标签:type set ice strong node sum new 一个 ima
前言:launch文件的作用是一次可以启动多个节点。
在chapter2_tutorials包下新建launch文件夹,并在launch文件夹下新建chapter2.launch文件,添加如下代码:
<?xml version="1.0"?>
<launch>
<node name="example1_a1" pkg="chapter2_tutorials" type="example1_a1"/>
<node name="example1_b1" pkg="chapter2_tutorials" type="example1_b1"/>
</launch>
不需要启动roscore,直接执行以下命令,因为launch会自动启动roscore命令:
roslaunch chapter2_tutorials chapter2.launch
-----------------------------------------
显示如下:
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.14
NODES
/
example1_a1 (chapter2_tutorials/example1_a1)
example1_b1 (chapter2_tutorials/example1_b1)
auto-starting new master
process[master]: started with pid [13881]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 12ca110e-0d84-11e9-b214-f44d30974765
process[rosout-1]: started with pid [13894]
started core service [/rosout]
process[example1_a1-2]: started with pid [13906]
process[example1_b1-3]: started with pid [13912]
还记得节点example1_b1会在屏幕上输出从其他节点收到的信息,现在却看不到了,这是因为example1_b使用ROS_INFO输出信息。当在shell中只运行一个节点时,可以看到它。但是当运行启动文件时,则看不到它。
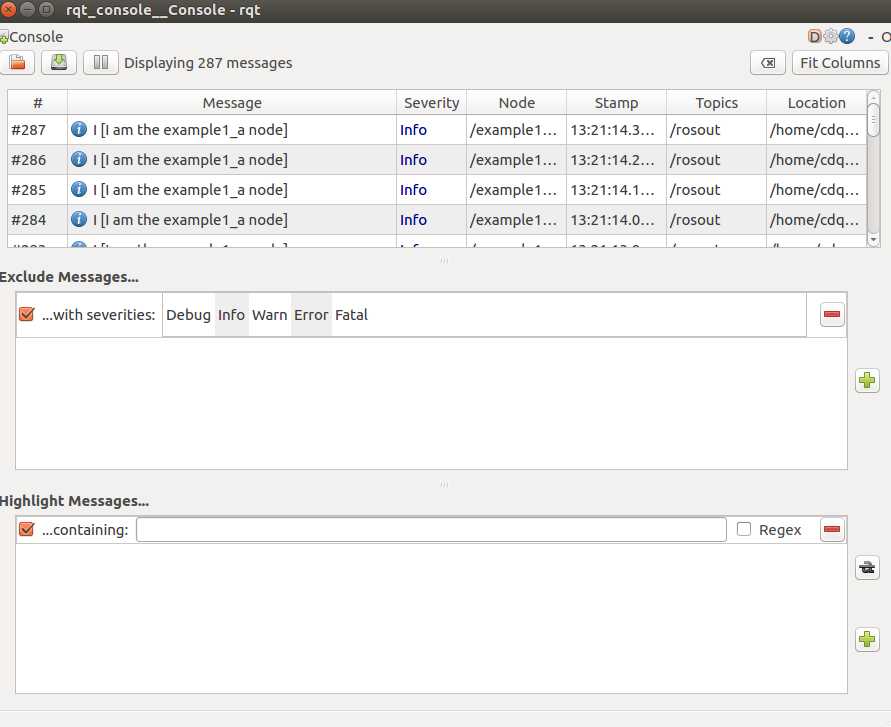
现在为了看到消息,可以运行rqt_console实用程序。
rqt_console
-----------------------------------------
显示如下:
-END-
标签:type set ice strong node sum new 一个 ima
原文地址:https://www.cnblogs.com/chendeqiang/p/10328255.html