标签:span 注意 big 目标 ati 读者 适合 实验 电机
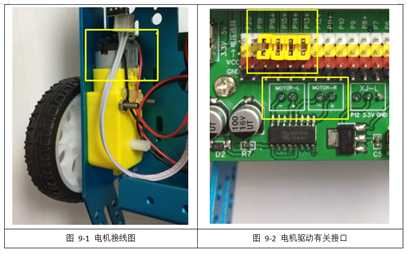
--硬件连接
注:电机的两根接线,红色的贴近金属底盘,黑色的远离金属底盘,燃点科技提供的电机都会按照这个标准统一焊接好,与big:bit上预留的插座完全匹配,组装M-robot时只需要插上插头就可以了,这样也可以与我们提供的程序完全匹配。与直流电机控制相关的四个接口为P13、P14、P15、P16,记得要把这几个的跳线帽连接上。
--实验编程
注:在这里我们使用函数来进行编程,因为直流电机驱动控制相对麻烦,这样我们写成函数以后就方便多了。直流电机驱动采用PWM控制,简单理解起来就是不同的电压对应不同的转速。所以想要控制直流电机的速度,我们通过模拟写入的方式来控制电压就可以了。big:bit扩展板背面的电机控制对应表可以更好地帮助你理解如何控制电机。

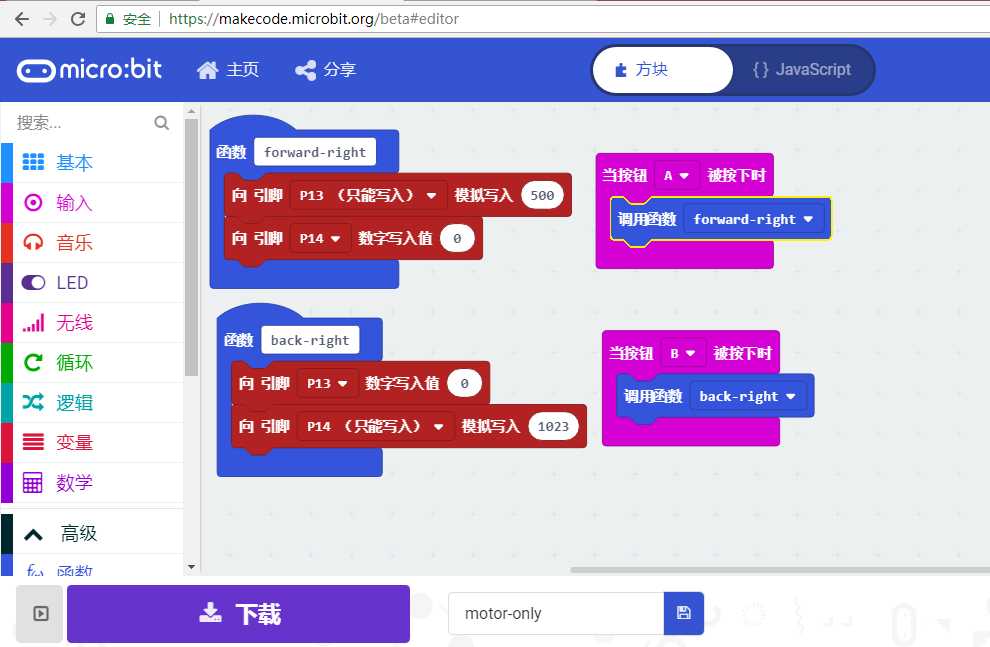
程序网址:https://makecode.microbit.org/_MKkXghC4TFcm
--实验结果
按A键右轮子往前转,但转得较慢;按B键右轮子往后转,但转得较快。
注意事项:
1.驱动直流电机时一定要采用外部供电,不要用micro:bit进行供电,不然容易烧坏电路板。
2.直流电机的两根线加正向电压电机正转,加反向电压电机反转;在承受范围内,加高电压电机转得快,加低电压电机转得慢。
3.直流电机往往需要比较大的电流,所以一般扩展板都会设计上相应的电机驱动芯片,起的就是电流放大的作用。
拓展知识:
机器人上到底用什么电机好?
我们都知道,要让机器人动起来,需要要有个电机。无论是娱乐性双足直立行走机器人,还是轮式机器人,都需要有电机才可能动起来。体型比较大的机器人需要的电机马力比较多,体型小的需要的电机马力较小。机器人的种类繁多,应用到的电机也各不相同。如工厂生产线上用到的机械手,因为对精度要求较高,就需要用到可以实现精密控制的伺服电机,这种电机配有专门的控制器,在控制学上我们称它的控制方式为闭环控制(不了解的读者可不必深究)。也有对精度要求没那个高的机械手,它可能应用一个步进电机就可以了,步进电机是把一圈360度进行了细分,每给一个脉冲就转一个固定的微小角度,通过这种方式也可以实现较精确地控制。还有比如我们在春节晚会上看到的跳舞机器人,它上面应用的是数字舵机,数字舵机可以理解为一个简单的伺服电机,它里面也有自己的控制,只需要外部给目标角度指令就可以了,但舵机一般只用在对扭距要求比较小的场合。你肯定又想到了模拟舵机,模拟舵机跟步进电机有点类似,不能实现精确地控制,输入不同宽度的波形它就会转动不同的角度。最后,要提到的就是直流电机,直流电机是最不能精确控制角度的,给它通电就转,断电就不转(有可能还会滑行),而且通不同的电流,转得快慢也不同,但因为它价格比较便宜,而且不容易损坏,所以适合初学者学习使用。

[20个项目学会BBC micro:bit编程] 19-直流电机控制
标签:span 注意 big 目标 ati 读者 适合 实验 电机
原文地址:https://www.cnblogs.com/microcampus/p/10268065.html