标签:函数的参数 create width htm one vmax 了解 style iter
轮廓到底是什么?一个轮廓一般对应一系列的点,也就是图像中的一条曲线.表示的方法可能根据不同情况而有所不同.有多重方法可以表示曲线.在openCV中一般用序列来存储轮廓信息.序列中的每一个元素是曲线中一个点的位置.关于序列表示的轮廓细节将在后面讨论,现在只要简单把轮廓想象为使用CvSeq表示的一系列的点就可以了.
函数cvFindContours()从二值图像中寻找轮廓.cvFindContours()处理的图像可以是从cvCanny()函数得到的有边缘像素的图像,或者是从cvThreshold()及cvAdaptiveThreshold()得到的图像,这时的边缘是正和负区域之间的边界.
图8-2描述了cvFindContours的函数功能,图像的上半部分是神色背景和白色区域(被从A到E标记)的测试图像.下半部分是使用cvFindCountours()函数后会得到的轮廓的说明.这些轮廓被标记为cX或hx,"c"表示"轮廓(contour)","h"表示"孔(hole)","X表述数字".其中一些轮廓用虚划线表示;表明他们是白色区域的外部边界(例如,非0区域).孔(hole)的外部边界(例如,非0区域)即白色区域的内部边界.在图中是用电线表示外部边界的.OpenCV的cvFindContours()函数可区分内部和外部边界.
包含的概念在很多应用中都非常重要.因此.OpenCV允许得到的轮廓被聚合成一个轮廓树,从而把包含关系编码到树结构中.这个测试图的轮廓树在根节点的轮廓叫c0,孔h00和h01是它的字子节点.这些轮廓中直接包含轮廓称为他们的子节点,以此类推.
现在来看cvFindContours()函数
int cvFindContours( CvArr* image, CvMemStorage* storage, CvSeq** first_contour,
int header_size CV_DEFAULT(sizeof(CvContour)),
int mode CV_DEFAULT(CV_RETR_LIST),
int method CV_DEFAULT(CV_CHAIN_APPROX_SIMPLE),
CvPoint offset CV_DEFAULT(cvPoint(0,0)));
storage 是内存存储器,cvFindContours()找到的轮廓记录在此内存里.正如之前所说,这个存储器的空间应该由cvCreateMemStorage()分配.
first_contour 是指向CvSeq*的一个指针firstContour.无需动手,cvFindContours()会自动分配该指针.实际上,只要在这里传一个指针就可以了函数会自动设置.不需要分配和释放(new/delete或者malloc/free).就是这个指针(例如,*firstContour)指向轮廓树的首地址(head).cvFindContours()返回值是,找到的所有轮廓的个数
cvSeq* firstContout = NULL;
cvFindContours(..., &firstContour, ...);
headerSize告诉cvFindContours()更多有关对象分配的信息,它可以被设定为sizeof(CvContour)或者sizeof(CvChain)(当近似方法参数method被设定为CV_ChAIN_CODE时使用后者).最后是mode和method参数,他们分别指定计算方法和如何计算.
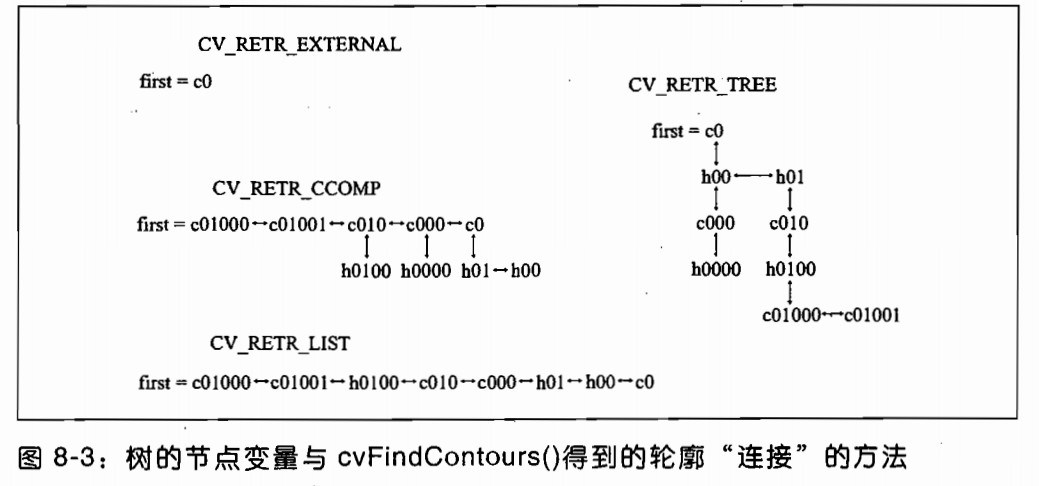
mode变量可以被设置为以下四个选项之一: CV_RETR_ExTERNAL, CV_RETR_LIST, CV_RETR_CCOMP或CV_RETR_TREE.mode的值向cvFindeContours()说明需要的轮廓类型,和希望的放回值形式.具体说来,mode的值决定把找到的轮廓如何挂到轮廓树节点变量(h_prev,h_next,v_prev和v_next)上,图8-3展示了四种可能的mode值所得到的结果的拓扑结构.
每中情况下,结构都可以看成是被"横向"连接(h_next和h_prev)联系和被"纵向"连接(v_next和v_prev)不同的"层次".
CV_RETR_EXTERNAL 只检测出最外的轮廓.图8-2中,只有一个最外轮廓,因此图8-3中第一个轮廓指向最外的序列,除此之外没有别的连接
CV_RETR_LIST 检测所有的轮廓并将他们保存到表(list)中.图8-3描绘了从图8-2样图中得到的表.在这个例子中,有8条轮廓被找到,他们相互之间有h_prev和h_next连接(这里并没有使用v_prev和v_next)
CV_RETR_CCOMP 检出所有的轮廓并将他们组织成双层结构(two-level hierarchy),顶层边界是所有成份的外界边界,第二层边界是空的边界.图8-3中,我们能看到5个外部边界,其中3个包含孔.孔被v_next和v_prev可以只包括一个值,此节点可以只有一个子节点.c0中有两个孔,因为v_next可以值包括一个值,次节点可以只有一个子节点.c0之内的所有孔相互间有h_prev和h_next指针连接.
CV_RETR_TREE 检出所有轮廓并且重新建立网状的轮廓结构.在我们给出的例子中(图8-2和8-3中),这意味着根节点是最外的轮廓c0.c0之下是空h00,在同一层次中与另一个孔h01相连接.同理,每个孔都有子节点(相对应的是c000和c010),这些子节点与父节点被垂直连接起来.这个步骤一直持续到图像最内层的轮廓,这些轮廓会成为树叶节点.
以下的五个值与方法相关(例如轮廓会如何被近似).
CV_CHAIN_CODE 用freeman链码输出轮廓,其他方法输出多边形(顶点的序列)
CV_CHAIN_APPROX_NONE 将链码编码中的所有点转换为点
CV_CHAIN_APPROX_SIMPLE 压缩水平,垂直或斜的部分,只保存最后一个点
CV_CHAIN_APPROX_TC89_L1或CV_CHAIN_APPROX_TC89_KCOS使用Ten-Chin链逼近算法中的一个
CV_LINK_RUNS 与上述算法完全不同的算法,连接所有水平层次的轮廓.此方法只可与Cv_RETR_LIST搭配使用.
使用序列表示轮廓
当调用cvFindContours函数的时候,返回多个序列.序列的类型依赖与调用cvFindContours时 所传递的参数.默认情况下使用CV_RETR_LIST和CV_CHAIN_APPROX_SIMPLE参数.
序列中保存一系列的点,这些点构成轮廓,轮廓是本章的重点.轮廓只是序列所能表示物体的一种.轮廓的点的序列,可以用来表示图像空间中的曲线.这种点的序列很常用,所有需要有专门的函数来帮助我们对他进行处理.下面是一组这样的处理函数.
int cvFindContours( CvArr* image, CvMemStorage* storage, CvSeq** first_contour,
int header_size CV_DEFAULT(sizeof(CvContour)),
int mode CV_DEFAULT(CV_RETR_LIST),
int method CV_DEFAULT(CV_CHAIN_APPROX_SIMPLE),
CvPoint offset CV_DEFAULT(cvPoint(0,0))); CvContourScanner cvStartFindContours( CvArr* image, CvMemStorage* storage,
int header_size CV_DEFAULT(sizeof(CvContour)),
int mode CV_DEFAULT(CV_RETR_LIST),
int method CV_DEFAULT(CV_CHAIN_APPROX_SIMPLE),
CvPoint offset CV_DEFAULT(cvPoint(0,0))); CvSeq* cvFindNextContour( CvContourScanner scanner ); void cvSubstituteContour( CvContourScanner scanner, CvSeq* new_contour ); /* Releases contour scanner and returns pointer to the first outer contour */
CvSeq* cvEndFindContours( CvContourScanner* scanner ); /* Approximates a single Freeman chain or a tree of chains to polygonal curves */
CvSeq* cvApproxChains( CvSeq* src_seq, CvMemStorage* storage,
int method CV_DEFAULT(CV_CHAIN_APPROX_SIMPLE),
double parameter CV_DEFAULT(0),
int minimal_perimeter CV_DEFAULT(0),
int recursive CV_DEFAULT(0));
cvSubstituteContour()函数用于替换scanner指向的轮廓.该函数的一个特性是,如果参数 new_contour为NULL,那么当前的轮廓将被从Scanner指定的树或链表中删除(受影响的序列会作适当更新,来保证不会有指针指向不存在的物体).
函数cvEndFindContour()结束轮廓查找,并且将scanner设置为结束状态.注意,scanner并没有被删除,实际上该函数返回的是指针所指序列的第一个元素.
最后一个函数cvApproxChains()函数.该函数将Freeman链转换为多边形表示(精确转换或者近似拟合).
一般情况下,通过cvFindCountours获取的轮廓是一系列顶点的序列.另一种不同的表达是设置method参数为CV_CHAIN_CODE,然后生成轮廓.当选者CV_CHAIN_CODE标志的时候,检测的轮廓通过Freemain链码[Freeman67](图8-4)的方式返回.在Freeman链码中,多边形被表示为一系列的位移,每一个位移有8个方向,这8个方向使用整数0到7表示.Freeman链码对于识别一些形状的物体很有帮助.如果得到的是Freeman链码,可以通过以下两个函数读出每个点
void cvStartReadChainPoints( CvChain* chain, CvChainPtReader* reader ); CvPoint cvReadChainPoint( CvChainPtReader* reader ); 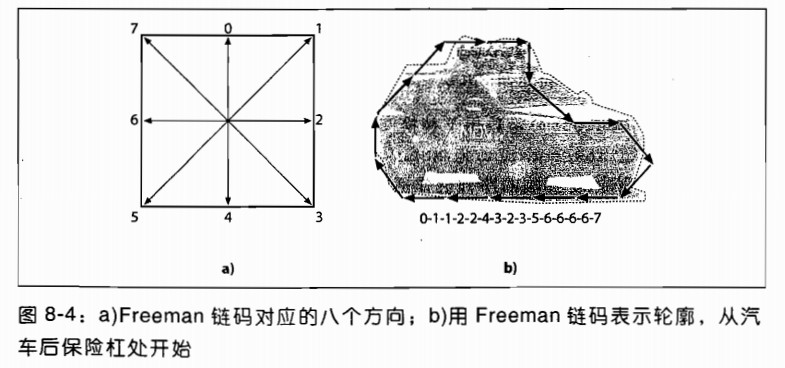
第一个函数用来初始化Freeman链CvChainPtReader结构,第二个函数通过CvChainptReader来读每个点,CvChainPtReader对应当前状态.结构CvChain从CvSeq扩展得来.和CvContourScanner从多个轮廓间迭代一样,CvChainPtReader用于迭代一个使用Freemain链码表示轮廓中的每个点.CvChainPtReader和CvSeqReader的用法类似.如您所期望,当所有点都读完后,返回CvChainPtReader值为NULL.
一个经常使用的功能是在屏幕上绘制检测到的轮廓.绘制可以用cvDrawContours函数完成
/* Draws contour outlines or filled interiors on the image */
void cvDrawContours( CvArr *img, CvSeq* contour,
CvScalar external_color, CvScalar hole_color,
int max_level, int thickness CV_DEFAULT(1),
int line_type CV_DEFAULT(8),
CvPoint offset CV_DEFAULT(cvPoint(0,0)));
通过max_level变量可以告诉cvDrawConturs() 如何处理通过节点树变量连结到一个轮廓上的其他任何轮廓.此变量可以被设置为遍历轮廓的最大深度.因此max_level = 0表示与输入轮廓属于同意等级的所有轮廓(更具体的说,输入轮廓和与其相邻的轮廓被画出),max_level = 1表示与输入轮廓属于同一登记的所有轮廓与其子节点被画出,以此类推.如果项要画的轮廓是由cvFindContous()的CV_RETR_CCOMP或CV_RETR_TREE模式得到的话,max_level的负值也是被支持的.在这种情况下,max_level=-1表示只有输入轮廓被画出,以此类推,max_level = -2 表示输入轮廓与其直系(仅直接相连的)子节点会被画出,以此类推.
参数thickness和line_type就如其字面含义所示.最后,我们可以给绘图程序一个偏移量,这样轮廓可以被画在指定的精确坐标上.当轮廓坐标被转换成质心坐标或其他局部坐标系的时候,这个特性非常有用.
如果在图像上的不同感兴趣的区域多次执行cvFindContour(),然后又想将所有结果在原来大图像上显示出来,便宜量offset也很有用.相反,可以先从大图提取出一个轮廓,然后在用offset和填充,在小图像上形成和轮廓对应的蒙板(mask);
首先创建一个窗口用于显示图像,滑动条(trackbar)用于设置阈值,然后对采二值化后的图像提取轮廓并绘制轮廓.当控制参数的滑动条变换时,图像被更新.
#include "stdafx.h"
#include <cv.h>
#include <highgui.h>
IplImage* g_image = NULL;
IplImage* g_gray = NULL;
int g_thresh = 100;
CvMemStorage* g_storage = nullptr;
void on_trackbar(int)
{
if (g_storage == nullptr)
{
g_gray = cvCreateImage(cvGetSize(g_image),8,1);
g_storage = cvCreateMemStorage(0);
}
else
{
cvClearMemStorage(g_storage);
}
CvSeq* contours = NULL;
cvCvtColor(g_image,g_gray,CV_BGR2GRAY);
cvThreshold(g_gray,g_gray,g_thresh,255,CV_THRESH_BINARY);
cvFindContours(g_gray,g_storage,&contours);
cvZero(g_gray);
if (contours)
{
cvDrawContours(g_gray,contours,cvScalarAll(255),cvScalarAll(255),100);
}
cvShowImage("Contours",g_gray);
}
int _tmain(int argc, _TCHAR* argv[])
{
g_image = cvLoadImage("C:\\Users\\chenchao\\Desktop\\细胞图象\\正常的红细胞\\5.bmp");
cvNamedWindow("Contours",1);
cvCreateTrackbar("Threshold","Contours",&g_thresh,300,on_trackbar);
on_trackbar(0);
cvWaitKey(0);
printf("HELLO");
return 0;
}
然后g_image被转换为灰度图像,接着用g_thresh为参数进行二值化处理,得到的二值图像保存在g_gray中.cvFindContours从二值图像g_gray查找轮廓,然后将得到的轮廓用cvDrawContours()函数绘制为白色到灰度图像.最终图像在窗口中显示出来,并将在回调函数开始处申请的结构释放.
在上例中,我们检测出输入图像的轮廓,然后逐个绘制没格轮廓.从这个例子中,我们可以了解到轮廓检测方法(如代码中是CV_RETR_LIST)以及max_depth(代码中是0)等参数的细节.如果设置的max_depth是一个比较大的值,你可以发现cvFindCountours()返回的轮廓是通过h_next连接被遍历.对于其他一些拓扑结构(CV_RETR_TREE,CV_REER_CCOMP等),你会发现有些轮廓被画过不只一次
例8-3 在输入图像上寻找并绘制轮廓
int _tmain(int argc, _TCHAR* argv[])
{
cvNamedWindow("src");
IplImage* img_8uc1 = cvLoadImage("C:\\Users\\chenchao\\Desktop\\细胞图象\\正常的红细胞\\5.bmp",0);
IplImage* img_edge = cvCreateImage(cvGetSize(img_8uc1),8,1);
IplImage* img_8uc3 = cvCreateImage(cvGetSize(img_8uc1),8,3);
cvThreshold(img_8uc1,img_edge,128,255,CV_THRESH_BINARY);
CvMemStorage* storage = cvCreateMemStorage(0);
CvSeq* first_contour = nullptr;
int Nc = cvFindContours(img_edge,storage,&first_contour,sizeof(CvContour),CV_RETR_LIST);
int n = 0;
printf("Total Contours Detected : %d \n",Nc);
for (CvSeq* c = first_contour; c!= NULL; c= c->h_next)
{
cvCvtColor(img_edge,img_8uc3,CV_GRAY2BGR);
cvDrawContours(img_8uc3,c,cvScalar(0,255,0),cvScalar(0,0,255),0,2,8);
printf("contours #%d\n",n);
cvShowImage("src",img_8uc3);
printf(" %d elements: \n",c->total);
for (int i=0 ; i<c->total; ++i)
{
CvPoint* p = CV_GET_SEQ_ELEM(CvPoint,c,i);
printf(" (%d,%d) \n",p->x,p->y);
}
cvWaitKey(0);
n++;
}
printf("Finished all contours.\n");
cvCvtColor(img_8uc1,img_8uc3,CV_GRAY2BGR);
cvShowImage("src",img_8uc3);
cvWaitKey(0);
cvDestroyWindow("src");
cvReleaseImage(&img_8uc1);
cvReleaseImage(&img_8uc3);
cvReleaseImage(&img_edge);
return 0;
}
当我们绘制一个多边形或者进行形状分析的时候,通常需要使用多边形毕竟一个轮廓,使顶点数目变少.有多种方法可以实现这个功能,OpenCV实现了其中的一种逼近算法.函数cvApproxPoly是该算法的一种实现,可以处理轮廓的序列.
(CvSeq*) cvApproxPoly( const void* src_seq,
int header_size, CvMemStorage* storage,
int method, double eps,
int recursive CV_DEFAULT(0));
因为cvApproxPoly在返回结果的时候需要创建新的对象,因此 需要指定一个内存存储器以及头结构大小.(一般为sizeof(CvContour)).
逼急算法目前只可使用CV_POLY_APPROx_DP.另外两个参数为逼近算法参数(目前只用到第一个).eps参数指定逼近的精度.如果想了解这个参数如何起作用的的必须仔细了解具体的算法.最后一个参数指定是否针对全部的轮廓(通过h_next和v_next可达的)进行逼近
如果为0,则表示只处理src_seq指向轮廓.
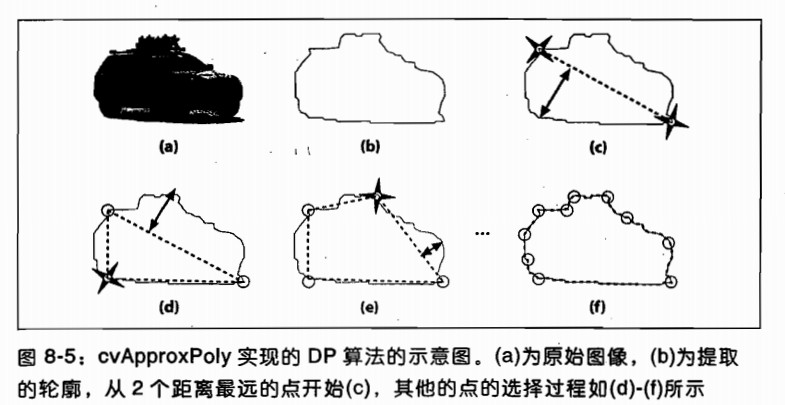
下面简要介绍一下算法的工作原理.参考图8-5,算法先从轮廓(图b)选择2个最远的点,然后将2个连成一个线段(图c),然后再查找轮廓上到线段距离最远的点,添加到逼近后的心轮廓(图d).算法反复迭代,不断将最远点的添加到结果中.直到所有点的点到多边形的最短距离小于eps参数指定的精度(图f).从这里可以看出,精度和轮廓的周长,或者外包矩形周长的几分之一比较合适.
曲线逼近的过程和寻找关掉点的过程密切相关。跟曲线上的其他点相比,关键点是那些包含曲线信息比较多的点。关键点在逼近算法以及其他应用中都会涉及。函数cvFindDominantPoints()实现了被称为IPAN*[Chetvreikov99]的算法.
CvSeq cvFindDominantPoints(CvSeq* contour,CvMemStorage* storage,int metod = CV_DOMINANT_IPAN,double parameter1 = 0,double parameter2 = 0,double parameter3 = 0,double parameter4 = 0);函数cvFindDominantPoints()按照惯例使用参数CvSeq* 和CvMemStorage* .并且要求指定一个方法,和cvApproxPoly()相同,目前可供选择的方法只有一个,就是CV_DOMINANT_IPAN.
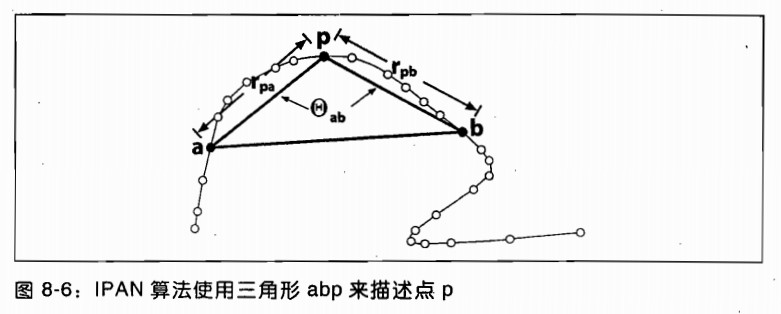
接下来四个参数是:最短距离dmin,最长距离dmax,相邻距离dn和最大角度θmax.如图8-6所示,算法首先把所有两边距离rpa和rpb在dmin和dmax之间,θab < θmax的三角形找出来.然后保留对于距离dn(dn的大小不得超过dmax)有最小夹角θab的所有点p.dmin,dmax,dn和θmax典型值可以是7,9,9,150(最后一个参数是以度数为单位的角大小).
轮廓处理中经常遇到的另一个任务是计算一些轮廓变化的概括特性.这可能包括长度或者其他一些反映轮廓整体大小的度量.另一个有用的特性是轮廓的轮廓矩(contourmoment),可以用来概括轮廓的总形状特性
函数cvContourPerimeter()作用于一个轮廓并返回其长度.事实上,此函数是一个调用函数cvArcLength()的宏.
CVAPI(double) cvArcLength( const void* curve,
CvSlice slice CV_DEFAULT(CV_WHOLE_SEQ),
int is_closed CV_DEFAULT(-1));
CV_INLINE double cvContourPerimeter( const void* contour )
{
return cvArcLength( contour, CV_WHOLE_SEQ, 1 );
}
一个和cvArcLength()有紧密关系的函数是cvContourArea(),如其名称所示,这个函数同于计算轮廓的面积.函数的参数contour和slice和cvArcLength()一样.
CVAPI(double) cvContourArea( const CvArr* contour,
CvSlice slice CV_DEFAULT(CV_WHOLE_SEQ),
int oriented CV_DEFAULT(0));
当然长度和面积只是轮廓的简单特性,更复杂一些的特性描述应该是矩形边界框,圆形边界框或椭圆形边界框.有两种方法可以得到矩形边界框,圆形与椭圆形编辑框各只有一种方法.
CVAPI(CvRect) cvBoundingRect( CvArr* points, int update CV_DEFAULT(0) ); CVAPI(CvBox2D) cvMinAreaRect2(const CvArr* points,CvMemStorage* storage CV_DEFAULT(NULL));
cvBoundingRect()得到的长方形的一个问题是,cvRect只能表现一个四边水平和竖直的长方形.然而函数cvMinAreaRect2()可以返回一个包围轮廓最小的长方形,这个长方形可能是倾斜的;请看图8-7,该函数的参数和cvBoundingRect()的相似.opencv的数据类型CvBox2D就是用来表述这样的长方形状的.
typedef struct CvBox2D
{
CvPoint2D32f center; /* Center of the box. */
CvSize2D32f size; /* Box width and length. */
float angle; /* Angle between the horizontal axis */
/* and the first side (i.e. length) in degrees */
}
CvBox2D; 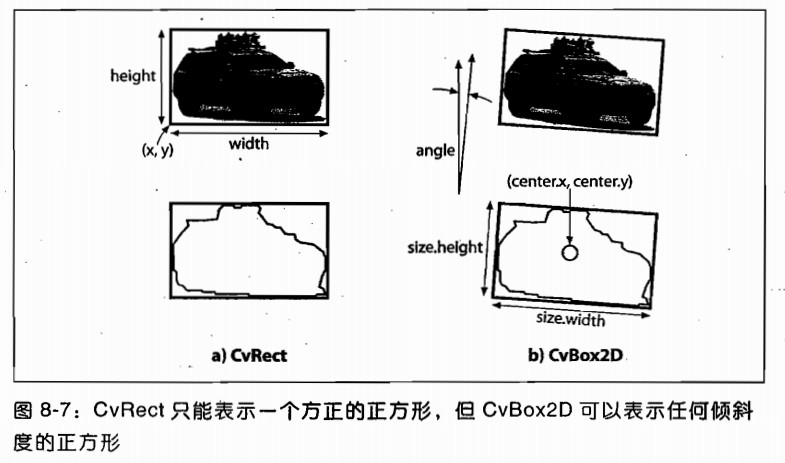
接着我们来看函数cvMinEnclosingCircle().该函数和矩形边界框的作用基本相同,输入同样很灵活,可以是点的序列,也可以是二维点的数组.
CVAPI(int) cvMinEnclosingCircle(const CvArr* points,CvPoint2D32f* center, float* radius);
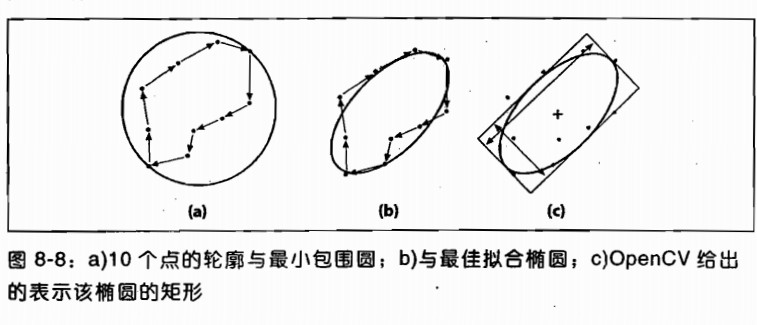
与最小包围圆一样,OpenCV提供一函数来拟合一组点,以获取最佳拟合椭圆
CVAPI(CvBox2D) cvFitEllipse2( const CvArr* points );
椭圆的拟合结果由CvBox2D结构体返回,给出的矩形正好完全包围椭圆,如图8-8所示.
在处理CvBox2D或多边形边界的时候,经常需要进行多边形以及边界框的重叠判断.OpenCV提供了一组方便的小函数用于此类测试.
CVAPI(CvRect) cvMaxRect( const CvRect* rect1, const CvRect* rect2 );
CVAPI(void) cvBoxPoints( CvBox2D box, CvPoint2D32f pt[4] );
/* Initializes sequence header for a matrix (column or row vector) of points -
a wrapper for cvMakeSeqHeaderForArray (it does not initialize bounding rectangle!!!) */
CVAPI(CvSeq*) cvPointSeqFromMat( int seq_kind, const CvArr* mat,
CvContour* contour_header,
CvSeqBlock* block );
/* Checks whether the point is inside polygon, outside, on an edge (at a vertex).
Returns positive, negative or zero value, correspondingly.
Optionally, measures a signed distance between
the point and the nearest polygon edge (measure_dist=1) */
CVAPI(double) cvPointPolygonTest( const CvArr* contour,
CvPoint2D32f pt, int measure_dist );
下一个使用函数cvBoxPoints()用于计算CvBox2D结构表示矩形的4个顶点.当然你也可以自己通过三角函数计算,不过这令人头大,而简单调用一下这个函数则可求出.
第三实用函数cvPointSeqFromMat()从mat中初始化序列.这在你需要使用轮廓相关的函数,但是函数又不支持矩阵参数的时候使用.第一个参数用于指定点序列类型,seq_kind可以为以下类型:点集为0;曲线为CV_SEQ_KIND_CURVE;封闭曲线为CV_SEQ_KIND_CURVE|Cv_SEQ_FLAG_CLOSED.第二个参数是输入的矩阵,该参数是连续的1维向量.矩阵类型必须为cv_32C2或CV_32FC2.
下面的两个参数是指针,指针指向的内容通过该函数填充.contour_header参数对应轮廓结构,一般要事先创建,不过由该函数负责初始化.block参数同样如此,也是由该函数复杂初始化.最后,该函数放回一个类型为CvSeq*的序列指针,指向你输入的序列头*contour_header.返回值跟输入参数相同只是为了使用该函数时更方便,因为这样你就可以将该函数当作某个轮廓函数的参数使用,代码写入同一行.
最后一个平面几个相关的函数是cvPointPolygonTest(),用于测试一个点是否在多边形的内部.如果参数measure_dist非零,函数返回值是点到多边形最近距离.如果measure_dist为0,函数返回+1,-1,0,分别表示在内部,外部,在多边形边上.参数contour可以是序列,也可以是2通道矩阵向量.
再分享一下我老师大神的人工智能教程吧。零基础!通俗易懂!风趣幽默!还带黄段子!希望你也加入到我们人工智能的队伍中来!https://www.cnblogs.com/captainbed
标签:函数的参数 create width htm one vmax 了解 style iter
原文地址:https://www.cnblogs.com/sownchz/p/10167679.html