标签:object 可能性 bsp core 机器学习 最小 通过 权重 vector
---恢复内容开始---
对于图像的分类
线性分类器的组成:1.评分函数:将原始图像数据到类别分值的映射。2.损失函数:用来量化预测分类标签的得分与真实标签之间一致性的。该方法可转化为一个最优化问题,在最优化过程中,将通过更新评分函数的参数来最小化损失函数值。
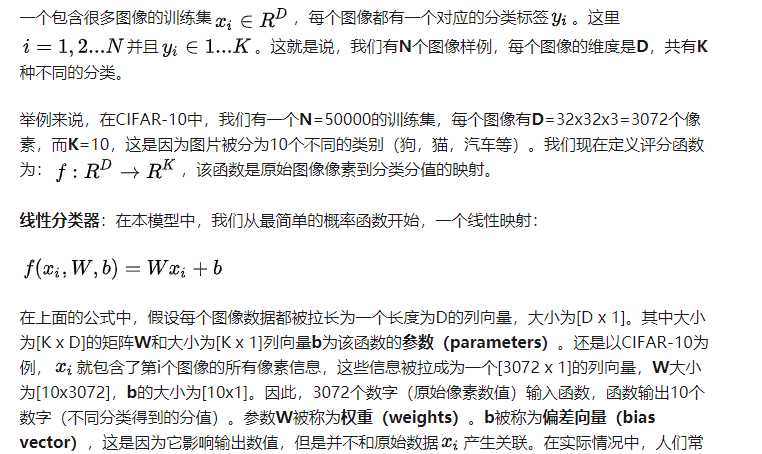
一. 从原始图像到标签类别分值的参数化映射
评分函数是将图像的像素值映射为各个分类类别的得分,得分高低代表图像属于该类别的可能性高低。例如:
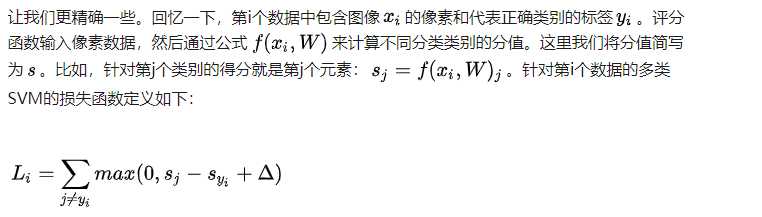
二.损失函数(loss function)
在评分函数中,该函数的参数是权重矩阵,因此在训练评分函数的过程中就是为了得到一个合适的权重矩阵。我们调整权重矩阵这个参数,使得评分函数的结果与训练数据集中图像的真实类别一致,即评分函数在正确的分类的位置应当得到最高的评分(score)。
那么,如何衡量评分函数的分类结果与图像真实位置的差异,------->损失函数
我们将使用损失函数(Loss Function)(有时也叫代价函数Cost Function或目标函数Objective)来衡量我们对结果的不满意程度。直观地讲,当评分函数输出结果与真实结果之间差异越大,损失函数输出越大,反之越小。
因此,线性分类器的训练过程就是,通过调整评分函数中的参数,即权重矩阵来使得损失函数达到最小。
损失函数的形式有多种,下面介绍常用的多类支持向量机(SVM)损失函数。
https://zhuanlan.zhihu.com/p/20945670?refer=intelligentunit
标签:object 可能性 bsp core 机器学习 最小 通过 权重 vector
原文地址:https://www.cnblogs.com/machine-learining/p/10346964.html