标签:存储 数据 capture rgb tail size get 实现 tab
前面简单分析了内核中虚拟摄像头驱动 vivi 的框架与实现,本文参考 vivi 来写一个虚拟摄像头驱动,查询、设置视频格式相对简单,难点在于 vb2_buf 的处理过程。
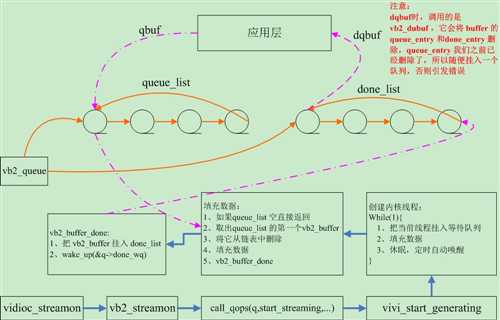
在我的程序中,大概的数据采集流程如上图所示,启动视频采集之后,创建了一个内核线程,内核线程每30ms 唤醒一次,每一次唤醒都会尝试用 queue_list 中取出一个 buffer 填充数据之后挂入 done_list ,挂入 done_list 之后就会唤醒应用程序(poll 中休眠),应用程序唤醒之后就会 dqbuf 获取数据,处理完数据再 qbuf 把 buffer 挂入 queue_list 的头部,一直循环。
#include <linux/module.h> #include <linux/errno.h> #include <linux/kernel.h> #include <linux/init.h> #include <linux/sched.h> #include <linux/slab.h> #include <linux/font.h> #include <linux/mutex.h> #include <linux/videodev2.h> #include <linux/kthread.h> #include <linux/freezer.h> #include <media/videobuf2-vmalloc.h> #include <media/v4l2-device.h> #include <media/v4l2-ioctl.h> #include <media/v4l2-ctrls.h> #include <media/v4l2-fh.h> #include <media/v4l2-event.h> #include <media/v4l2-common.h> #define VFL_TYPE_GRABBER 0 #define MAX_WIDTH 1920 #define MAX_HEIGHT 1200 static unsigned int vid_limit = 16; static struct video_device *video_dev; // video_device 结构,用来描述一个 video 设备 static struct vb2_queue vivi_queue; // vivi_queue 用来存放缓冲区信息,缓冲区链表等 struct task_struct *kthread; // 内核线程,用来向缓冲区中填充数据 DECLARE_WAIT_QUEUE_HEAD(wait_queue_head); // 等待队列头 struct list_head my_list; // 链表头 // 用来存放应用程序设置的视频格式 static struct mformat { __u32 width; __u32 height; __u32 pixelsize; __u32 field; __u32 fourcc; __u32 depth; }mformat; static void mvideo_device_release(struct video_device *vdev) { } static long mvideo_ioctl(struct file *file, unsigned int cmd, void *arg) { int ret = 0; struct v4l2_fh *fh = NULL; switch (cmd) { case VIDIOC_QUERYCAP: { struct v4l2_capability *cap = (struct v4l2_capability *)arg; cap->version = LINUX_VERSION_CODE; ret = video_dev->ioctl_ops->vidioc_querycap(file, NULL, cap); break; } case VIDIOC_ENUM_FMT: { struct v4l2_fmtdesc *f = arg; if (f->type == V4L2_BUF_TYPE_VIDEO_CAPTURE) { ret = video_dev->ioctl_ops->vidioc_enum_fmt_vid_cap(file, fh, f); }else{ printk("V4L2_BUF_TYPE_VIDEO_CAPTURE error\n"); } break; } case VIDIOC_G_FMT: { struct v4l2_format *f = (struct v4l2_format *)arg; if (f->type == V4L2_BUF_TYPE_VIDEO_CAPTURE) { ret = video_dev->ioctl_ops->vidioc_g_fmt_vid_cap(file, fh, f); }else{ printk("V4L2_BUF_TYPE_VIDEO_CAPTURE error\n"); } break; } case VIDIOC_TRY_FMT: { struct v4l2_format *f = (struct v4l2_format *)arg; if (f->type == V4L2_BUF_TYPE_VIDEO_CAPTURE) { ret = video_dev->ioctl_ops->vidioc_try_fmt_vid_cap(file, fh, f); }else{ printk("V4L2_BUF_TYPE_VIDEO_CAPTURE error\n"); } break; } case VIDIOC_S_FMT: { struct v4l2_format *f = (struct v4l2_format *)arg; if (f->type == V4L2_BUF_TYPE_VIDEO_CAPTURE) { video_dev->ioctl_ops->vidioc_s_fmt_vid_cap(file, fh, f); }else{ printk("V4L2_BUF_TYPE_VIDEO_CAPTURE error\n"); } break; } case VIDIOC_REQBUFS: { struct v4l2_requestbuffers *p = arg; ret = video_dev->ioctl_ops->vidioc_reqbufs(file, fh, p); break; } case VIDIOC_QUERYBUF: { struct v4l2_buffer *p = arg; ret = video_dev->ioctl_ops->vidioc_querybuf(file, fh, p); break; } case VIDIOC_QBUF: { struct v4l2_buffer *p = arg; ret = video_dev->ioctl_ops->vidioc_qbuf(file, fh, p); break; } case VIDIOC_DQBUF: { struct v4l2_buffer *p = arg; ret = video_dev->ioctl_ops->vidioc_dqbuf(file, fh, p); break; } case VIDIOC_STREAMON: { enum v4l2_buf_type i = *(int *)arg; ret = video_dev->ioctl_ops->vidioc_streamon(file, fh, i); break; } case VIDIOC_STREAMOFF: { enum v4l2_buf_type i = *(int *)arg; ret = video_dev->ioctl_ops->vidioc_streamoff(file, fh, i); break; } } return ret; } static int vivi_mmap(struct file *file, struct vm_area_struct *vma) { int ret; printk("enter mmap\n"); ret = vb2_mmap(&vivi_queue, vma); if(ret == 0){ printk("mmap ok\n"); }else{ printk("mmap error\n"); } return ret; } // 查询设备能力 static int mvidioc_querycap(struct file *file, void *priv, struct v4l2_capability *cap) { strcpy(cap->driver, "vivi"); strcpy(cap->card, "vivi"); strcpy(cap->bus_info, "mvivi"); cap->device_caps = V4L2_CAP_VIDEO_CAPTURE; cap->capabilities = cap->device_caps | V4L2_CAP_DEVICE_CAPS | V4L2_CAP_STREAMING; printk("mvidioc_querycap \n"); return 0; } // 枚举视频支持的格式 static int vidioc_enum_fmt_vid_cap(struct file *file, void *priv, struct v4l2_fmtdesc *f) { printk("vidioc_enum_fmt_vid_cap \n"); if (f->index >= 1) return -EINVAL; strcpy(f->description, "mvivi"); f->pixelformat = mformat.fourcc; printk("vidioc_enum_fmt_vid_cap \n"); return 0; } // 修正应用层传入的视频格式 static int vidioc_try_fmt_vid_cap(struct file *file, void *priv, struct v4l2_format *f) { printk("vidioc_try_fmt_vid_cap\n"); if (f->fmt.pix.pixelformat != V4L2_PIX_FMT_YUYV) { return -EINVAL; } f->fmt.pix.field = V4L2_FIELD_INTERLACED; v4l_bound_align_image(&f->fmt.pix.width, 48, MAX_WIDTH, 2, &f->fmt.pix.height, 32, MAX_HEIGHT, 0, 0); f->fmt.pix.bytesperline = (f->fmt.pix.width * mformat.depth) / 8; f->fmt.pix.sizeimage = f->fmt.pix.height * f->fmt.pix.bytesperline; if (mformat.fourcc == V4L2_PIX_FMT_YUYV) f->fmt.pix.colorspace = V4L2_COLORSPACE_SMPTE170M; else f->fmt.pix.colorspace = V4L2_COLORSPACE_SRGB; return 0; } // 获取支持的格式 static int vidioc_g_fmt_vid_cap(struct file *file, void *priv, struct v4l2_format *f) { // 将参数写回用户空间 f->fmt.pix.width = mformat.width; f->fmt.pix.height = mformat.height; f->fmt.pix.field = mformat.field; f->fmt.pix.pixelformat = mformat.fourcc; f->fmt.pix.bytesperline = (f->fmt.pix.width * mformat.depth) / 8; f->fmt.pix.sizeimage = f->fmt.pix.height * f->fmt.pix.bytesperline; if (mformat.fourcc == V4L2_PIX_FMT_YUYV) f->fmt.pix.colorspace = V4L2_COLORSPACE_SMPTE170M; else f->fmt.pix.colorspace = V4L2_COLORSPACE_SRGB; printk("vidioc_g_fmt_vid_cap \n"); return 0; } // 设置视频格式 static int vidioc_s_fmt_vid_cap(struct file *file, void *priv, struct v4l2_format *f) { int ret = vidioc_try_fmt_vid_cap(file, priv, f); if (ret < 0) return ret; // 存储用户空间传入的参数设置 mformat.fourcc = V4L2_PIX_FMT_YUYV; mformat.pixelsize = mformat.depth / 8; mformat.width = f->fmt.pix.width; mformat.height = f->fmt.pix.height; mformat.field = f->fmt.pix.field; printk("vidioc_s_fmt_vid_capp \n"); return 0; } // vb2 核心层 vb2_reqbufs 中调用它,确定申请缓冲区的大小 static int queue_setup(struct vb2_queue *vq, const struct v4l2_format *fmt, unsigned int *nbuffers, unsigned int *nplanes, unsigned int sizes[], void *alloc_ctxs[]) { unsigned long size; printk("mformat.width %d \n",mformat.width); printk("mformat.height %d \n",mformat.height); printk("mformat.pixelsize %d \n",mformat.pixelsize); size = mformat.width * mformat.height * mformat.pixelsize; if (0 == *nbuffers) *nbuffers = 32; while (size * *nbuffers > vid_limit * 1024 * 1024) (*nbuffers)--; *nplanes = 1; sizes[0] = size; return 0; } static int buffer_init(struct vb2_buffer *vb) { return 0; } static int buffer_finish(struct vb2_buffer *vb) { return 0; } static int buffer_prepare(struct vb2_buffer *vb) { unsigned long size; size = mformat.width * mformat.height * mformat.pixelsize; vb2_plane_size(vb, 0); //vb2_set_plane_payload(&buf->vb, 0, size); return 0; } static void buffer_queue(struct vb2_buffer *vb) { } // 内核线程中填充数据,效果是一个逐渐放大的圆形,视频大小为 640 * 480 static void vivi_fillbuff(struct vb2_buffer *vb) { void *vbuf = NULL; unsigned char (*p)[mformat.width][mformat.pixelsize]; unsigned int i,j; vbuf = vb2_plane_vaddr(vb, 0); static unsigned int t = 0; p = vbuf; for(j = 0; j < mformat.height; j++) for(i = 0; i < mformat.width; i++){ if((j - 240)*(j - 240) + (i - 320)*(i - 320) < (t * t)){ *(*(*(p+j)+i)+0) = (unsigned char)0xff; *(*(*(p+j)+i)+1) = (unsigned char)0xff; }else{ *(*(*(p+j)+i)+0) = (unsigned char)0; *(*(*(p+j)+i)+1) = (unsigned char)0; } } t++; printk("%d\n",t); if( t >= mformat.height/2) t = 0; } // 内核线程每一次唤醒调用它 static void vivi_thread_tick(void) { struct vb2_buffer *buf = NULL; struct list_head *list; struct vb2_buffer *task; unsigned long flags; if (list_empty(&vivi_queue.queued_list)) { //printk("No active queue to serve\n"); return; } // 注意我们这里取出之后就删除了,剩的重复工作,但是在 dqbuf 时,vb2_dqbuf 还会删除一次,我做的处理是在dqbuf之前将buf随便挂入一个链表 buf = list_entry(vivi_queue.queued_list.next, struct vb2_buffer, queued_entry); list_del(&buf->queued_entry); /* 填充数据 */ vivi_fillbuff(buf); printk("filled buffer %p\n", buf->planes[0].mem_priv); // 它干两个工作,把buffer 挂入done_list 另一个唤醒应用层序,让它dqbuf vb2_buffer_done(buf, VB2_BUF_STATE_DONE); } #define WAKE_NUMERATOR 30 #define WAKE_DENOMINATOR 1001 #define BUFFER_TIMEOUT msecs_to_jiffies(500) /* 0.5 seconds */ #define frames_to_ms(frames) \ ((frames * WAKE_NUMERATOR * 1000) / WAKE_DENOMINATOR) static void vivi_sleep(void) { int timeout; DECLARE_WAITQUEUE(wait, current); add_wait_queue(&wait_queue_head, &wait); if (kthread_should_stop()) goto stop_task; /* Calculate time to wake up */ timeout = msecs_to_jiffies(frames_to_ms(1)); vivi_thread_tick(); schedule_timeout_interruptible(timeout); stop_task: remove_wait_queue(&wait_queue_head, &wait); try_to_freeze(); } static int vivi_thread(void *data) { set_freezable(); for (;;) { vivi_sleep(); if (kthread_should_stop()) break; } printk("thread: exit\n"); return 0; } static int vivi_start_generating(void) { kthread = kthread_run(vivi_thread, video_dev, video_dev->name); if (IS_ERR(kthread)) { printk("kthread_run error\n"); return PTR_ERR(kthread); } /* Wakes thread */ wake_up_interruptible(&wait_queue_head); return 0; } static int start_streaming(struct vb2_queue *vq, unsigned int count) { vivi_start_generating(); return 0; } static int stop_streaming(struct vb2_queue *vq) { if (kthread) { kthread_stop(kthread); kthread = NULL; } /* while (!list_empty(&vivi_queue.queued_list)) { struct vb2_buffer *buf; buf = list_entry(vivi_queue.queued_list.next, struct vb2_buffer, queued_entry); list_del(&buf->queued_entry); vb2_buffer_done(buf, VB2_BUF_STATE_ERROR); } */ return 0; } static struct vb2_ops vivi_video_qops = { .queue_setup = queue_setup, .buf_init = buffer_init, .buf_finish = buffer_finish, .buf_prepare = buffer_prepare, .buf_queue = buffer_queue, .start_streaming = start_streaming, .stop_streaming = stop_streaming, }; static int mvivi_open(struct file *filp) { vivi_queue.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; vivi_queue.io_modes = VB2_MMAP; vivi_queue.drv_priv = video_dev; //vivi_queue.buf_struct_size = sizeof(struct vivi_buffer); vivi_queue.ops = &vivi_video_qops; vivi_queue.mem_ops = &vb2_vmalloc_memops; vivi_queue.name = "vb2"; vivi_queue.buf_struct_size = sizeof(struct vb2_buffer); INIT_LIST_HEAD(&vivi_queue.queued_list); INIT_LIST_HEAD(&vivi_queue.done_list); spin_lock_init(&vivi_queue.done_lock); init_waitqueue_head(&vivi_queue.done_wq); mformat.fourcc = V4L2_PIX_FMT_YUYV; mformat.depth = 16; INIT_LIST_HEAD(&my_list); return 0; } static int vidioc_reqbufs(struct file *file, void *priv, struct v4l2_requestbuffers *p) { printk("vidioc_reqbufs \n"); printk("count %d\n",p->count); printk("memory %d\n",p->memory); return vb2_reqbufs(&vivi_queue, p); } static int vidioc_querybuf(struct file *file, void *priv, struct v4l2_buffer *p) { printk("vidioc_querybuf \n"); return vb2_querybuf(&vivi_queue, p); } static int vidioc_qbuf(struct file *file, void *priv, struct v4l2_buffer *p) { printk("vidioc_qbuf buffer \n"); return vb2_qbuf(&vivi_queue, p); } static int vidioc_dqbuf(struct file *file, void *priv, struct v4l2_buffer *p) { printk("vidioc_dqbuf buffer \n"); struct vb2_buffer *vb; vb = list_first_entry(&vivi_queue.done_list, struct vb2_buffer, done_entry); list_add_tail(&vb->queued_entry, &my_list); return vb2_dqbuf(&vivi_queue, p, file->f_flags & O_NONBLOCK); } static int vidioc_streamon(struct file *file, void *priv, enum v4l2_buf_type i) { printk("vidioc_streamon \n"); return vb2_streamon(&vivi_queue, i); } static int vidioc_streamoff(struct file *file, void *priv, enum v4l2_buf_type i) { printk("vidioc_streamoff \n"); return vb2_streamoff(&vivi_queue, i); } static struct v4l2_ioctl_ops mvivi_ioctl_ops = { .vidioc_querycap = mvidioc_querycap, .vidioc_enum_fmt_vid_cap = vidioc_enum_fmt_vid_cap, .vidioc_g_fmt_vid_cap = vidioc_g_fmt_vid_cap, .vidioc_try_fmt_vid_cap = vidioc_try_fmt_vid_cap, .vidioc_s_fmt_vid_cap = vidioc_s_fmt_vid_cap, .vidioc_reqbufs = vidioc_reqbufs, .vidioc_querybuf = vidioc_querybuf, .vidioc_qbuf = vidioc_qbuf, .vidioc_dqbuf = vidioc_dqbuf, .vidioc_streamon = vidioc_streamon, .vidioc_streamoff = vidioc_streamoff, }; static unsigned int mvivi_poll(struct file *file, struct poll_table_struct *wait) { struct vb2_buffer *vb = NULL; int res = 0; printk("enter the poll \n"); poll_wait(file, &vivi_queue.done_wq, wait); if (!list_empty(&vivi_queue.done_list)) vb = list_first_entry(&vivi_queue.done_list, struct vb2_buffer, done_entry); if (vb && (vb->state == VB2_BUF_STATE_DONE || vb->state == VB2_BUF_STATE_ERROR)) { return (V4L2_TYPE_IS_OUTPUT(vivi_queue.type)) ? res | POLLOUT | POLLWRNORM : res | POLLIN | POLLRDNORM; } return 0; } long video_ioctl2(struct file *file, unsigned int cmd, unsigned long arg) { return video_usercopy(file, cmd, arg, mvideo_ioctl); } static struct v4l2_file_operations mvivi_fops = { .owner = THIS_MODULE, .open = mvivi_open, .unlocked_ioctl = video_ioctl2, //.release = mvivi_close, .poll = mvivi_poll, .mmap = vivi_mmap, }; static struct video_device vivi_template = { .name = "mvivi", .fops = &mvivi_fops, .ioctl_ops = &mvivi_ioctl_ops, .release = mvideo_device_release, }; static int mvivi_init(void) { int ret; video_dev = video_device_alloc(); *video_dev = vivi_template; ret = video_register_device(video_dev, VFL_TYPE_GRABBER, -1); if(ret != 0){ printk(" video_register_device error\n"); }else{ printk(" video_register_device ok\n"); } return ret; } static void mvivi_exit(void) { video_unregister_device(video_dev); } module_init(mvivi_init); module_exit(mvivi_exit); MODULE_LICENSE("GPL");
标签:存储 数据 capture rgb tail size get 实现 tab
原文地址:https://www.cnblogs.com/Lxk0825/p/10400509.html