标签:tac 函数的参数 地址 span col src family 参数 pen
(一)任务状态
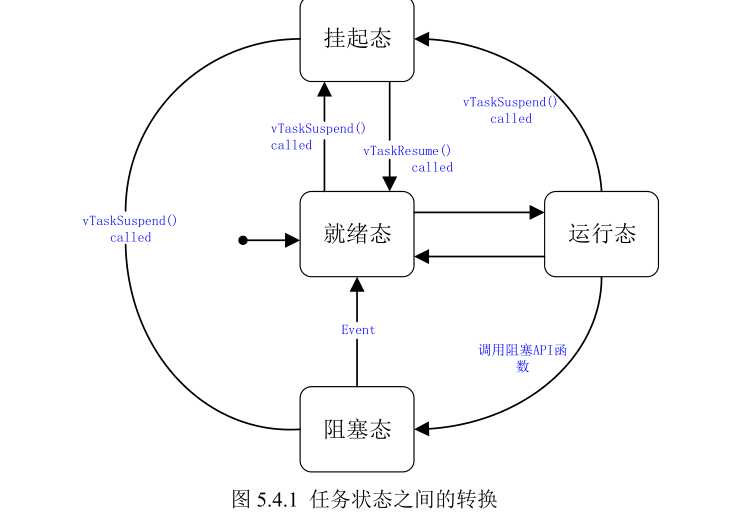
FreeRTOS 中的任务永远处于下面几个状态中的某一个:
● 运行态
当一个任务正在运行时,那么就说这个任务处于运行态,处于运行态的任务就是当前正在
使用处理器的任务。如果使用的是单核处理器的话那么不管在任何时刻永远都只有一个任务处
于运行态。
● 就绪态
处于就绪态的任务是那些已经准备就绪(这些任务没有被阻塞或者挂起),可以运行的任务,
但是处于就绪态的任务还没有运行,因为有一个同优先级或者更高优先级的任务正在运行!
● 阻塞态
如果一个任务当前正在等待某个外部事件的话就说它处于阻塞态,比如说如果某个任务调
用了函数 vTaskDelay()的话就会进入阻塞态,直到延时周期完成。任务在等待队列、信号量、事
件组、通知或互斥信号量的时候也会进入阻塞态。任务进入阻塞态会有一个超时时间,当超过
这个超时时间任务就会退出阻塞态,即使所等待的事件还没有来临!
● 挂起态
像阻塞态一样,任务进入挂起态以后也不能被调度器调用进入运行态,但是进入挂起态的
任务没有超时时间。任务进入和退出挂起态通过调用函数 vTaskSuspend()和 xTaskResume()。
(二)任务优先级
如果所使用的硬件平台支持类似计算前导零这样的指令(可以通过该指令选 择 下 一 个 要 运 行 的 任 务 , Cortex-M 处 理 器 是 支 持 该 指 令 的 ) , 并 且 宏
configUSE_PORT_OPTIMISED_TASK_SELECTION 也 设 置 为 了 1, 那 么 宏configMAX_PRIORITIES 不能超过 32!也就是优先级不能超过 32 级。
优先级数字越低表示任务的优先级越低,0 的优先级最低,configMAX_PRIORITIES-1 的优先级最高。空闲任务的优先级最低,为 0。
(三)任务控制块
FreeRTOS 的每个任务都有一些属性需要存储,FreeRTOS 把这些属性集合到一起用一个结构体来表示,这个结构体叫做任务控制块:TCB_t,在使用函数 xTaskCreate()创建任务的时候就会自动的给每个任务分配一个任务控制块。在老版本的 FreeRTOS 中任务控制块叫做 tskTCB,新版本重命名为 TCB_t,但是本质上还是 tskTCB
(四)任务堆栈
FreeRTOS 之所以能正确的恢复一个任务的运行就是因为有任务堆栈在保驾护航,任务调度器在进行任务切换的时候会将当前任务的现场(CPU 寄存器值等)保存在此任务的任务堆栈中,等到此任务下次运行的时候就会先用堆栈中保存的值来恢复现场,恢复现场以后任务就会接着从上次中断的地方开始运行。创建任务的时候需要给任务指定堆栈,如果使用的函数 xTaskCreate()创建任务(动态方法)的话那么任务堆栈就会由函数 xTaskCreate()自动创建,后面分析 xTaskCreate()的时候会讲解。如果使用函数 xTaskCreateStatic()创建任务(静态方法)的话就需要程序员自行定义任务堆栈,然后堆栈首地址作为函数的参数 puxStackBuffer 传递给函数
标签:tac 函数的参数 地址 span col src family 参数 pen
原文地址:https://www.cnblogs.com/luxiaoguogege/p/10196211.html