标签:部分 技术 联通 过程 去除 提取数据 add end 直线
同学用肉体一顿饭让我帮他做下这个DDL
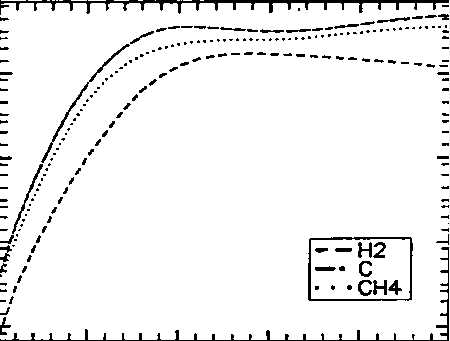
样图是一张非常扭曲的三虚线图他甚至想OCR识别x轴y轴坐标单位
- 上谷歌查了查,对于曲线图提取数据基本上是手动在曲线上取几个点,然后由这个几个点开始遍历领域点,判断领域点是否是黑色,然后再遍历这个黑色点的领域,最终找出一条最长的线便是曲线,一种类似曲线拟合的做法?
- 知乎专栏提供了一种思路,先把曲线图上无关信息去掉,然后提取最大的连通区域,就是所需要的实线,只可惜样例图要做的是虚线。
第一种方法是同学AA想要的,不过英国人嘛,只告诉他要这样做,并没有告诉他基本思想,所以我们基于第二种方法拓展尝试一下。
清洗图像
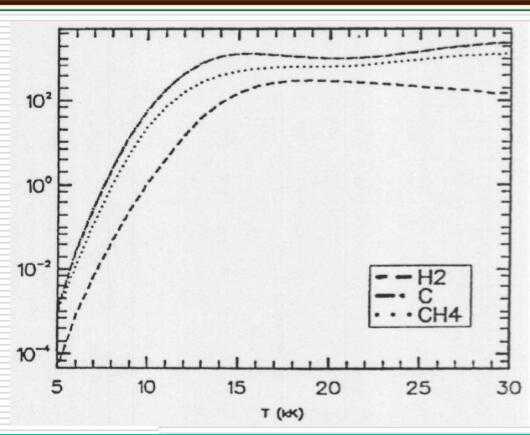
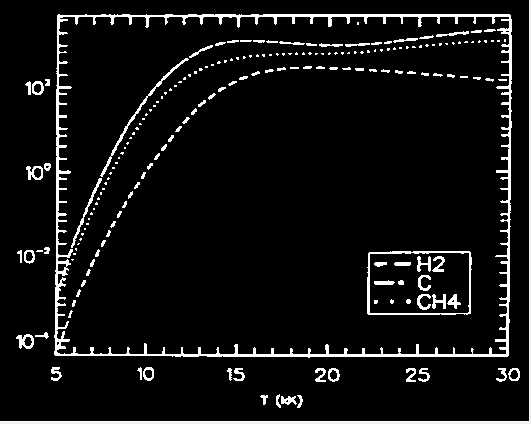
所给的图像是RGB图像,且有噪声点,先将图像灰度化,计算图像阈值,通过阈值将图像二值化。
提取真实区域
想要的真实区域就是下图中使用红框标出的区域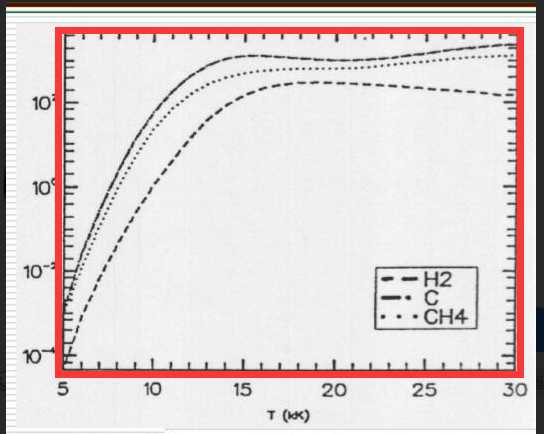
法1
一开始的想法是先在图片的(end*0.8:end-10,)区域中霍夫变换识别出下边框,然后取下边框的(,1:10)部分识别左边框,取左边框的最上端坐标和下边框的最右端坐标,作为分割图像的基准,真实区域就分割出来了。
- 提取下边框很顺利
- 提取左边框不是很顺利
- 提取右边框也不是很顺利
- 提取上边框很顺利
虽然和计划的有所偏差,但通过上边框的最左端坐标和下边框的最右段坐标,作为分割图像的基准,得到的真实图像理论上是相同的。
法2
对于样例图,真实区域是封闭的,是图中的最大连通区域,那找最大联通区域也可以提取出样例图的真实区域。
再取得该区域最左上端白点坐标和最右下端白点坐标,作为分割图像的基准,得到真实图像。
真实图像如图所示
再次清洗图像
为了方便起见,下文中“图”、“图像”指的是上一步中得到的真实图像,而不是原始图像。
对于得到的图像,仍然存在边框、刻度线、右下角标识区域等无关信息。
- 边框可以直接通过上一步法1中得到的边框坐标数组去掉。
- 刻度线以左边框的刻度线为例,遍历图像(,1:5)范围内,若该点是黑点,则从该点开始,向右寻找最大的直线区域,去除。
样例图中存在曲线与刻度线相交的情况,我采用的方法是对于该点,如果24领域中的黑点总数大于一个阈值,则认为该点是曲线上的点,保留。
- 右下角标识区域直接找取联通区域,如果该连通区域的大小大于阈值,认为是标识区域,去除。
得到的结果图像,边界存在问题,有待改进:
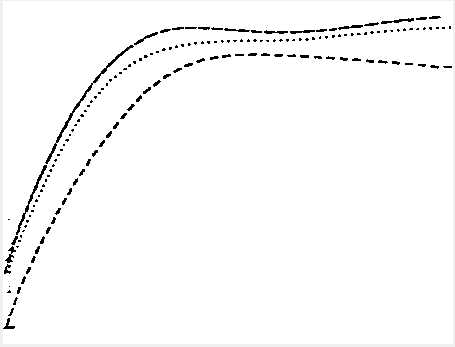
分离曲线
三条曲线都不是实线,没法通过找最大联通区域的方法逐个分离,但因为不同曲线中实线部分的长度是不一样的,所以可以贪心一下,从第1列开始,以某个阈值add_len为步长,找最大连通区域,再进行拼接,以图中最上面一条曲线为例:
- 首先取图像(:,1:10)区域中的最大联通区域,或者取3个联通区域,认为联通区域在列上的坐标极小值为其高度值,高度值越小则越高,最高者则为想要取得最上面一条曲线。
- 然后取得该联通区域中最右端的点n1(x,y),再取(:,y+1:y+add_len)中的n个联通区域,对于每个联通区域,找出其最左端的点n2(x1,y1),求n1与n2之间的欧式距离,认为欧式距离最短的就是该曲线在(:,y+1:y+add_len)的部分,然后重复该步,直到y值无限接近于图像最右端。
- 对于上一步也有不同的做法,取得该联通区域中最右端的点n1(x,y),在从i=1开始循环,取(:,y+1:y+add_len)中的i个最大联通区域,对于第i个区域,他的面积总是第i大的,找出其最左端的点n2(x1,y1),求n1与n2之间的欧式距离,若欧式距离小于某个阈值,则认为该联通区域是该曲线在(:,y+1:y+add_len)的部分,然后重复该步,直到y值无限接近于图像最右端。
过程如图:
两种做法进行比较,得出的曲线基本相同。
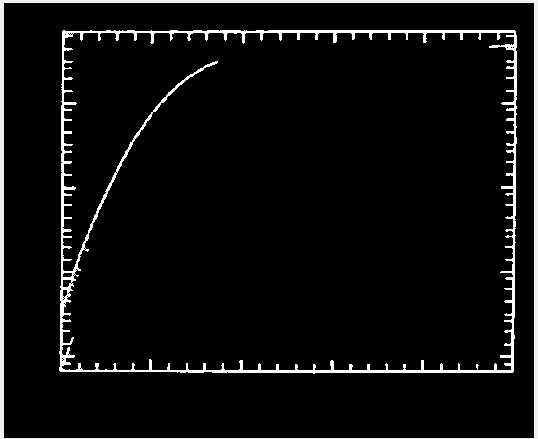
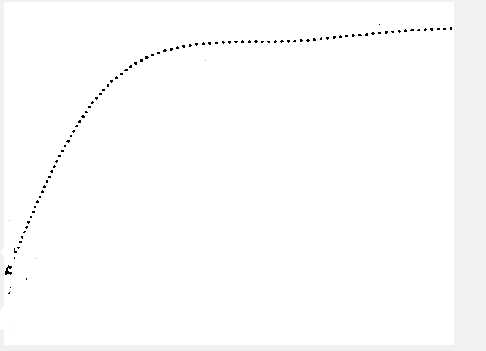
取得最上端曲线a如图所示:
然后将该曲线在图中去除,再重复之前的做法,取得第二条曲线b。对于第二条曲线,add_len需要改小,欧式距离的阈值需要改大。
将第二条曲线去除,得到第三条曲线c
可以看出第三条曲线的图像存在噪点,可以用一个区域对噪点清洗,得到第三条曲线c
导出数据
将a,b,c的坐标值与图像的size相除,再乘上单位,即可得到数据。
matlab从曲线图提取数据
标签:部分 技术 联通 过程 去除 提取数据 add end 直线
原文地址:https://www.cnblogs.com/shy-/p/10369076.html