标签:代码 system user 注意 clock 旋转 configure 完成 功能
1.TB6612FNG电机驱动模块
(1)<概述>
TB6612FNG是东芝半导体公司生产的一款直流电机驱动器件,它具有大电流MOSFET-H桥结构,双通道电路输出,可同时驱动两个电机。
与L298N使用基本一致。而且,相比于L298N的热耗性和外围二极管续流电路,其无需外加散热片,外围电路简单,只需接电源滤波电容就可
以直接驱动电机,利于减小系统尺寸。对于PWM信号输入频率范围,高达100kHz的频率更是可以满足我们的大部分需求。
(2)<主要参数>
| 最大输入电压 | VM=15V |
| 最大输出电流 | Iout=1.2A(平均) |
| 模式 | 正反转/短路刹车/停机功能 |
| 内置电路 |
过热保护,低压检测 |
(3)<模块接线图>
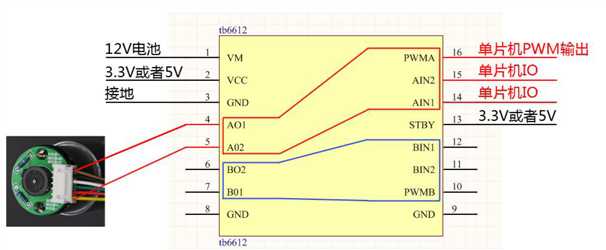 (对应口可以在模块背面看到)
(对应口可以在模块背面看到)
解读:VM直接接电池即可,VCC是内部逻辑供电,一般给3.3V或者5V都可以,模块的三个GND接任意一个即可,因为都是导通的,STBY置高模块才能正常 工作。
完成上面的工作之后,我们就可以开始搭载硬件电路了。
2. LM2596S DC-DC降压电源模块
(1)<产品参数>
| 输入电压 | 3.2V~46V |
| 输出电压 | 1.25V~35V |
| 输出电流 | 3A以内 |
| 转换效率 | 92%以内 |
| 输出文波 | <30mV |
| 开关频率 | 65kHz |
| 工作温度 | -45℃~+85℃ |
| 尺寸大小 |
43.2mm*21.0mm*14.0mm (长*宽*高) |
笔者用12V电源供电,那接到单片机及电机驱动模块内部驱动口必须经过降压到3.3~5V才可以给正常供电。
话不多说,上图:

(2)<具体使用>
——可以看到模块的正面有一个蓝色的长方体,顶部有一个旋钮,可能比较难操作,我们用一字形螺丝刀(细一点的)来旋转上面的旋钮即可调节输出电压。注意降压模块的四角,我们可以看到 IN- IN+ OUT- OUT+ 的字样。IN则为输入电压所接脚,OUT则为输出电压所接脚,外部电源就是通过这个模块于内部电路形成联系。
——指示灯亮,模块正常工作。
——IN+/-接外部电源,用万用表测量输出OUT+/-的电压值达到所需要电压为止
——长时间工作建议在2.5A以内的电流使用,同时加上散热片(10W以上输出);由于是降压模块,为了保证输出稳定,请保持最小1.5V压差
3.直流减速电机
按照惯例还是先上图介绍

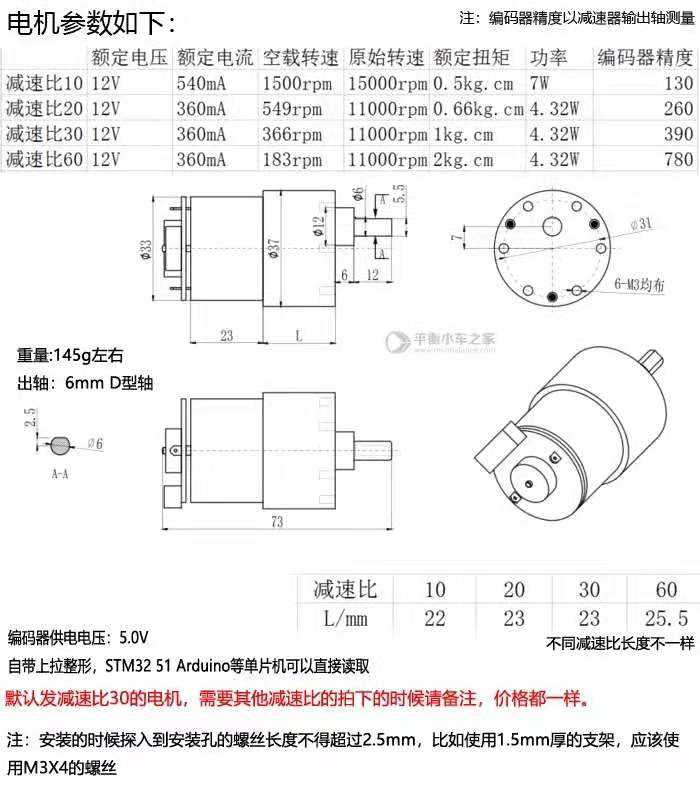 (电机参数 ——> 购自平衡小车之家)
(电机参数 ——> 购自平衡小车之家)

所以这次单纯控制电机,我们只需单纯引出两条线接到驱动模块上
——电路必须依靠软件的控制前提,所以我们从软件入手
1.打开cube,输入STM32F103C8,点进去进行如图配置(PWM频率选取10kHz)
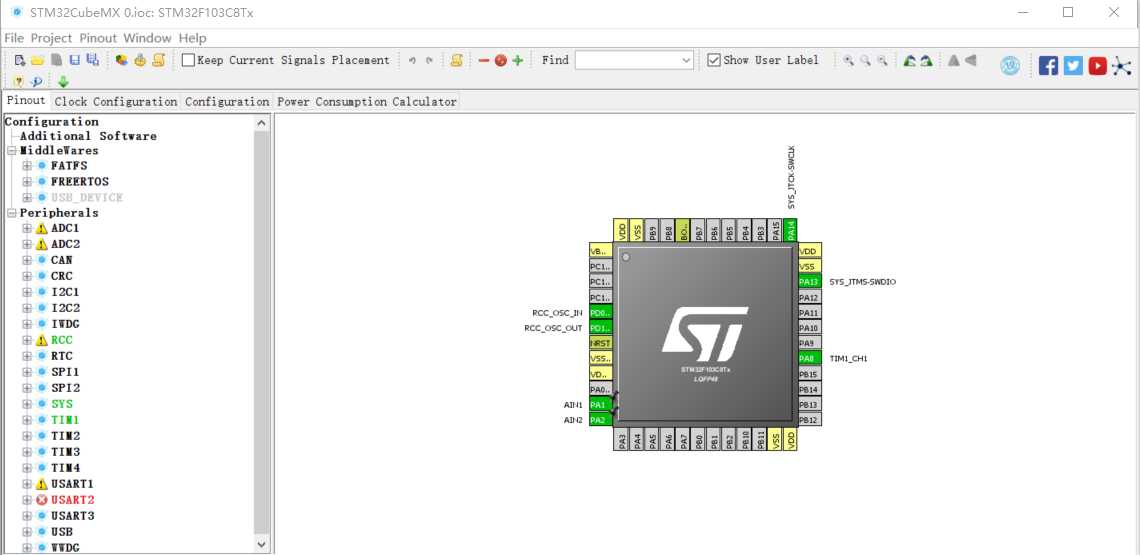 (PA1/PA2为Output模式)
(PA1/PA2为Output模式)
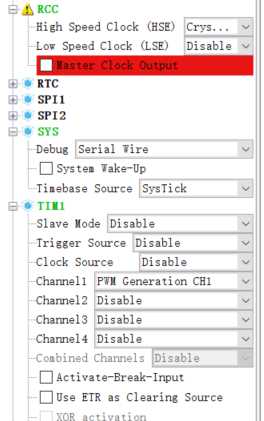 (打开TIM1通道一,设为PWM输出模式)
(打开TIM1通道一,设为PWM输出模式)
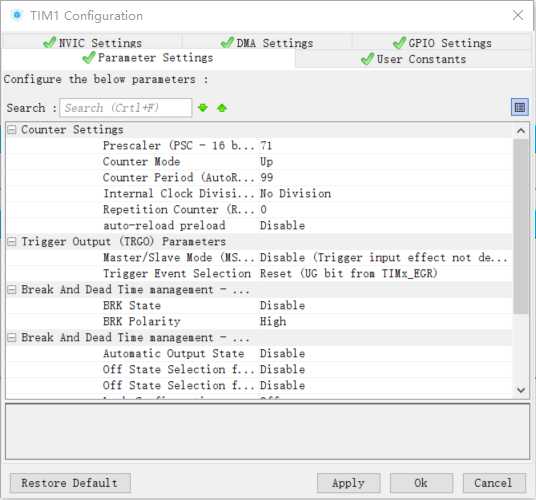 (注意77和99)(用这个来确定PWM频率)
(注意77和99)(用这个来确定PWM频率)
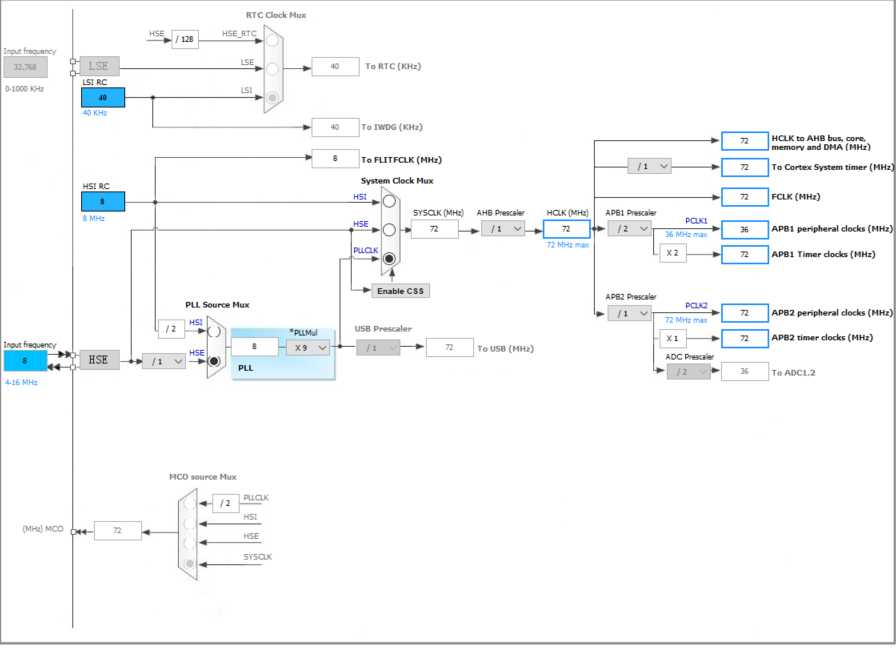 (时钟树设定,查表看到TIM1挂载于APB1 timer clocks)
(时钟树设定,查表看到TIM1挂载于APB1 timer clocks)
到这,我们的cube已经配置完毕。
我们点击齿轮创建工程
2.关于程序的编写
int main(void) { /* USER CODE BEGIN 1 */ uint16_t pwm_val = 0; /* USER CODE END 1 */ /* MCU Configuration----------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_TIM1_Init(); /* USER CODE BEGIN 2 */ HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1); HAL_GPIO_WritePin(GPIOA,GPIO_PIN_1,GPIO_PIN_SET) ; HAL_GPIO_WritePin(GPIOA,GPIO_PIN_2,GPIO_PIN_RESET); /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ while (pwm_val < 50) { pwm_val++; __HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, pwm_val); HAL_Delay(50); } while (pwm_val) { pwm_val--; __HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, pwm_val); HAL_Delay(50); } /* USER CODE END 3 */ } }
其中(1)在main函数中定义一个变量pwm_val用于控制PWM输出的占空比。
(2)HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1); //即在while(1)之前使能PWM输出通道CH1。
(3)HAL_GPIO_WritePin(GPIOA,GPIO_PIN_1,GPIO_PIN_SET) ;
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_2,GPIO_PIN_RESET); //定义IO
(4)在while(1)中不断改变PWM输出的占空比,控制电机的转动速度,实现一个电机转动速度由慢到快再由快到慢的的效果。周期约为5秒。要注意的是,配置的自动加载参数是99,在while(1) 中,占空比的变化是范围是0~50。
3.关于实物的连接
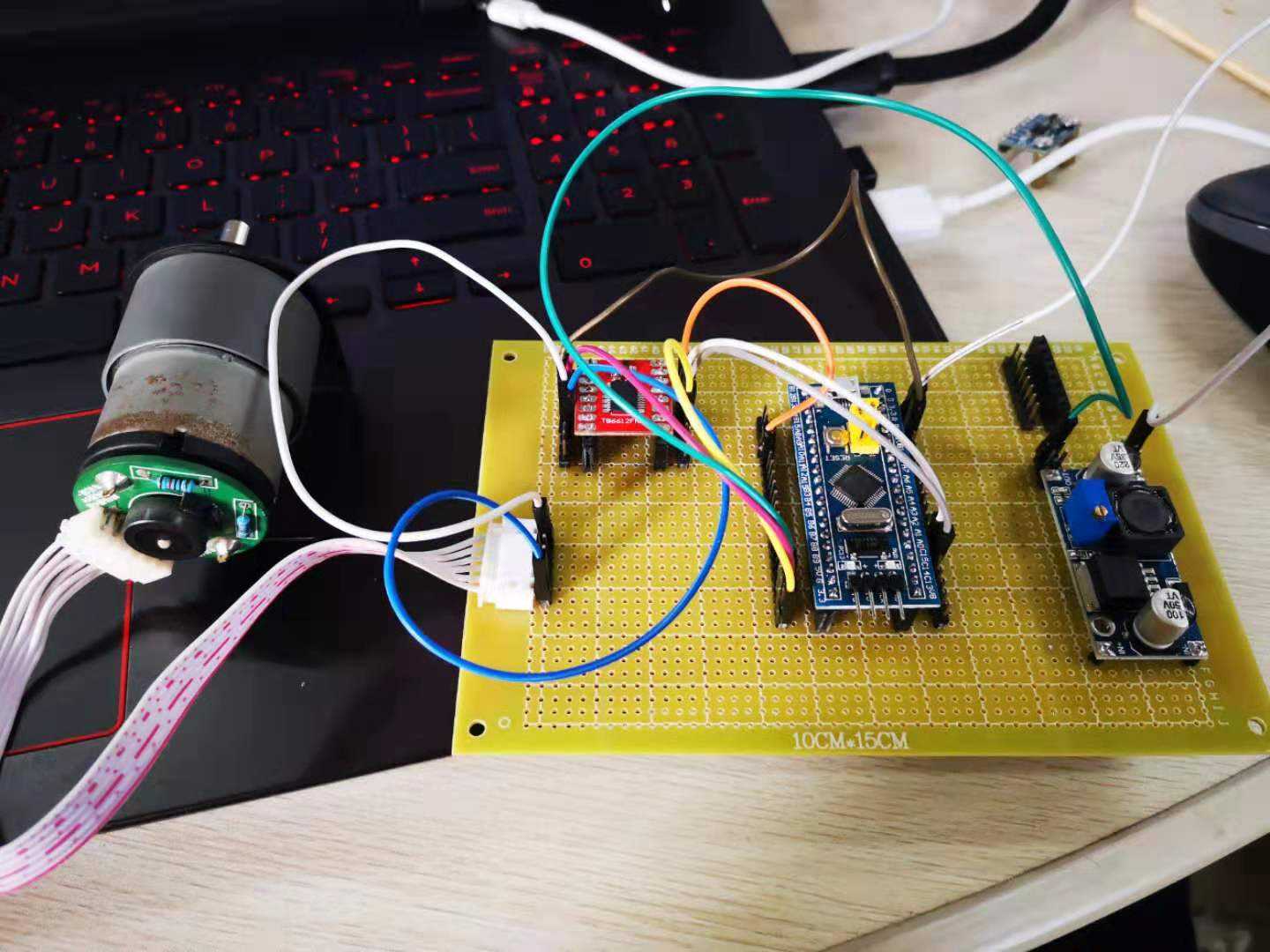
用HAL库结合STM cube编写代码控制stm32f103c8t6来驱动减速电机实现慢快逐步切换转动
标签:代码 system user 注意 clock 旋转 configure 完成 功能
原文地址:https://www.cnblogs.com/Wilson-hhx/p/10467945.html