标签:[] hold 0.00 ima code src 控制理论 png 预测
卡尔曼滤波在大学课程《现代控制理论》当中有涉及详细讲解。卡尔曼滤波使用条件有:1、线性系统; 2、系统中噪声(不确定性)服从高斯分布。下文中的方差、误差、偏差、协方差都指不确定性的意思。误差 = 偏差;方差 = 偏差 2。在无人驾驶导航定位当中,需要多传感器对汽车位姿进行检测 ;在多传感器融合方面,使用卡尔曼滤波理论较多。
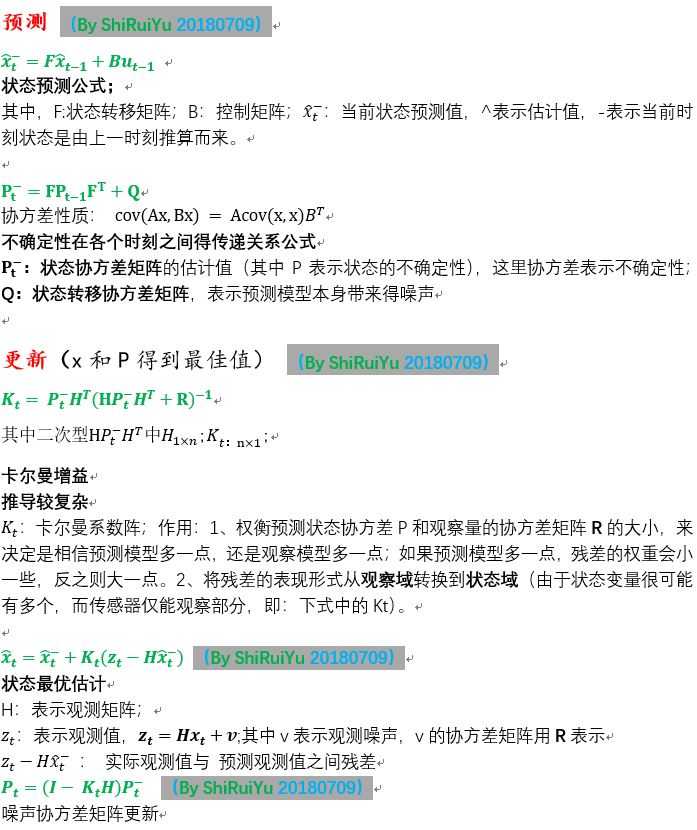
1、5个公式
2、汽车例子
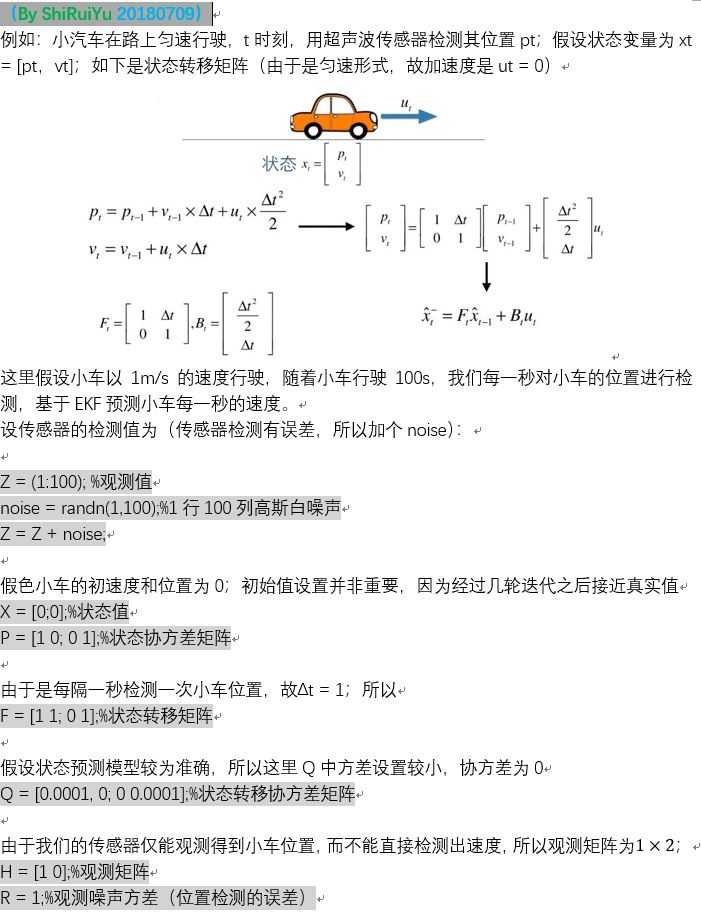
1 clear all; 2 close all; 3 clc; 4 Z = (1:100); %观测值 5 noise = randn(1,100);%1行100列高斯白噪声 6 Z = Z + noise; 7 8 X = [0;0];%状态值 9 P = [1 0; 0 1];%状态协方差矩阵 10 F = [1 1; 0 1];%状态转移矩阵 11 Q = [0.0001, 0; 0 0.0001];%状态转移协方差矩阵 12 H = [1 0];%观测矩阵 13 R = 1;%观测噪声方差 14 15 figure; 16 %hold on; 17 speed = []; 18 distance = []; 19 for i =1:100 20 %% 预测 21 X_ = F*X; 22 P_ = F*P*F‘ + Q; 23 %% 更新 24 K = P_*H‘/(H*P_*H‘ + R); 25 X = X_ + K*(Z(i) - H*X_); 26 P = (eye(2) - K*H)*P_; 27 28 speed(i) = X(2); 29 distance(i) = X(1); 30 %%plot(X(1), X(2)); 31 end 32 plot(distance, speed);
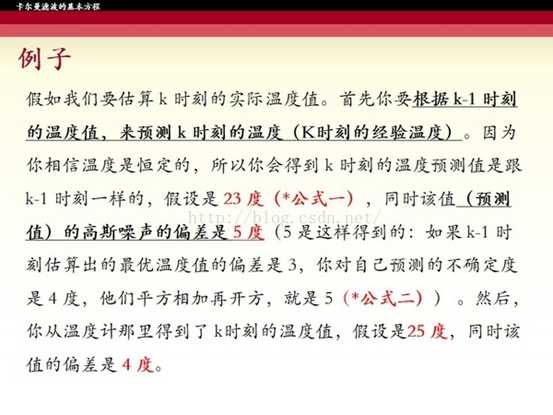
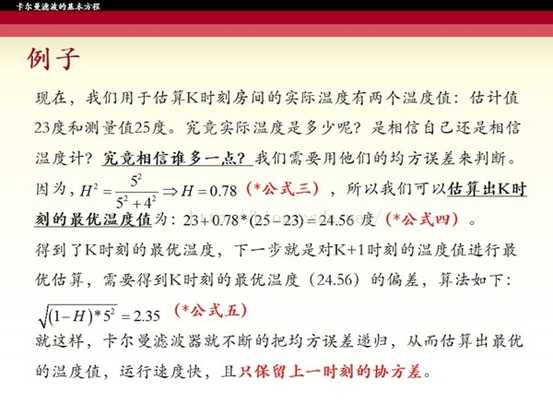
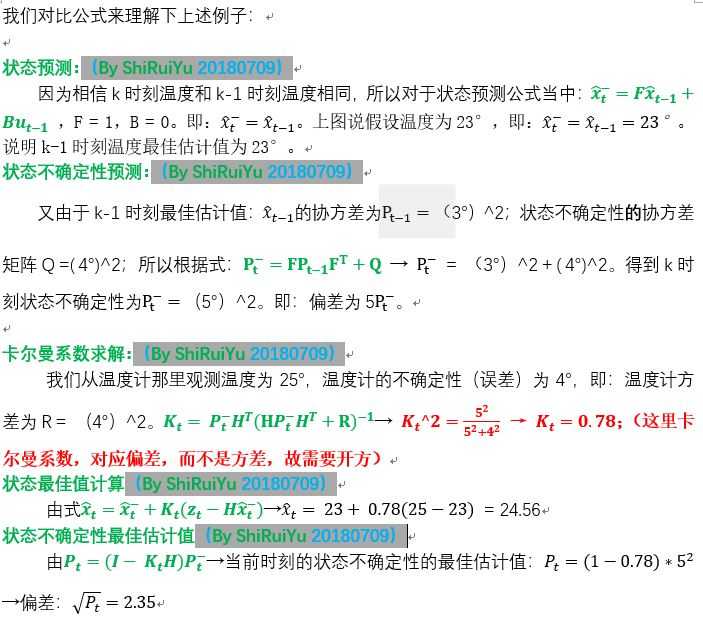
3、温度估计例子
参考:https://blog.csdn.net/u010720661/article/details/63253509
标签:[] hold 0.00 ima code src 控制理论 png 预测
原文地址:https://www.cnblogs.com/winslam/p/10210760.html