标签:style blog http color io os ar for strong
EPZS(Enhance Predictive Zonal Search) 增强预测区域搜索,是一种整像素运动估计的搜索算法。
EPZS采用的是相关性较高的预测方法。这里的相关性较高是指,更多地根据已有的条件,来进行运动向量的预测(如采用相邻块的mv作为当前搜索块的mv进行预测)。
Search Set
在搜索范围内的所有mv,可以被归结为集合$S$,EPZS会从$S$中按照其算法的规律来选择特定的子集$S’$。$S’$可以包含以下几种搜索方式。
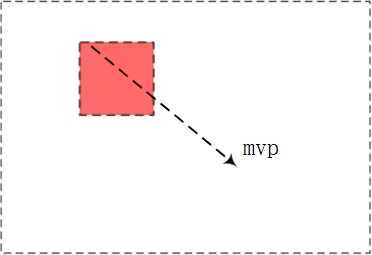
1.$S_1$,mvp,(0, 0)
$mv_{prev} , mv(0, 0)$
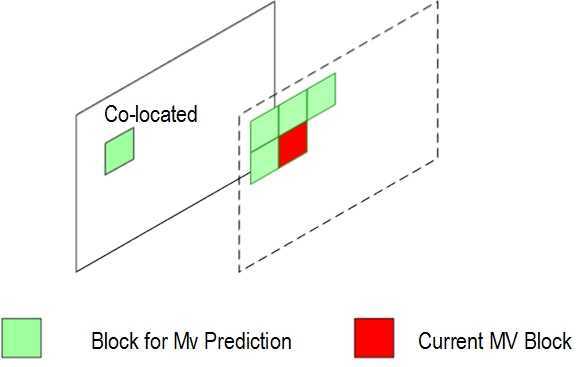
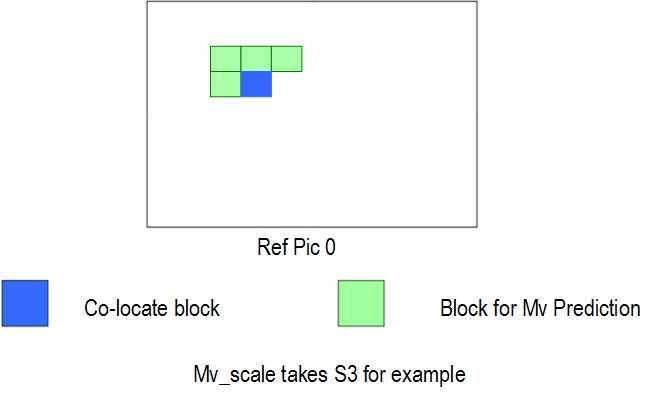
2.$S_2$,当前块的相邻块mv,包括ABCD四个mv,co-located块mv,做mv_scale,即对于POC的距离进行比例增减。
$mv_a,mv_b,mv_c,mv_d,mv_{co}$
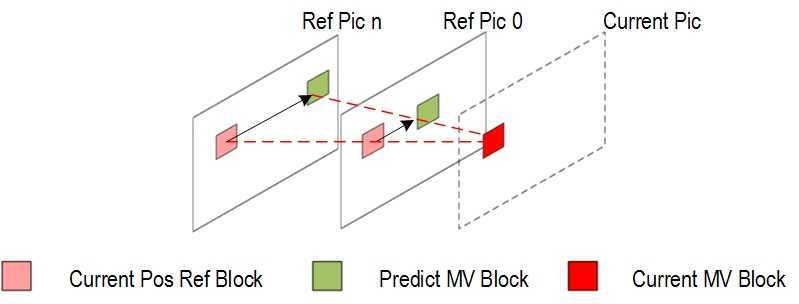
3.$S_3$,这种方式基于第0个参考图像的mv,当前参考图像的mv需要由ref0的mv以POC的距离做mv_scale后得到
$mv_{refn} = {mv_{ref0}} \cdot {\frac{POC_{cur}-POC_{n}}{POC_{cur}-POC_{0}}}$
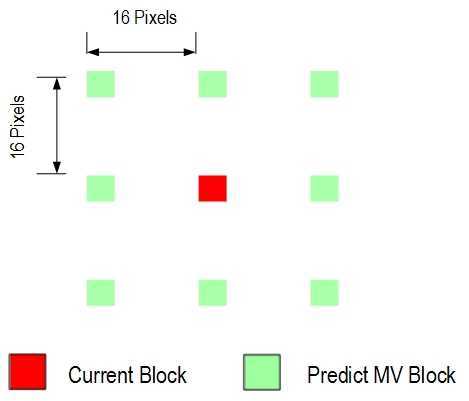
4.$S_4$,以mvp或者(0, 0)为中心,呈正方形窗口的mv集合
$mv_{window}$
5.$S_5$,由于运动有可能不是匀速地运动,而是以相同加速度来进行,因此可以用前两张编码图像的mv计算出当前mv
$mv_{cur} = mv_{t-1} + (mv_{t-1} - mv_{t-2})$

6.$S_6$,co-located块的相邻mv,需做mv_scale
$mv_{cola},mv_{colb},mv_{colc},mv_{cold}$
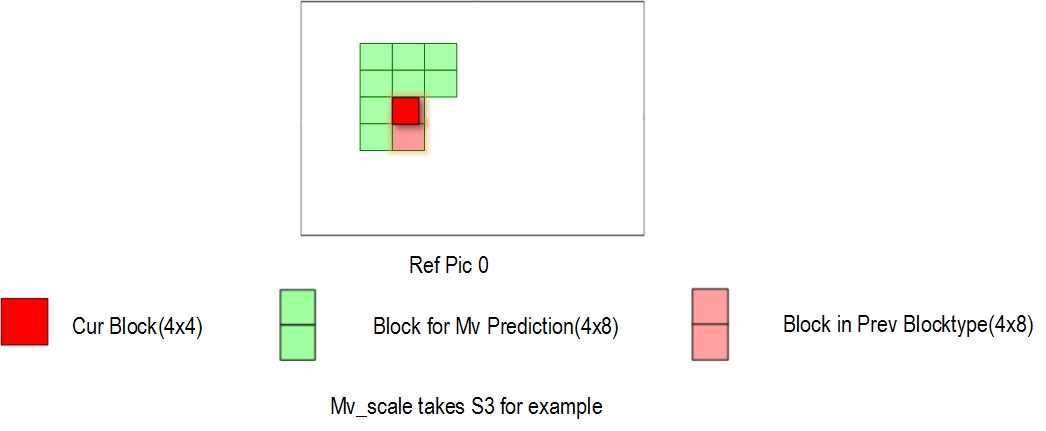
7.$S_7$,Memory Prediction即采用同一块位置中,上一个块类型(Block type - 1)做预测得到的mv,采用其相邻mv,做mv_scale
$mv_{preva},mv_{prevb},mv_{prevc},mv_{prevd}$
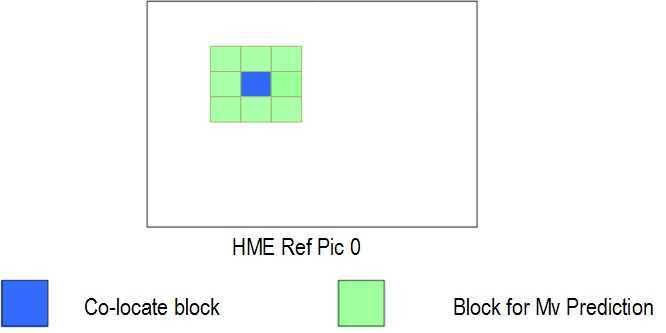
8.$S_8$,如果采用的是HME(Hierarchical Motion Estimation)分层运动估计的编码方式,那么应该选择该次HME运动估计的参考图像,从参考图像中选择co-located块,以及co-located块周边的块(带col块共9个块)的mv作为候选mv
$mv_{hme\_co},mv_{hme\_surround\_of\_co}$
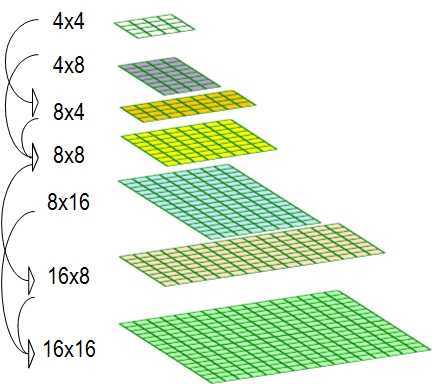
9.$S_9$,上层块mv,做mv_scale
$mv_{4 \times 4} = mv_{8 \times 4},mv_{8 \times 4} = mv{8 \times 8},…$
从如上的mv集合明显看出,基本上,如果当前mv是由参考图像已有mv预测出来的情况,都需要进行mv_scale,以此提高mv预测的准确性。
在预测完所有mv的可能位置后,得到mv集合$S$,由于此处进行的是整像素预测,所以需要对mv求整。接下来需要在$S$中求出mv_cost最小的mv,当然,mv需要在search range内。
Termination
Termination用于判断当前mv预测是否满足停止条件(mv_cost < stopCriterion),满足则代表当前mv预测已经足够准确,可以退出。
1.在求出第一个子集$S_1$的mv_cost后,进行第一次Termination,记为$T_1$。$T_1$是由当前块类型的像素点个数(如16x16像素点个数为256)与lambda联合组成。JM18.6中$T_1$,即stopCriterion的值为如下形式:
$stopCriterion = (N_{pixel} \times \frac{3}{4}) \times 2^{LAMBDA\_ACCURACY\_BITS} + LAMBDA\_DIST $
2.如果第一个停止条件不能满足,则接下来需要对所有的mv集合进行预测,从中选出mv_cost最小的mv。在得到最小mv后,进行第二次Termination,记为$T_2$。$T_2$由3块类型的相邻块中最小SAD,用$stopCriterion_{T_1}$修正计算得来。
首先定义上界与下界:
$Upper = (N_{pixel} \times 3) \times 2^{LAMBDA\_ACCURACY\_BITS} + LAMBDA\_DIST $
$Lower = (N_{pixel} \times \frac{1}{4}) \times 2^{LAMBDA\_ACCURACY\_BITS} + LAMBDA\_DIST $
上下界修正:
$tmpStopCriterion = Mid( Min(SAD_A,SAD_B,SAD_C), Upper, Lower)$
StopCriterion修正:
$stopCriterion = \frac{(Max(tmpStopCriterion, stopCriterion) \times 8 + stopCriterion)}{8} + LAMBDA\_DIST $
3.如果第二个停止条件仍然不满足,接下来进行最后的小区域搜索,搜索方式有菱形,正方形,大菱形等。如果搜索得到最佳mv为菱形(或正方形)的中心点,则停止搜索,得到最终的最佳整数mv。可以参考http://www.cnblogs.com/TaigaCon/p/3788984.html
相对于UMHS,EPZS更多地考虑了运动的相关性,基本上采用的都是用已得到的mv预测当前mv,这种方式在规律运动图像的预测中会比UMHS更有效率。但是UMHS的预测更加考虑周全,对搜索范围进行了更细密的搜索,一旦碰上无规律运动图像,UMHS预测可以得到比EPZS更准确的预测效果。因此,根据图像性质来选择不同的搜索算法将能更好地提升编码质量。
jm18.6:

/*! *********************************************************************** * \brief * FAST Motion Estimation using EPZS * AMT/HYC *********************************************************************** */ distblk // ==> minimum motion cost after search EPZS_motion_estimation (Macroblock * currMB, // <-- current Macroblock MotionVector * pred_mv, // <-- motion vector predictor in sub-pel units MEBlock * mv_block, // <-- motion vector information distblk min_mcost, // <-- minimum motion cost (cost for center or huge value) int lambda_factor // <-- lagrangian parameter for determining motion cost ) { Slice *currSlice = currMB->p_Slice; VideoParameters *p_Vid = currMB->p_Vid; InputParameters *p_Inp = currMB->p_Inp; EPZSParameters *p_EPZS = currSlice->p_EPZS; PicMotionParams **motion = p_Vid->enc_picture->mv_info; int blocktype = mv_block->blocktype; int list = mv_block->list; int cur_list = list + currMB->list_offset; short ref = mv_block->ref_idx; MotionVector *mv = &mv_block->mv[list]; SearchWindow *searchRange = &mv_block->searchRange; int mapCenter_x = searchRange->max_x - mv->mv_x; int mapCenter_y = searchRange->max_y - mv->mv_y; StorablePicture *ref_picture = currSlice->listX[cur_list][ref]; distblk lambda_dist = weighted_cost(lambda_factor, 2); distblk stopCriterion = p_EPZS->medthres[blocktype] + lambda_dist; distblk *prevSad = &p_EPZS->distortion[cur_list][blocktype - 1][mv_block->pos_x2]; MotionVector *p_motion = NULL; //only work for EPZSSpatialMem EPZSStructure *searchPatternF = p_EPZS->searchPattern; uint16 **EPZSMap = &p_EPZS->EPZSMap[mapCenter_y]; uint16 *EPZSPoint = &p_EPZS->EPZSMap[searchRange->max_y][searchRange->max_x]; MotionVector center = pad_MVs (*mv, mv_block); MotionVector pred = pad_MVs (*pred_mv, mv_block); MotionVector tmp = *mv, cand = center; ++p_EPZS->BlkCount; if (p_EPZS->BlkCount == 0) ++p_EPZS->BlkCount; if (p_Inp->EPZSSpatialMem) { #if EPZSREF p_motion = &p_EPZS->p_motion[cur_list][ref][blocktype - 1][mv_block->block_y][mv_block->pos_x2]; #else p_motion = &p_EPZS->p_motion[cur_list][blocktype - 1][mv_block->block_y][mv_block->pos_x2]; #endif } // Clear EPZSMap // memset(EPZSMap[0],FALSE,searcharray*searcharray); // Check median candidate; //p_EPZS->EPZSMap[0][0] = p_EPZS->BlkCount; *EPZSPoint = p_EPZS->BlkCount; //--- initialize motion cost (cost for motion vector) and check --- //(0,0)作为mv min_mcost = mv_cost (p_Vid, lambda_factor, &cand, &pred); //--- add residual cost to motion cost --- min_mcost += mv_block->computePredFPel (ref_picture, mv_block, DISTBLK_MAX - min_mcost, &cand); // Additional threshold for ref>0 if ((ref > 0 && currSlice->structure == FRAME) && (*prevSad < distblkmin (p_EPZS->medthres[blocktype] + lambda_dist, min_mcost))) {//满足返回条件 #if EPZSREF if (p_Inp->EPZSSpatialMem) #else if (p_Inp->EPZSSpatialMem && ref == 0) #endif { *p_motion = tmp; } return min_mcost; } //! If p_EPZS->medthres satisfied, then terminate, otherwise generate Predictors //! Condition could be strengthened by consideration distortion of adjacent partitions. if (min_mcost > stopCriterion) { SPoint *p_EPZS_point = p_EPZS->predictor->point; Boolean checkMedian = FALSE; distblk second_mcost = DISTBLK_MAX; distblk mcost; int prednum = 5; int conditionEPZS; MotionVector tmp2 = {0, 0}, tmv; int pos; short invalid_refs = 0; stopCriterion = EPZSDetermineStopCriterion (p_EPZS, prevSad, mv_block, lambda_dist); if (min_mcost < (stopCriterion >> 1)) { #if EPZSREF if (p_Inp->EPZSSpatialMem) #else if (p_Inp->EPZSSpatialMem && ref == 0) #endif { *p_motion = tmp; } return min_mcost; } //! Add Spatial Predictors in predictor list. //! Scheme adds zero, left, top-left, top, top-right. Note that top-left adds very little //! in terms of performance and could be removed with little penalty if any. //当前块相邻mv,做mv_scale invalid_refs = EPZS_spatial_predictors (p_EPZS, mv_block, list, currMB->list_offset, ref, motion); //当前类型的block_type(8x4)的上一个block_type(8x8),相同位置留下来的mv,采用其相邻mv /* * * +--------+----+----+ * | | B | * | |____A____| * | | | * | | | * | +----+----+ * | | * | | * | | * | | * +------------------+ * * B : 8x4 A 8x8 * macroblock * *memory_mv_b = surrounding_of_mv_a *采用mv_a的相邻mv * */ if (p_Inp->EPZSSpatialMem) EPZS_spatial_memory_predictors (p_EPZS, mv_block, cur_list, &prednum, ref_picture->size_x >> 2); //if (p_Inp->HMEEnable == 1 && p_Inp->EPZSUseHMEPredictors == 1 && blocktype == 4) //if (p_Inp->HMEEnable == 1 && p_Inp->EPZSUseHMEPredictors == 1 && (currSlice->slice_type == P_SLICE || currSlice->slice_type == SP_SLICE || p_Inp->EnableReorderBslice) ) //如果采用HME(Hierarchical Motion Estimate),即B帧的参考图像选择方式有所不同 //选择此时的分层参考图像(Hierarchical ref pic)对应块的相邻mv if (p_Inp->HMEEnable == 1 && p_Inp->EPZSUseHMEPredictors == 1) EPZS_hierarchical_predictors (p_EPZS, mv_block, &prednum, ref_picture, currSlice); #if (MVC_EXTENSION_ENABLE) if ( p_Inp->EPZSTemporal[currSlice->view_id] && blocktype < 5 ) #else // Temporal predictors //colocate块的相邻块mv if (p_Inp->EPZSTemporal && blocktype < 5) #endif { EPZS_temporal_predictors (currMB, ref_picture, p_EPZS, mv_block, &prednum, stopCriterion, min_mcost); } //! Window Size Based Predictors //! Basically replaces a Hierarchical ME concept and helps escaping local minima, or //! determining large motion variations. //! Following predictors can be adjusted further (i.e. removed, conditioned etc) //! based on distortion, correlation of adjacent MVs, complexity etc. These predictors //! and their conditioning could also be moved after all other predictors have been //! tested. Adaptation could also be based on type of material and coding mode (i.e. //! field/frame coding,MBAFF etc considering the higher dependency with opposite parity field //conditionEPZS = ((min_mcost > stopCriterion) // && (p_Inp->EPZSFixed > 1 || (p_Inp->EPZSFixed && currSlice->slice_type == P_SLICE))); //conditionEPZS = ((ref == 0) && (blocktype < 5) && (min_mcost > stopCriterion) //&& (p_Inp->EPZSFixed > 1 || (p_Inp->EPZSFixed && currSlice->slice_type == P_SLICE))); //conditionEPZS = ((min_mcost > stopCriterion) && ((ref < 2 && blocktype < 4) conditionEPZS = (p_Inp->EPZSFixed == 3 && (currMB->mb_x == 0 || currMB->mb_y == 0)) || ((min_mcost > 3 * stopCriterion) && ((ref < 2 && blocktype < 4) || (ref < 1 && blocktype == 4) || ((currSlice->structure != FRAME || currMB->list_offset) && ref < 3)) && (p_Inp->EPZSFixed > 1 || (p_Inp->EPZSFixed && currSlice->slice_type == P_SLICE))); //正方形窗口mv if (conditionEPZS) EPZSWindowPredictors (mv, p_EPZS->predictor, &prednum, (p_Inp->EPZSAggressiveWindow != 0) || ((blocktype < 5) && (invalid_refs > 2) && (ref < 1 + (currSlice->structure != FRAME || currMB->list_offset))) ? p_EPZS->window_predictor_ext : p_EPZS->window_predictor); //! Blocktype/Reference dependent predictors. //! Since already mvs for other blocktypes/references have been computed, we can reuse //! them in order to easier determine the optimal point. Use of predictors could depend //! on cost, //conditionEPZS = (ref == 0 || (ref > 0 && min_mcost > stopCriterion) || currSlice->structure != FRAME || currMB->list_offset); conditionEPZS = (ref == 0 || (ref > 0 && min_mcost > 2 * stopCriterion)); //上层宏块mv,做mv_scale if (conditionEPZS && currMB->mbAddrX != 0 && p_Inp->EPZSBlockType) EPZSBlockTypePredictorsMB (currSlice, mv_block, p_EPZS_point, &prednum); //! Check all predictors //循环内,对所有的cand mv(S1,S2,S3,S4)做cost.取出最佳mv for (pos = 0; pos < prednum; ++pos) { tmv = p_EPZS_point[pos].motion; set_integer_mv(&tmv); //if (((iabs (tmv.mv_x - mv->mv_x) > searchRange->max_x || iabs (tmv.mv_y - mv->mv_y) > searchRange->max_y)) && (tmv.mv_x || tmv.mv_y)) if ((iabs (tmv.mv_x - mv->mv_x) - searchRange->max_x <= 0) && (iabs (tmv.mv_y - mv->mv_y) - searchRange->max_y <= 0)) { EPZSPoint = &EPZSMap[tmv.mv_y][mapCenter_x + tmv.mv_x]; if (*EPZSPoint != p_EPZS->BlkCount) { *EPZSPoint = p_EPZS->BlkCount; cand = pad_MVs (tmv, mv_block); //--- set motion cost (cost for motion vector) and check --- mcost = mv_cost (p_Vid, lambda_factor, &cand, &pred); if (mcost < second_mcost) { mcost += mv_block->computePredFPel (ref_picture, mv_block, second_mcost - mcost, &cand); //--- check if motion cost is less than minimum cost --- if (mcost < min_mcost) { tmp2 = tmp; tmp = tmv; second_mcost = min_mcost; min_mcost = mcost; checkMedian = TRUE; } //else if (mcost < second_mcost && (tmp.mv_x != tmv.mv_x || tmp.mv_y != tmv.mv_y)) else if (mcost < second_mcost) { tmp2 = tmv; second_mcost = mcost; checkMedian = TRUE; } } } } } //! Refine using EPZS pattern if needed //! Note that we are using a conservative threshold method. Threshold //! could be tested after checking only a certain number of predictors //! instead of the full set. Code could be easily modified for this task. if (min_mcost > stopCriterion) { const int mv_range = 10; int patternStop = 0, pointNumber = 0, checkPts, nextLast = 0; int totalCheckPts = 0, motionDirection = 0; //! Adapt pattern based on different conditions. if (p_Inp->EPZSPattern != 0) { if ((min_mcost < stopCriterion + ((3 * p_EPZS->medthres[blocktype]) >> 1))) { if ((tmp.mv_x == 0 && tmp.mv_y == 0) || (iabs (tmp.mv_x - mv->mv_x) < (mv_range) && iabs (tmp.mv_y - mv->mv_y) < (mv_range))) searchPatternF = p_Vid->sdiamond; else searchPatternF = p_Vid->square; } else if (blocktype > 4 || (ref > 0 && blocktype != 1)) searchPatternF = p_Vid->square; else searchPatternF = p_EPZS->searchPattern; } //! center on best predictor center = tmp; for (;;) { totalCheckPts = searchPatternF->searchPoints; do {//循环对得到的最佳mv是做小范围搜索:square,dimond,etc. checkPts = totalCheckPts; do {//循环对小范围进行各个像素点的搜索 tmv = add_MVs (center, &(searchPatternF->point[pointNumber].motion)); if (((iabs (tmv.mv_x - mv->mv_x) - searchRange->max_x) <= 0) && ((iabs (tmv.mv_y - mv->mv_y) - searchRange->max_y) <= 0)) { //EPZSMap用于记录当前点是否被搜索过,一旦搜索过,则不再搜索,这样的话就不会跟//! Check all predictors重复了 EPZSPoint = &EPZSMap[tmv.mv_y][mapCenter_x + tmv.mv_x]; if (*EPZSPoint != p_EPZS->BlkCount) { *EPZSPoint = p_EPZS->BlkCount; cand = pad_MVs (tmv, mv_block); mcost = mv_cost (p_Vid, lambda_factor, &cand, &pred); if (mcost < min_mcost) { mcost += mv_block->computePredFPel (ref_picture, mv_block, min_mcost - mcost, &cand); if (mcost < min_mcost) { tmp = tmv; min_mcost = mcost; motionDirection = pointNumber; } } } } ++pointNumber; if (pointNumber >= searchPatternF->searchPoints) pointNumber -= searchPatternF->searchPoints; checkPts--; } while (checkPts > 0); //对得到的最佳mv,如果是center(第一次的center是mvp),则停止当前循环 if (nextLast || ((tmp.mv_x == center.mv_x) && (tmp.mv_y == center.mv_y))) { patternStop = searchPatternF->stopSearch; searchPatternF = searchPatternF->nextpattern; totalCheckPts = searchPatternF->searchPoints; nextLast = searchPatternF->nextLast; motionDirection = 0; pointNumber = 0; } else { totalCheckPts = searchPatternF->point[motionDirection].next_points; pointNumber = searchPatternF->point[motionDirection].start_nmbr; center = tmp; } } while (patternStop != 1); if ((ref > 0) && (currSlice->structure == FRAME) && ((4 * *prevSad < min_mcost) || ((3 * *prevSad < min_mcost) && (*prevSad <= stopCriterion)))) { *mv = tmp; #if EPZSREF if (p_Inp->EPZSSpatialMem) #else if (p_Inp->EPZSSpatialMem && ref == 0) #endif { *p_motion = tmp; } return min_mcost; } //! Check Second best predictor with EPZS pattern conditionEPZS = (checkMedian == TRUE) && ((currSlice->slice_type == P_SLICE) || (blocktype < 5)) && (min_mcost > stopCriterion) && (p_Inp->EPZSDual > 0); if (!conditionEPZS) break; //如果上方条件有多于0个不满足的,则退出循环 //退出条件1: EPZSDual = 0 ,即循环只需要执行一次 // 2: cost足够小了 // 3: blocktypc = 5,6,7 // 4: 不为P_SLICE // 5: checkMedian = false,即由于EPZSDual,而执行完了第二次 pointNumber = 0; patternStop = 0; motionDirection = 0; nextLast = 0; if ((tmp.mv_x == 0 && tmp.mv_y == 0) || (tmp.mv_x == mv->mv_x && tmp.mv_y == mv->mv_y)) { if (iabs (tmp.mv_x - mv->mv_x) < (mv_range) && iabs (tmp.mv_y - mv->mv_y) < (mv_range)) searchPatternF = p_Vid->sdiamond; else searchPatternF = p_Vid->square; } else searchPatternF = p_EPZS->searchPatternD; //! Second best. Note that following code is identical as for best predictor. //由于EPZSDual > 0,开启第二次循环,以原点(当前mv_block所在坐标)为中心,开始搜索 center = tmp2; checkMedian = FALSE; } } } if ((ref == 0) || (*prevSad > min_mcost)) *prevSad = min_mcost; #if EPZSREF if (p_Inp->EPZSSpatialMem) #else if (p_Inp->EPZSSpatialMem && ref == 0) #endif { *p_motion = tmp; //printf("value %d %d %d %d\n", p_motion->mv_x, p_motion->mv_y, p_motion[cur_list][ref][0][0][0].mv_x, p_motion[list + list_offset][ref][0][0][0].mv_y); //printf("xxxxx %d %d %d %d\n", p_motion->mv_x, p_motion->mv_y, p_motion[cur_list][ref][blocktype - 1][mv_block->block_y][pic_pix_x2].mv_x, p_motion[cur_list][ref][blocktype - 1][mv_block->block_y][pic_pix_x2].mv_y); } *mv = tmp; return min_mcost; }
标签:style blog http color io os ar for strong
原文地址:http://www.cnblogs.com/TaigaCon/p/3900394.html
