标签:提示 地图 ppi map 仿真 src nav 分享 col
前言:无。
cd ~/catkin_ws/src/robot_mrobot/mrobot_gazebo/launch
roslaunch mrobot_laser_nav_gazebo.launch
cd ~/catkin_ws/src/robot_mrobot/mrobot_navigation/launch
roslaunch exploring_slam_demo.launch
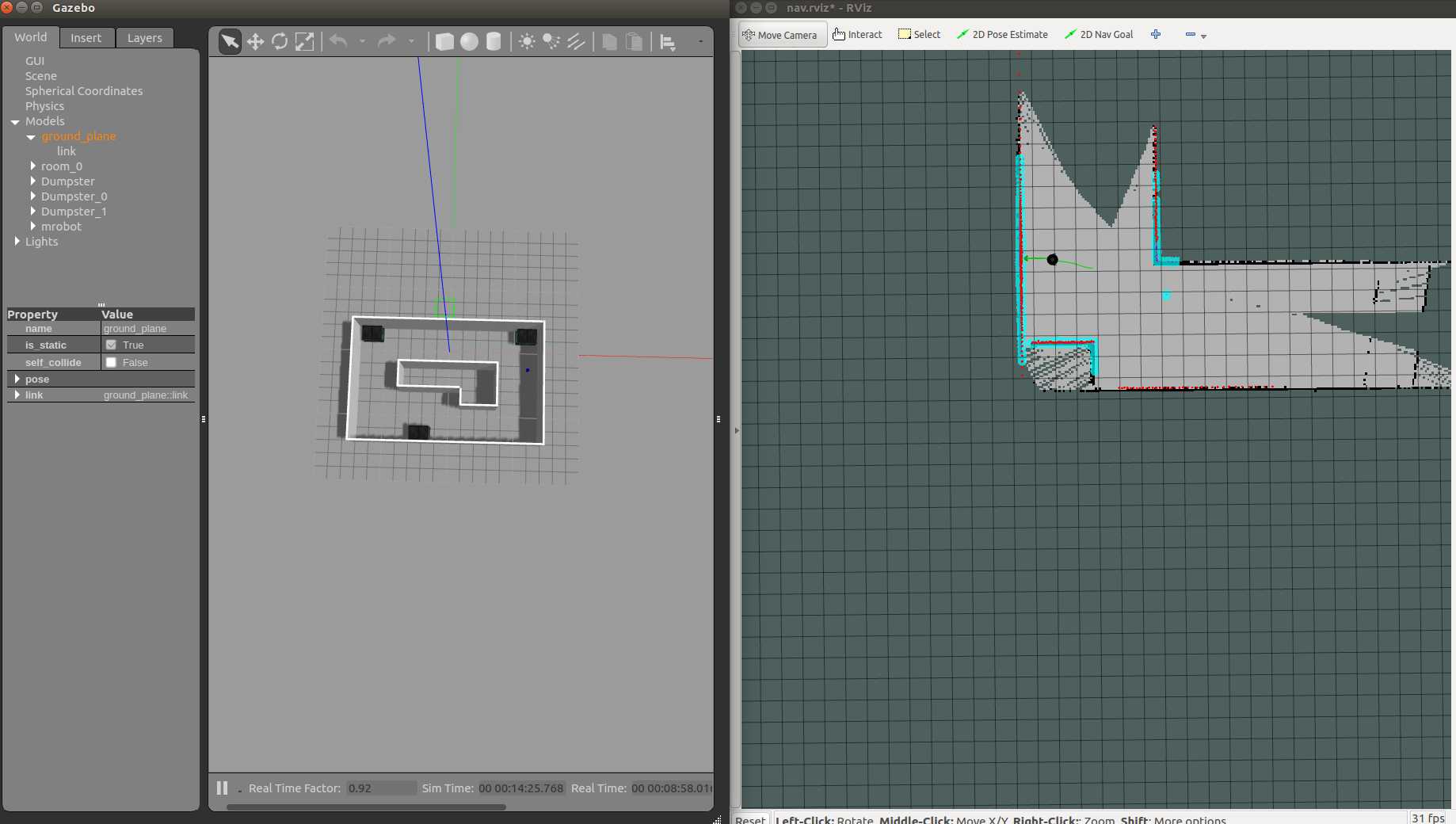
使用rviz的“2D nav goal”手动选择目的地,机器人开始导航,同时使用mapping算法实时构建地图。
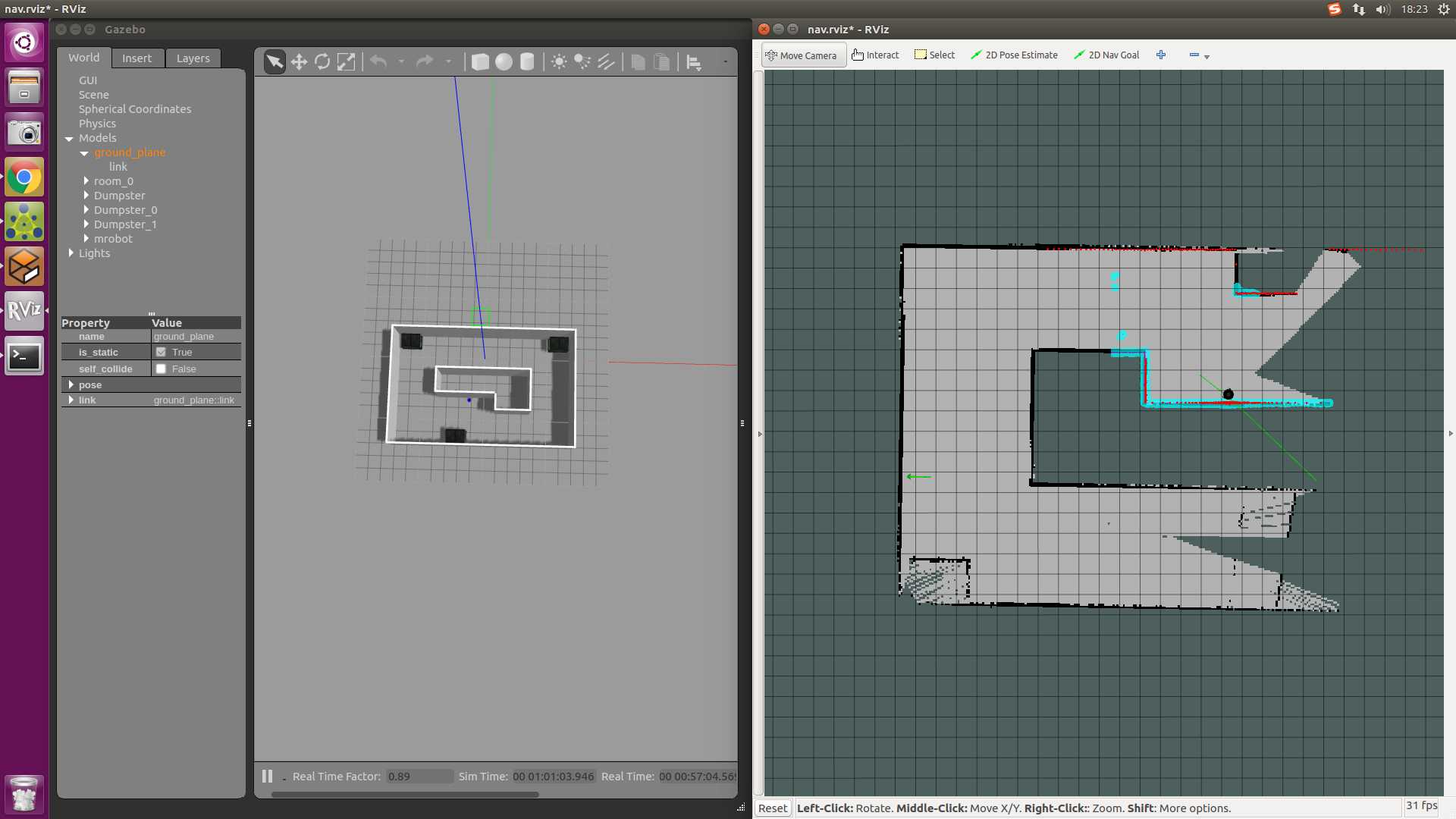
效果如下;
如果多次尝试无果,机器人最终会放弃,终端里将看到错误提示。
rosrun mrobot_navigation random_navigation.py
----------------------------------
显示如下:
-END-
标签:提示 地图 ppi map 仿真 src nav 分享 col
原文地址:https://www.cnblogs.com/chendeqiang/p/10256662.html