标签:http 倍频 lsp 数值 人机界面 程序 mil 一周 cell
设备传动机构的伺服传动机构,需要计算传动机构的关系。在人机界面设置的数据体现在机构的移动距离上,而传动而是伺服驱动器、PLC数据计算与转换达到我们需要的效果。
我们以几种的传动机机构一一举例说明
一、减速机直接机构
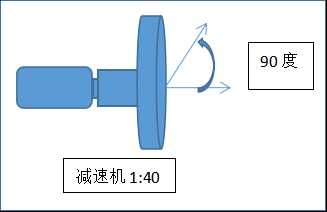
一般情况下,在人机界面设置的单位是度,以1度为最小数值。
那么伺服驱动器一周脉冲数设置数为X,用下列公式去计算
计算得出一周脉冲数是9,但这个数值比较小,不利于伺服的精度。我们可以放大1000倍,即一周脉冲数设置9000,人机界面不需要放大位数,因为放大之后数位太多,不好理解。那么需要程序距离与速度的数据放大1000倍就可以。
|
伺服一周脉冲数 |
9000 |
|
程序距离与速度放大倍数 |
1000 |
|
触摸屏设置移动距离 |
90度 |
二、减速机-同步轮-同步带
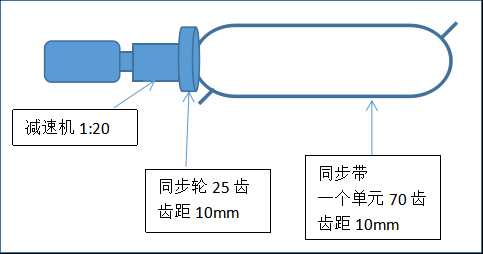
一般情况下,在人机界面设置的单位是毫米,以1mm为最小数值。
那么伺服驱动器一周脉冲数设置数为X,用下列公式去计算
计算得出一周脉冲数是1.25,但这个数值比较小,不利于伺服的精度。我们可以放大1000倍,即一周脉冲数设置1250,人机界面不需要放大位数,因为放大之后数位太多,不好理解。那么需要程序距离与速度的数据放大1000倍就可以。
|
伺服一周脉冲数 |
1250 |
|
程序距离与速度放大倍数 |
1000 |
|
触摸屏设置移动距离 |
700mm |
三、减速机-齿轮-链条
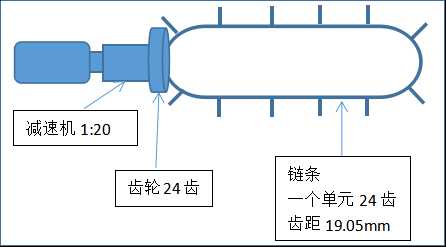
一般情况下,在人机界面设置的单位是毫米,以1mm为最小数值。
那么伺服驱动器一周脉冲数设置数为X,用下列公式去计算
计算得出一周脉冲数是22.86,但这个数值比较小,不利于伺服的精度。我们可以放大100倍,即一周脉冲数设置2286,人机界面不需要放大位数,因为放大之后数位太多,不好理解。那么需要程序距离与速度的数据放大100倍就可以。
|
伺服一周脉冲数 |
2286 |
|
程序距离与速度放大倍数 |
100 |
|
触摸屏设置移动距离 |
457.2mm |
四、滑轮-齿轮
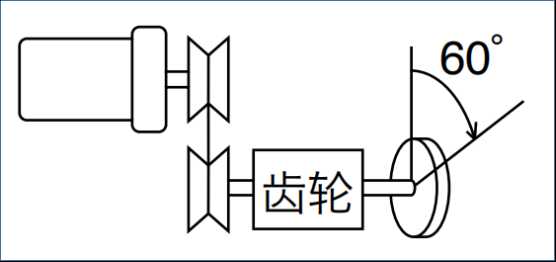
滑轮比 齿轮比 总和减速比
从客户的上位控制器输入10000脉冲的指令脉冲到驱动器时,输出轴旋转60度
用分子/分母设定指令分倍频
|
分子 |
9568256 |
|
分母 |
3375 |
|
触摸屏设置移动距离 |
60度 |
标签:http 倍频 lsp 数值 人机界面 程序 mil 一周 cell
原文地址:https://www.cnblogs.com/theta/p/10333949.html