标签:搜索 style png 结构 常用 str 根据 log 控制器
一.电路原理
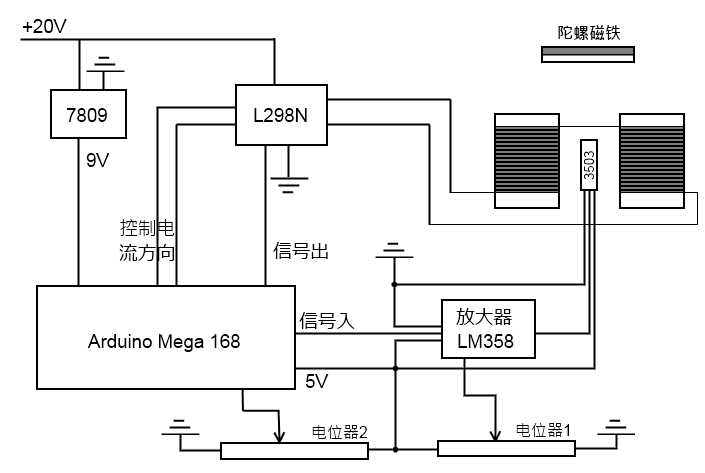
就是用Arduino控制4个线圈,根据从霍尔传感器传来的探测到浮子的磁信号,来调整线圈里的电流大小和方向,从而把浮子控制在中心位置。
二.实现方法
结构:用一个大磁铁,或一圈小磁铁来提供是浮子漂浮起来的磁力四个线圈放在磁铁的中间。在四个磁铁的中心,放两个线性霍尔传感器。?
1. 磁铁
浮子,直径30mm,厚度5mm的强力磁铁。

2、线圈?
线圈参数:
直径0.27mm的漆包线,线圈骨架(线圈高度:12mm,线圈直径:19mm, 线圈线径:0.33MM )。最后,线圈电阻在23欧姆左右。
连接方法: 4个线圈,需要把对面的两个串联起来。串联时,两个线圈的电流要方向相反。一个逆时 针,另一个就是顺时针。这样保证,一个在推浮子的时候,另个一个在拉。
3、L298N控制器
因为线圈需要的电流较大,Arduino不可能提供足够的电流。所以需要用外接的电源。一般15-20V,2A的电源就够。
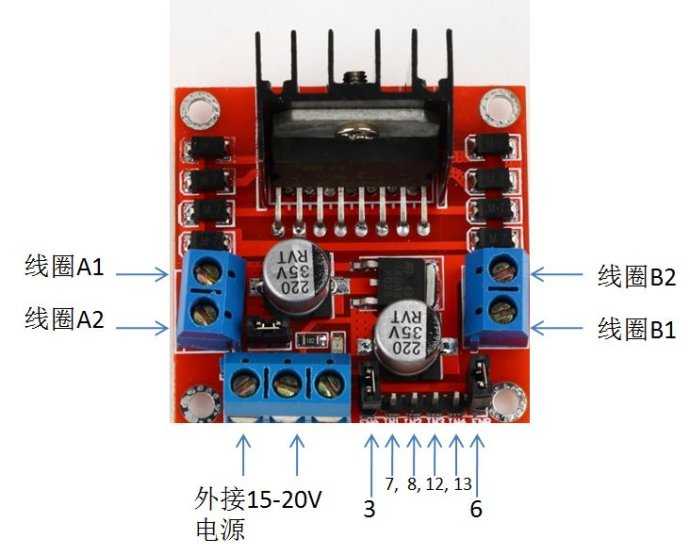
因为要对线圈的电流进行控制,所以必须要用控制线路。L298N是常用的控制线圈电流或电机的板子。如图,第一对线圈A1和A2串联后,接到左边两个接口。?B1和B2接到右边两个接口。外接电源接到下面的左边两个接口(左+,中间那个是地)。下面右边的几个接线是接Arduino的控制输出的,数字代表Arduino的管脚。3是控制A线圈的电流大小的。6是控制B线圈的电流大小的。7和8是控制A线圈电流方向的。12和13是控制B线圈电流方向的。
3和6是?Arduino模拟(PMW)输出口(PWM是“Pulse-width modulation”,也有些人把它翻译成“脉冲宽度调制”,具体解释可以搜索一下)。这两个口用来输出一个电压来控制线圈的磁力大小。7、8和12、13是用来控制线圈的电流方向,比如7输出1,8输出0,电流是正向;7输出0,8输出1,电流是反向。
参考文献:http://blog.sina.com.cn/s/blog_548527e00102wz1t.html
标签:搜索 style png 结构 常用 str 根据 log 控制器
原文地址:https://www.cnblogs.com/sczcxf/p/10453582.html