标签:ali val 图片 robot rod proc top mod path
Map and Mapping
(1) map is a spatial model of robot‘s environment
(2) mapping is a process for building a map
(3) consideration for mapping
- map representation
- avalable sensors
- purpose of mapping
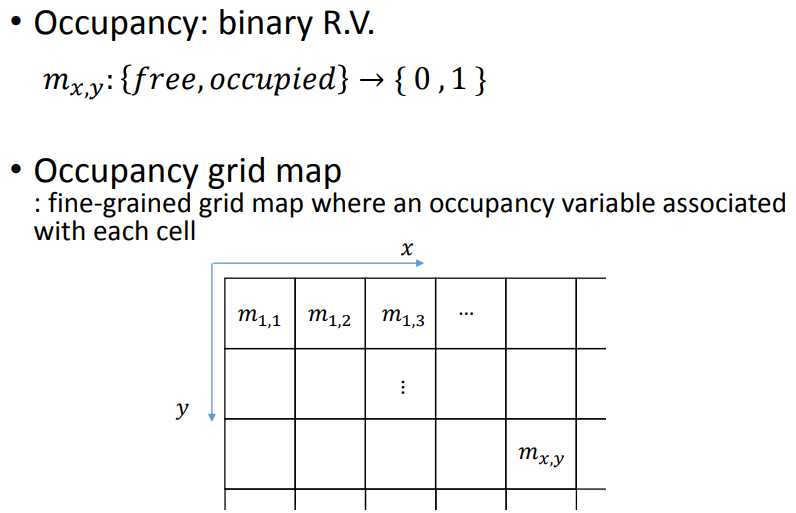
Type of map:
(1) metric map : a localization is represented as a coordinate
(2) topological : Locations are represented as nodes and their connectivity as arcs. Only the connectivity between nodes matter. Graph representation is useful for path planning.
(3) semantic map : semantic map is a map with labels.
What make it challengin?
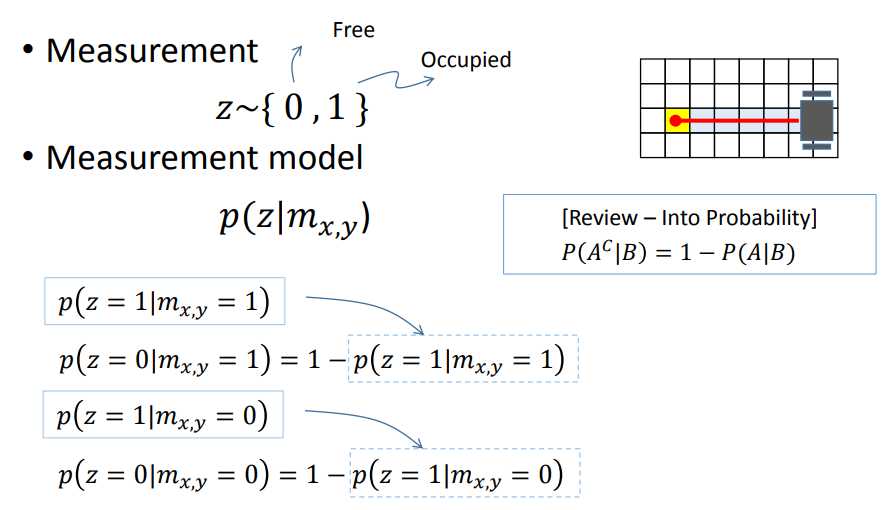
- Noisy measurement in local coordinate
- Motion involved
- Change over time
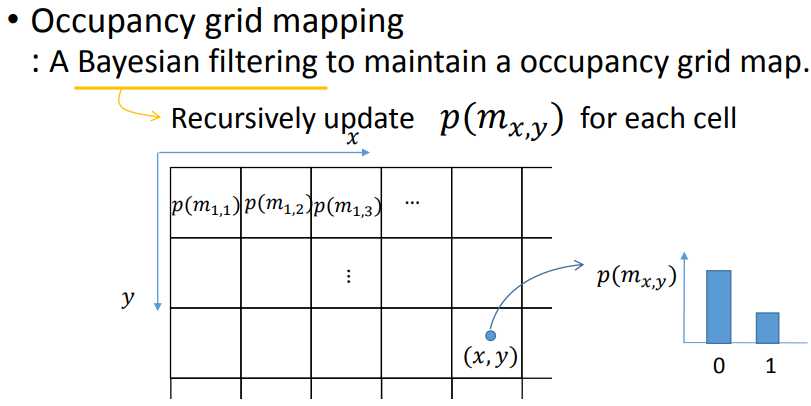
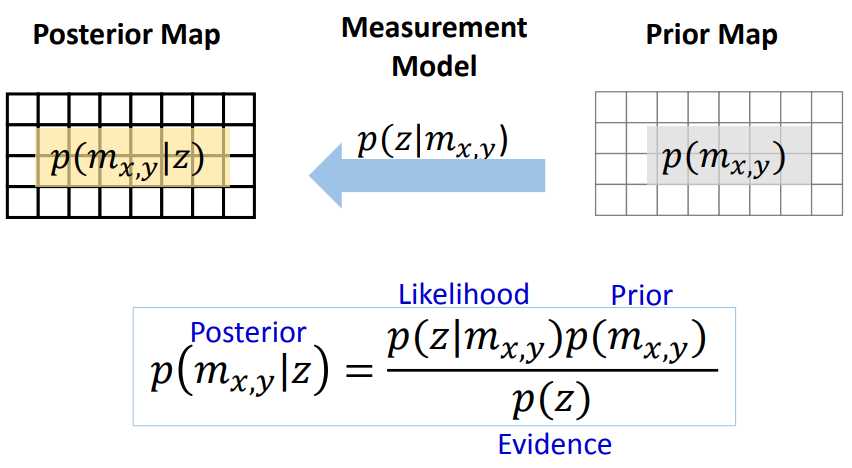
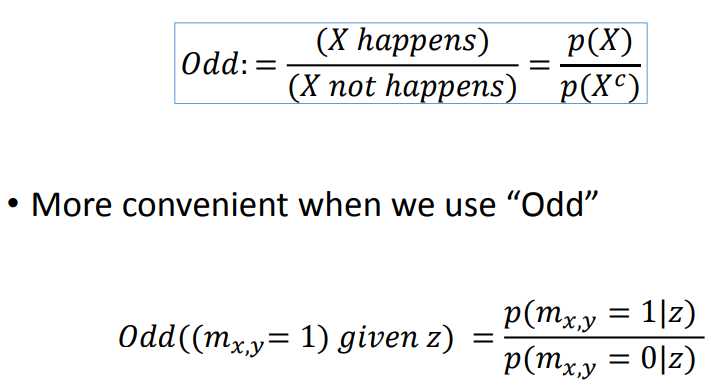
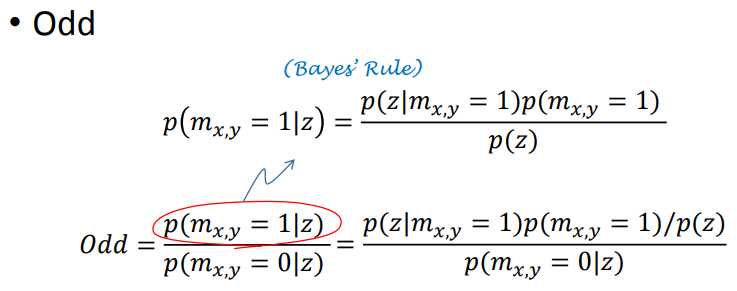
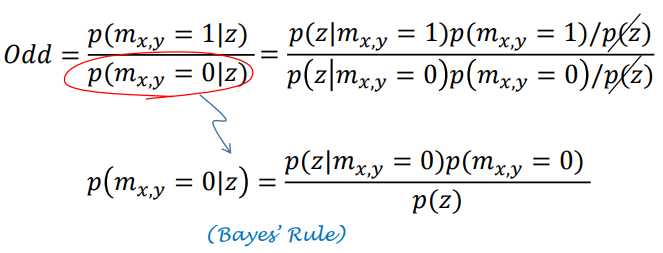
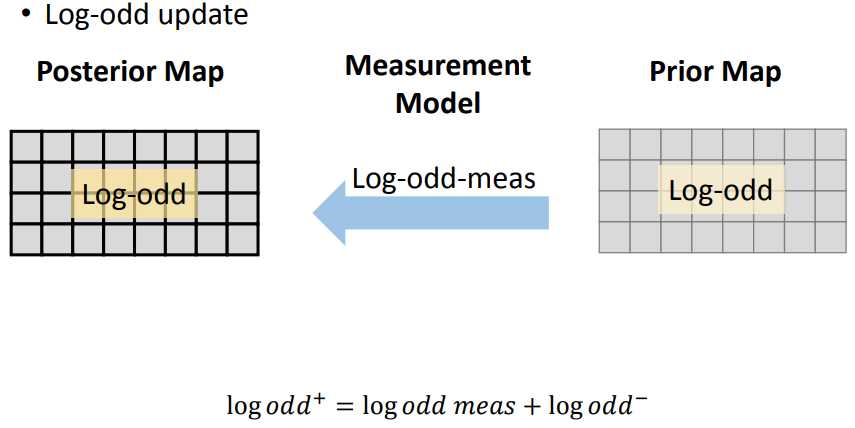
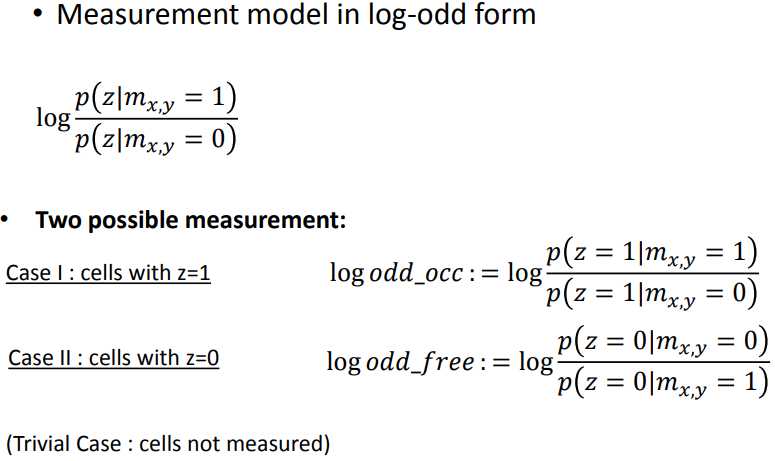
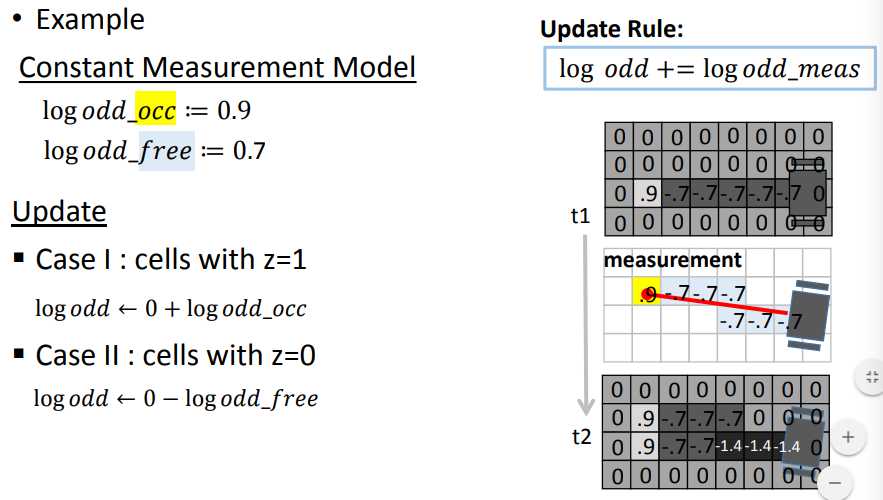
在贝叶斯框架下根据观测模型直接更新每个珊格的占据概率是困难的,引入一个新的变量Odd,赢率,其含义为某件事发生的概率与不发生的概率之比。
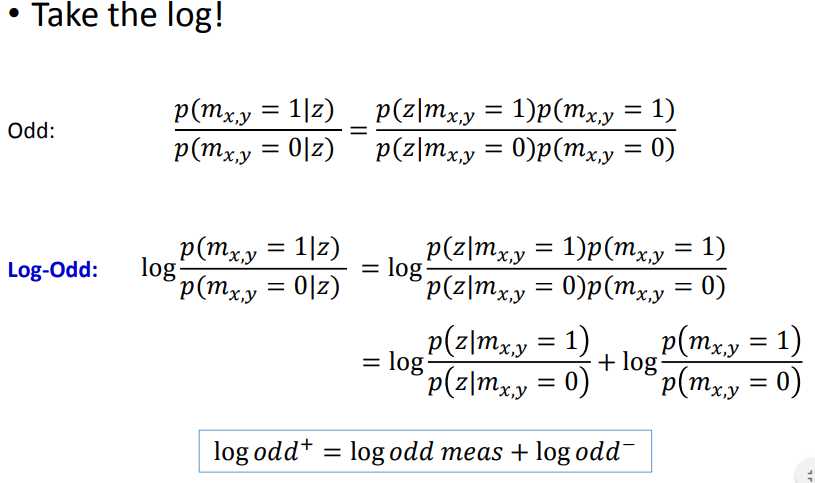
取对数,获得odd的更新方法,即每次观测后都更新先验地图,获得的后验地图将作为下一时刻的先验地图,以此方式不断迭代。
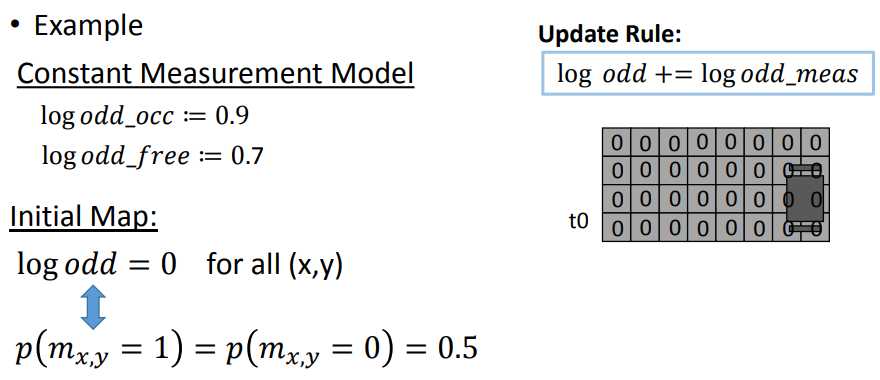
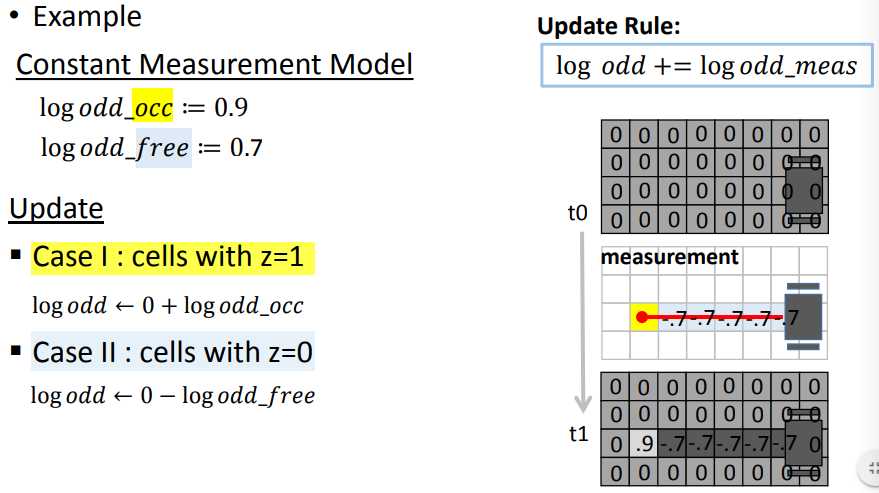
例题:
3.3 3D mapping
标签:ali val 图片 robot rod proc top mod path
原文地址:https://www.cnblogs.com/gdut-gordon/p/10209446.html