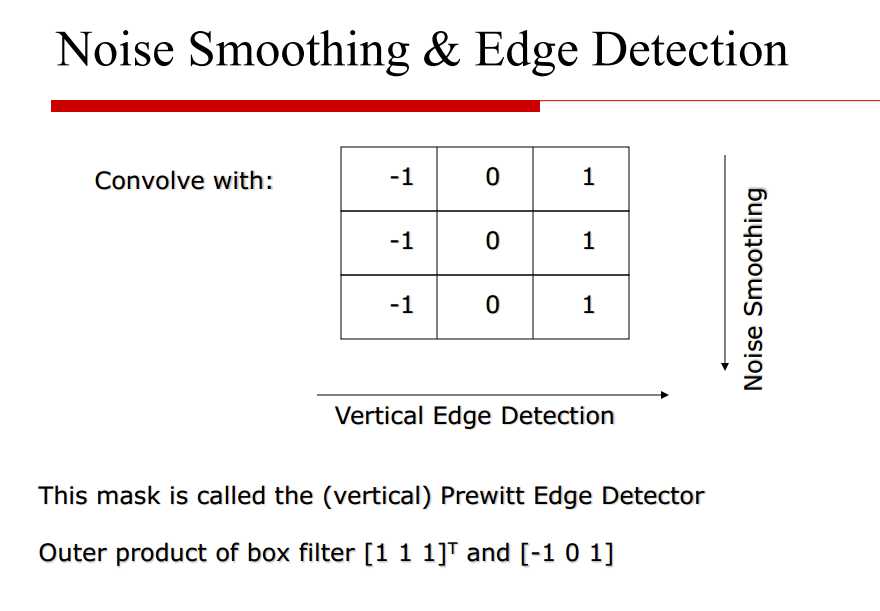
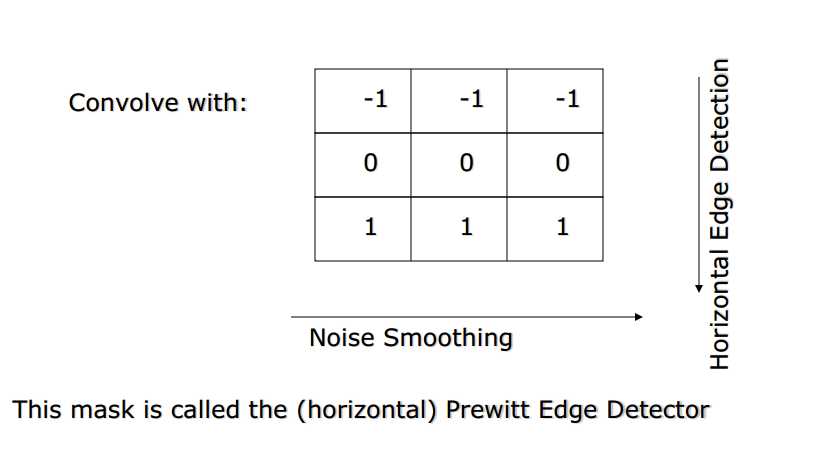
Prewitt 边缘检测算子:
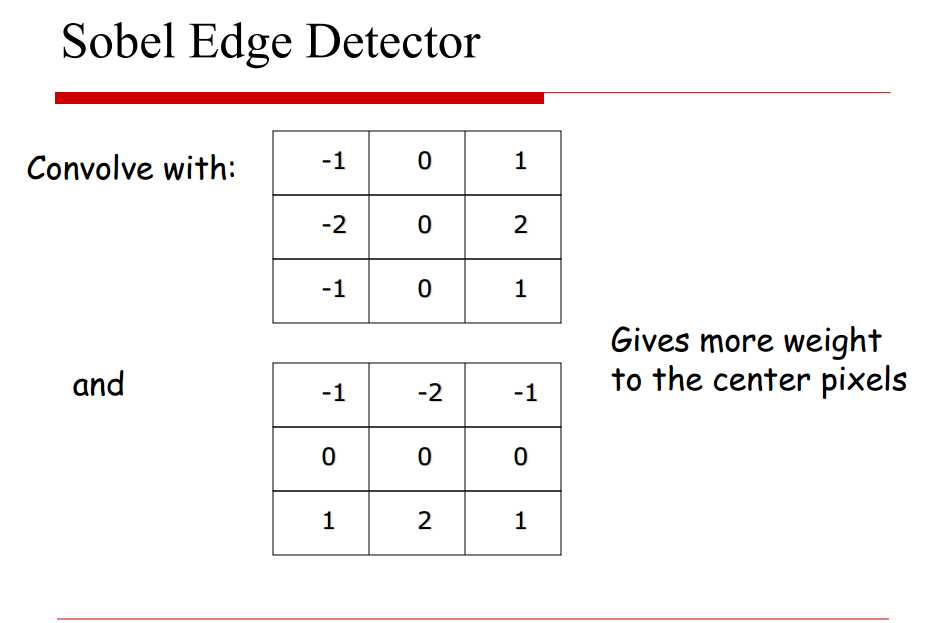
Sobel 边缘检测:
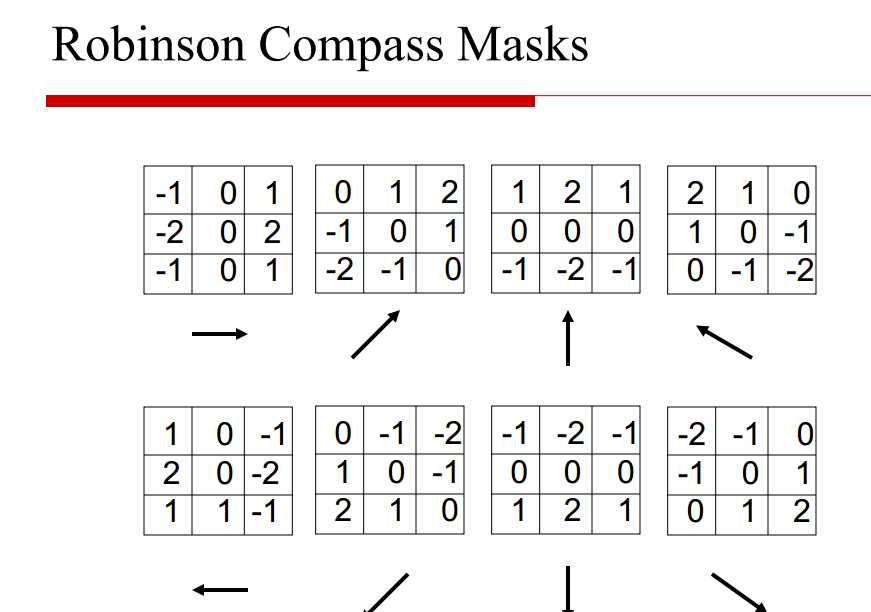
鲁滨逊卷积Mask
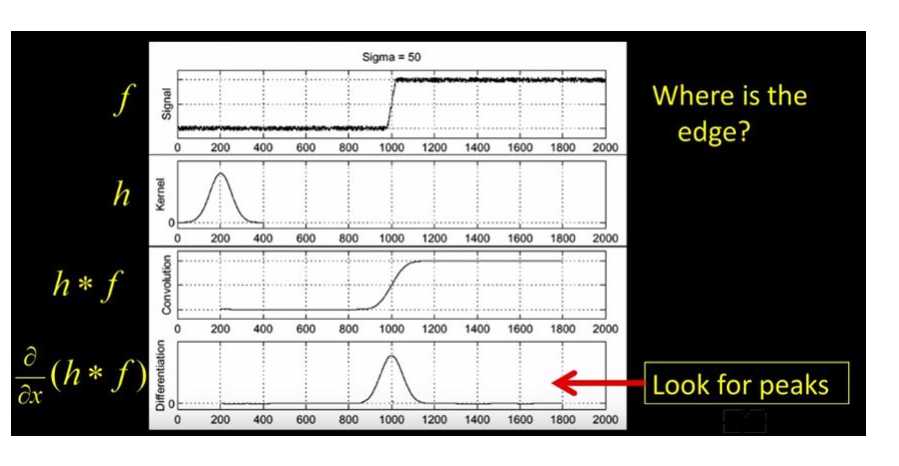
一阶导数为极值的地方在二阶导数为0的地方相等。
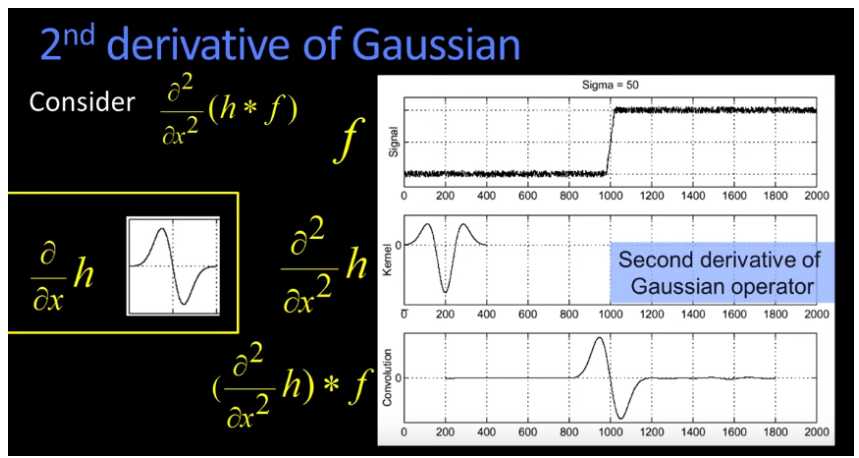
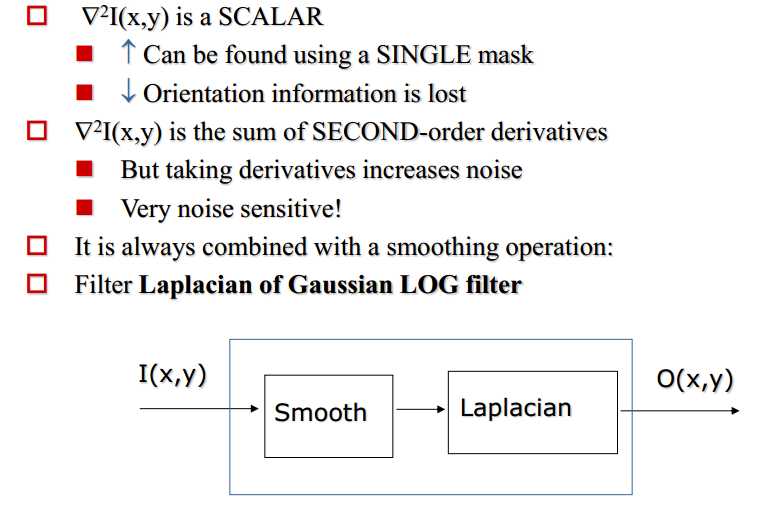
拉普拉斯变换算子:
对于噪声较为敏感,所以先用高斯滤波器进行平滑再求二阶导。
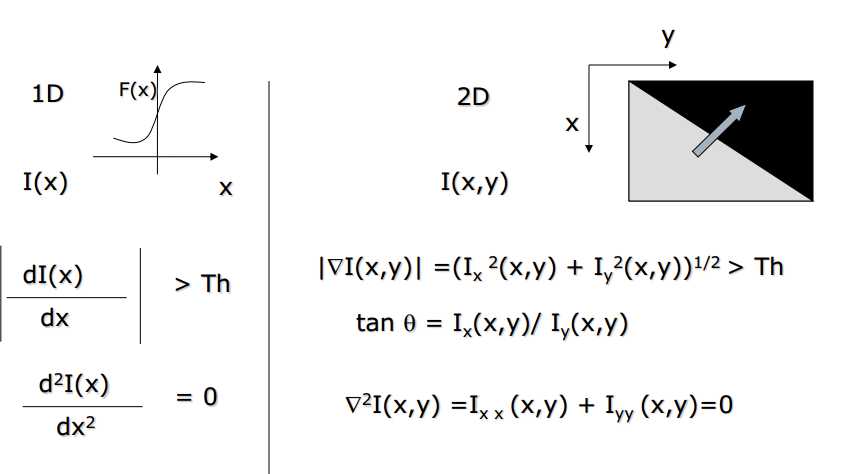
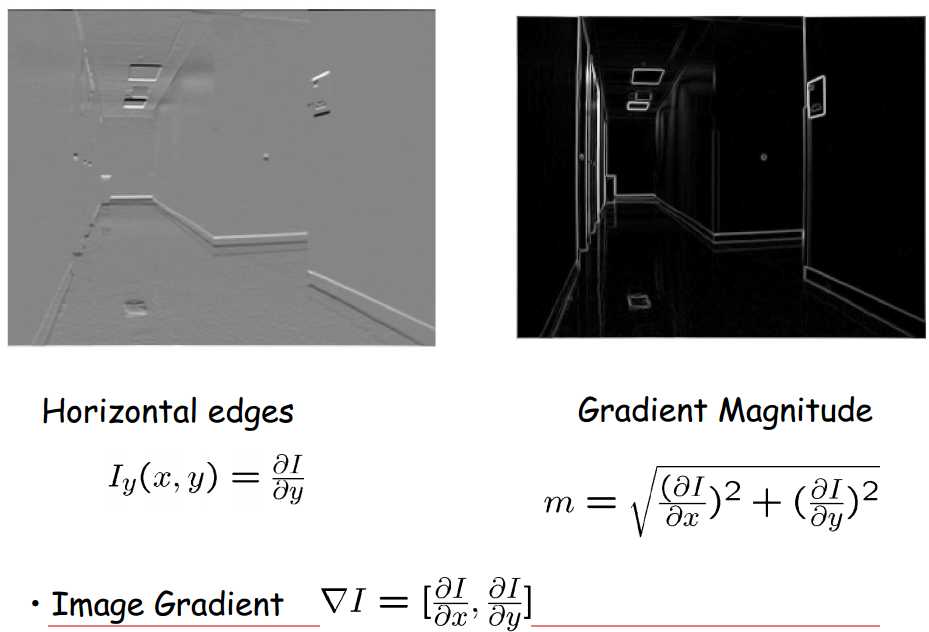
求梯度的幅值:
水平和垂直导数的平方和求导
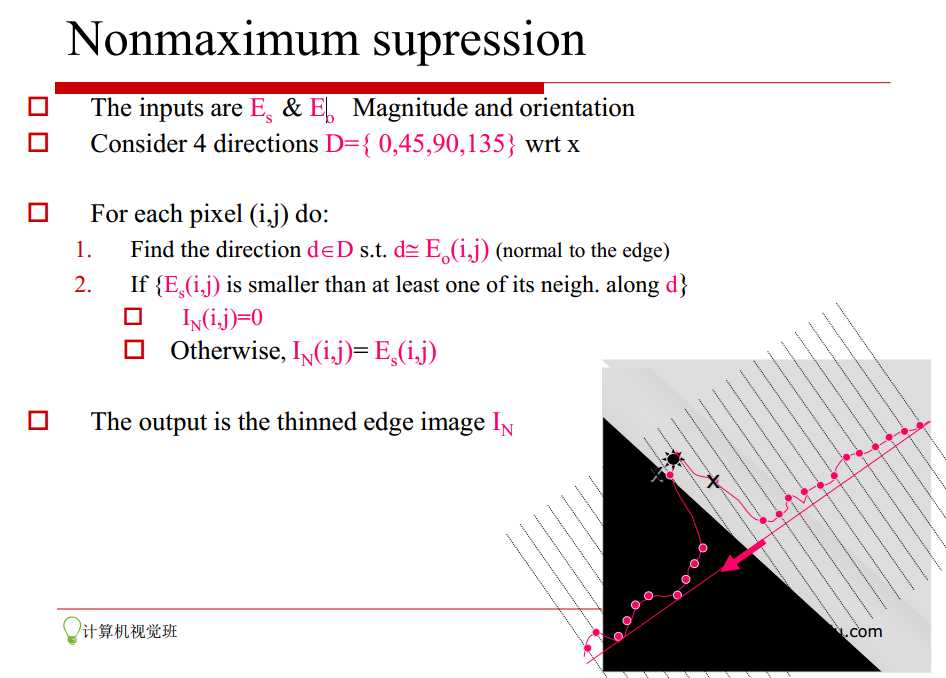
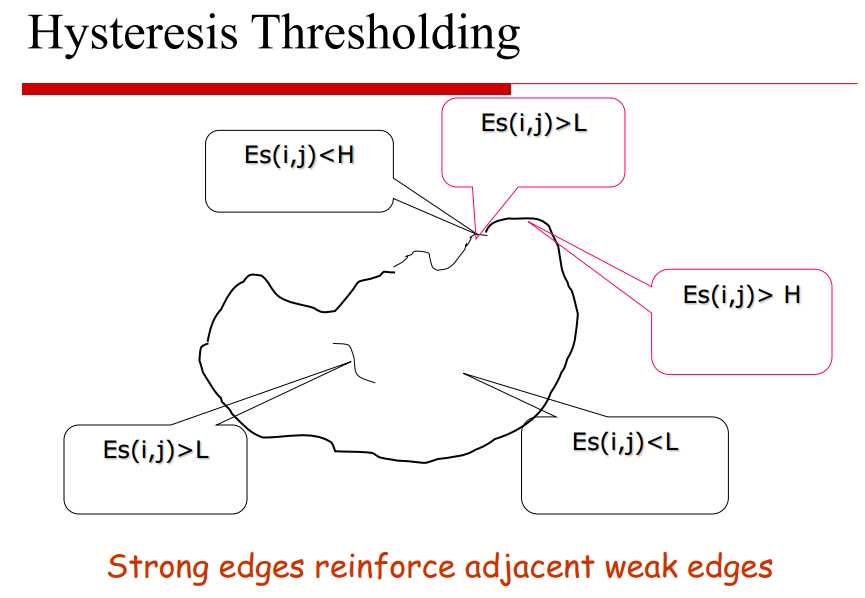
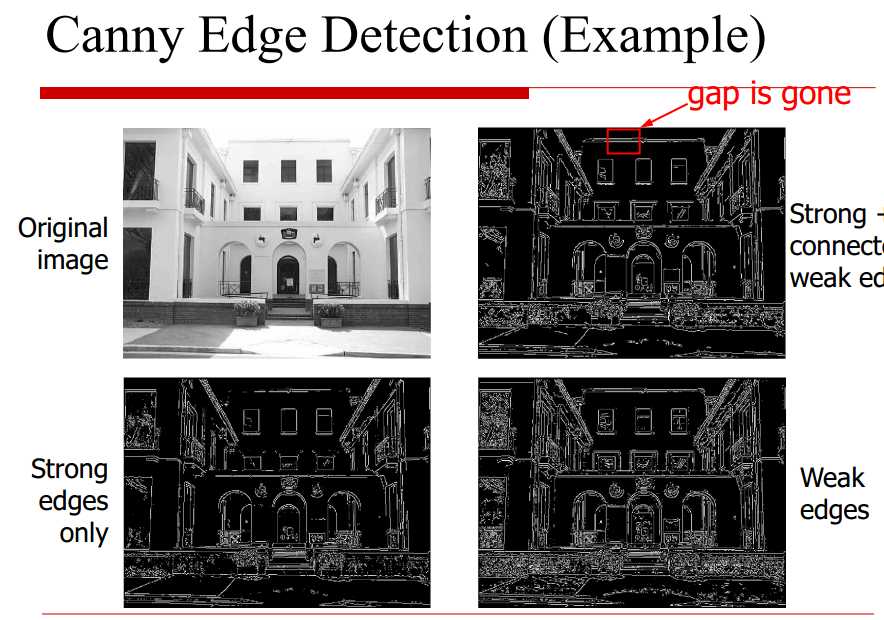
Canny算子:
3.项目:车牌检测 SVM和神经网络
1. 图像分割
2.特征提取
3.模式识别
SVM或者神经网络
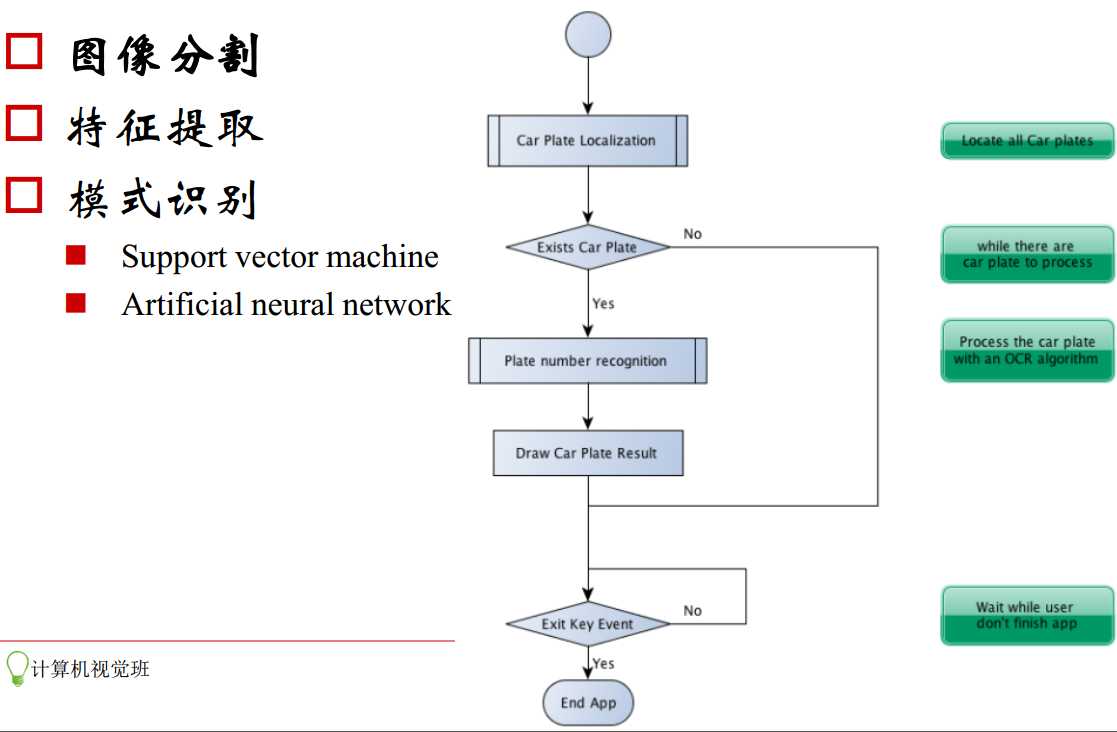
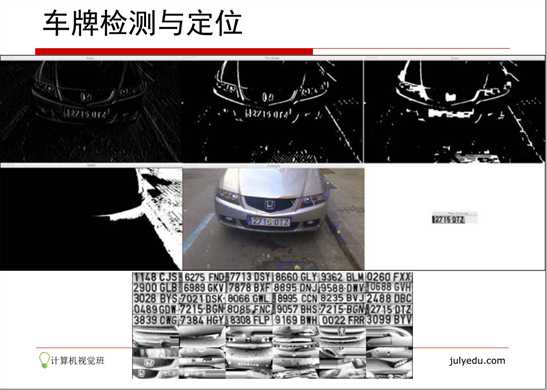
车牌的检测与定位:
1. 从图片的RGB或IR图像检测成灰度
2. 进行高斯滤波进行滤波、
3. 边缘检测 sobel 竖直检测
4.形态化,将连续区域进行白色进行连通
5.去除背景
6. 在原图像进行可能出现的区域矩形框框起来
7.根据长宽比去除大量的矩形框
8.根据SVM进行图像矩形框进行分类。得到唯一一个车牌的位置
9. 识别字符用ANN(人工神经网络)。
标签:incr 边缘检测 https opencv 滤波 real etc tla 视觉
原文地址:https://www.cnblogs.com/lvxiaoning/p/10070584.html