标签:splay link 速度 使用 div 计算 pac model 修改
前言:介绍活动关节,并使机器人活动起来。
参考自:http://wiki.ros.org/urdf/Tutorials/Building%20a%20Movable%20Robot%20Model%20with%20URDF

<?xml version="1.0"?> <robot name="visual"> <material name="blue"> <color rgba="0 0 0.8 1"/> </material> <material name="black"> <color rgba="0 0 0 1"/> </material> <material name="white"> <color rgba="1 1 1 1"/> </material> <link name="base_link"> <visual> <geometry> <cylinder length="0.6" radius="0.2"/> </geometry> <material name="blue"/> </visual> </link> <link name="right_leg"> <visual> <geometry> <box size="0.6 0.1 0.2"/> </geometry> <origin rpy="0 1.57075 0" xyz="0 0 -0.3"/> <material name="white"/> </visual> </link> <joint name="base_to_right_leg" type="fixed"> <parent link="base_link"/> <child link="right_leg"/> <origin xyz="0 -0.22 0.25"/> </joint> <link name="right_base"> <visual> <geometry> <box size="0.4 0.1 0.1"/> </geometry> <material name="white"/> </visual> </link> <joint name="right_base_joint" type="fixed"> <parent link="right_leg"/> <child link="right_base"/> <origin xyz="0 0 -0.6"/> </joint> <link name="right_front_wheel"> <visual> <origin rpy="1.57075 0 0" xyz="0 0 0"/> <geometry> <cylinder length="0.1" radius="0.035"/> </geometry> <material name="black"/> <origin rpy="0 0 0" xyz="0 0 0"/> </visual> </link> <joint name="right_front_wheel_joint" type="continuous"> <axis rpy="0 0 0" xyz="0 1 0"/> <parent link="right_base"/> <child link="right_front_wheel"/> <origin rpy="0 0 0" xyz="0.133333333333 0 -0.085"/> </joint> <link name="right_back_wheel"> <visual> <origin rpy="1.57075 0 0" xyz="0 0 0"/> <geometry> <cylinder length="0.1" radius="0.035"/> </geometry> <material name="black"/> </visual> </link> <joint name="right_back_wheel_joint" type="continuous"> <axis rpy="0 0 0" xyz="0 1 0"/> <parent link="right_base"/> <child link="right_back_wheel"/> <origin rpy="0 0 0" xyz="-0.133333333333 0 -0.085"/> </joint> <link name="left_leg"> <visual> <geometry> <box size="0.6 0.1 0.2"/> </geometry> <origin rpy="0 1.57075 0" xyz="0 0 -0.3"/> <material name="white"/> </visual> </link> <joint name="base_to_left_leg" type="fixed"> <parent link="base_link"/> <child link="left_leg"/> <origin xyz="0 0.22 0.25"/> </joint> <link name="left_base"> <visual> <geometry> <box size="0.4 0.1 0.1"/> </geometry> <material name="white"/> </visual> </link> <joint name="left_base_joint" type="fixed"> <parent link="left_leg"/> <child link="left_base"/> <origin xyz="0 0 -0.6"/> </joint> <link name="left_front_wheel"> <visual> <origin rpy="1.57075 0 0" xyz="0 0 0"/> <geometry> <cylinder length="0.1" radius="0.035"/> </geometry> <material name="black"/> </visual> </link> <joint name="left_front_wheel_joint" type="continuous"> <axis rpy="0 0 0" xyz="0 1 0"/> <parent link="left_base"/> <child link="left_front_wheel"/> <origin rpy="0 0 0" xyz="0.133333333333 0 -0.085"/> </joint> <link name="left_back_wheel"> <visual> <origin rpy="1.57075 0 0" xyz="0 0 0"/> <geometry> <cylinder length="0.1" radius="0.035"/> </geometry> <material name="black"/> </visual> </link> <joint name="left_back_wheel_joint" type="continuous"> <axis rpy="0 0 0" xyz="0 1 0"/> <parent link="left_base"/> <child link="left_back_wheel"/> <origin rpy="0 0 0" xyz="-0.133333333333 0 -0.085"/> </joint> <joint name="gripper_extension" type="prismatic"> <parent link="base_link"/> <child link="gripper_pole"/> <limit effort="1000.0" lower="-0.38" upper="0" velocity="0.5"/> <origin rpy="0 0 0" xyz="0.19 0 0.2"/> </joint> <link name="gripper_pole"> <visual> <geometry> <cylinder length="0.2" radius="0.01"/> </geometry> <origin rpy="0 1.57075 0 " xyz="0.1 0 0"/> </visual> </link> <joint name="left_gripper_joint" type="revolute"> <axis xyz="0 0 1"/> <limit effort="1000.0" lower="0.0" upper="0.548" velocity="0.5"/> <origin rpy="0 0 0" xyz="0.2 0.01 0"/> <parent link="gripper_pole"/> <child link="left_gripper"/> </joint> <link name="left_gripper"> <visual> <origin rpy="0.0 0 0" xyz="0 0 0"/> <geometry> <mesh filename="package://urdf_tutorial/meshes/l_finger.dae"/> </geometry> </visual> </link> <joint name="left_tip_joint" type="fixed"> <parent link="left_gripper"/> <child link="left_tip"/> </joint> <link name="left_tip"> <visual> <origin rpy="0.0 0 0" xyz="0.09137 0.00495 0"/> <geometry> <mesh filename="package://urdf_tutorial/meshes/l_finger_tip.dae"/> </geometry> </visual> </link> <joint name="right_gripper_joint" type="revolute"> <axis xyz="0 0 -1"/> <limit effort="1000.0" lower="0.0" upper="0.548" velocity="0.5"/> <origin rpy="0 0 0" xyz="0.2 -0.01 0"/> <parent link="gripper_pole"/> <child link="right_gripper"/> </joint> <link name="right_gripper"> <visual> <origin rpy="-3.1415 0 0" xyz="0 0 0"/> <geometry> <mesh filename="package://urdf_tutorial/meshes/l_finger.dae"/> </geometry> </visual> </link> <joint name="right_tip_joint" type="fixed"> <parent link="right_gripper"/> <child link="right_tip"/> </joint> <link name="right_tip"> <visual> <origin rpy="-3.1415 0 0" xyz="0.09137 0.00495 0"/> <geometry> <mesh filename="package://urdf_tutorial/meshes/l_finger_tip.dae"/> </geometry> </visual> </link> <link name="head"> <visual> <geometry> <sphere radius="0.2"/> </geometry> <material name="white"/> </visual> </link> <joint name="head_swivel" type="continuous"> <parent link="base_link"/> <child link="head"/> <axis xyz="0 0 1"/> <origin xyz="0 0 0.3"/> </joint> <link name="box"> <visual> <geometry> <box size="0.08 0.08 0.08"/> </geometry> <material name="blue"/> </visual> </link> <joint name="tobox" type="fixed"> <parent link="head"/> <child link="box"/> <origin xyz="0.1814 0 0.1414"/> </joint> </robot>
----------------------------------------------------------
代码解析:
<joint name="head_swivel" type="continuous">关节为连续型 <parent link="base_link"/> <child link="head"/> <axis xyz="0 0 1"/>限制只绕z轴旋转 <origin xyz="0 0 0.3"/> </joint> <joint name="left_gripper_joint" type="revolute">关节为旋转型 <axis xyz="0 0 1"/> <limit effort="1000.0" lower="0.0" upper="0.548" velocity="0.5"/>限定最大力度1000N,绕z周旋转弧度为0弧度-0.548弧度,最大速度为0.5m/s <origin rpy="0 0 0" xyz="0.2 0.01 0"/> <parent link="gripper_pole"/> <child link="left_gripper"/> </joint> <joint name="gripper_extension" type="prismatic">关节类型为棱柱型,只能沿着轴移动,不能沿着轴转动。 <parent link="base_link"/> <child link="gripper_pole"/> <limit effort="1000.0" lower="-0.38" upper="0" velocity="0.5"/> <origin rpy="0 0 0" xyz="0.19 0 0.2"/> </joint>
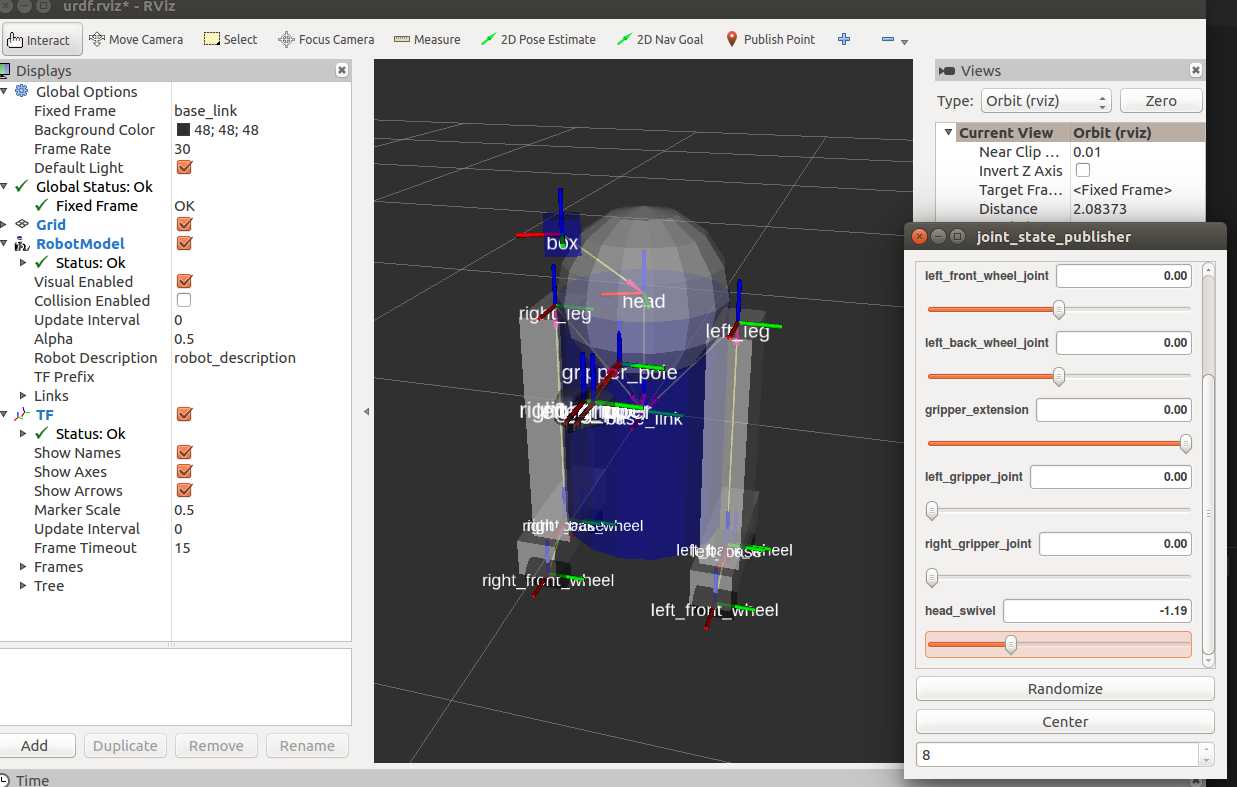
当您在GUI中移动滑块时,模型将在Rviz中移动。这是怎么做到的?首先,GUI解析URDF并找到所有非固定关节及其限制。然后,它使用滑块的值来发布sensor_msgs / JointState消息。然后robot_state_publisher使用它们来计算不同部分之间的所有变换。然后,生成的变换树用于显示Rviz中的所有形状。
-END-
标签:splay link 速度 使用 div 计算 pac model 修改
原文地址:https://www.cnblogs.com/chendeqiang/p/10335945.html
