标签:基础 箭头 节点 旋转 计算 角度 有一个 叠加 image
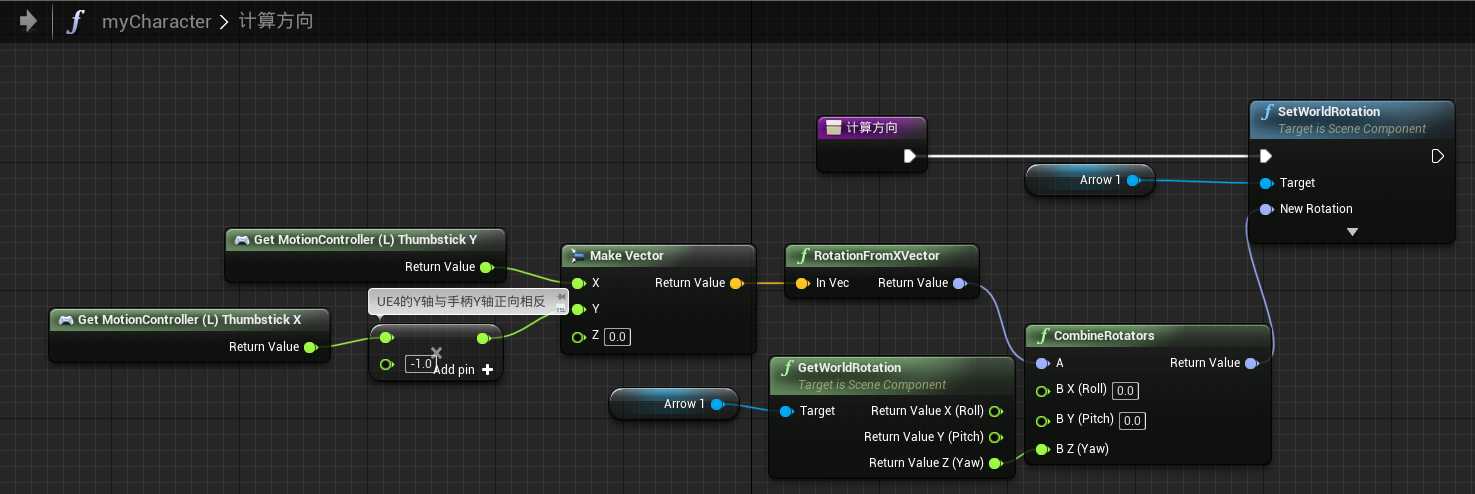
一、手柄在世界坐标系中有一个绝对朝向,我们可以知道箭头相对于手柄的朝向,相对于手柄的旋转角度。
可以通过手柄绝对朝向、箭头的相对于手柄的朝向计算得到箭头的绝对朝向。
在得到箭头的相对于手柄的角度,在这个角度的基础上,再旋转一个手柄在世界坐标系中的绝对角度,就可以得到箭头在世界坐标系中的绝对角度。
两个旋转角度叠加,可以使用UE4引擎提供的Combinrotators函数。

Delta(Rotator):一个对象的朝向本来是A,然后给定B朝向,让这个对象朝着B朝向相反的方向旋转,旋转的角度跟B的角度一样,只不过是跟B角度方向相反。

Delta(Rotator)相当于角度减法,Combinrotators相当于角度加法。
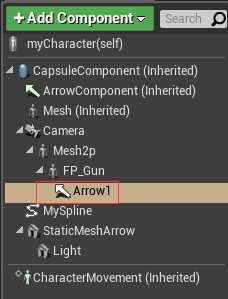
注意:如果使用世界坐标系设置箭头旋转(SetWorldRotation),那么箭头可以在任何一个层级结构,不一定需要在FP_Gun节点下面,也可以在根节点下面。
[UE4]让箭头保持水平的第二种方法:Combinrotators、Delta(Rotator)
标签:基础 箭头 节点 旋转 计算 角度 有一个 叠加 image
原文地址:https://www.cnblogs.com/timy/p/10428481.html