标签:ogr 就是 需要 lin 的区别 二维 sha 图片 tps
阅读《计算机视觉中的多视图集合》
本章的关键是理解线和点的对偶性。从射影平面模型出发,IP^2^内的点(a, b ,c)由IP^3^空间中一条过原点的射线k(x1, x2, x3)^T^表示。点采用的是齐次坐标表示,具有相同比例,不同缩放因子的表示都是同一个点,就像射线也可以用同比例,不同缩放因子的向量表示一样。
如果有一个射影变换H,点x变换之后为Hx,那么在同样的变换下,直线I变换为H^-T^I。我们称点的变换为逆变,线的变换为协变。
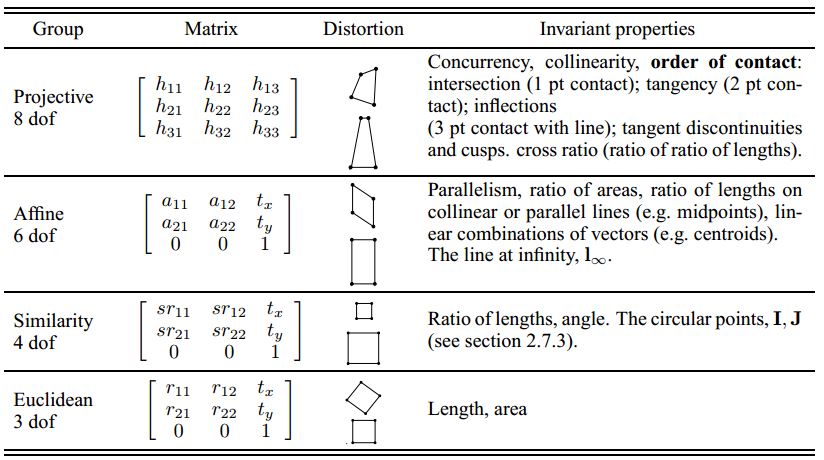
透视变换与射影变换的区别:
与虚圆点对偶的二次曲线:记为\(C^*_{\infty}\),\(C^*_{\infty}=IJ^T+JI^T=\begin{bmatrix} 1 & 0 &0 \\ 0 & 1 & 0\\ 0& 0 & 0 \end{bmatrix}\)。同理,根据对偶定理,二次曲线\(C^*_{\infty}\)为不动曲线的冲要条件为变换为相似变换。
根据结论1.24,对\(C^{*‘}_{\infty}\)进行SVD分解,即可得到一个变换U,用这个U对像进行校正,就会得到一个与H变换之前只相差一个相似变换的结果。这样我们就可以根据相似变换的不动量特性来测量某些数据。
在已经只存在仿射变换的图像中,找到两对在世界平面中正交的直线的像,然后根据结论1.23就可以求出仿射变换矩阵K。这个K把一个与世界平面只差一个相似变换的平面变换到当前仿射变换图像。
标签:ogr 就是 需要 lin 的区别 二维 sha 图片 tps
原文地址:https://www.cnblogs.com/willhua/p/10201962.html