标签:-- col 路径规划 属性 机器视觉 2.7 相同 time 没有
参考资料:
https://www.icourse163.org/course/ISCAS-1002580008?tid=1003713012 //中国大学MOOC
https://www.bilibili.com/video/av23401751 //B站
《ROS操作系统入门讲义》PDF下载
链接:https://pan.baidu.com/s/1OCja2WLDRnjYXMrpnZ3-sQ
提取码:mziy
第七章 rospy
一、rospy VS roscpp
1、位于 /opt/ros/kinetic/lib/python2.7/dist-packages/rospy //可以视为一个python的模块
2、区别
(1)rospy没有一个NodeHandle,创建publisher、subscriber等操作都被直接封装成了rospy中的函数或类,调用起来简单直观
(2)一些接口的命名不一致
注:
二、ROS中Python代码的组织方式
1、单独的python脚本:放于script/路径下 //适用于简单程序
your_package
——scripts/
————your_script.py
2、Python模块 //体量较大的程序
your_package
——src/
————your_package/
——————_init_.py
——————modulefiles.py
——scripts/
————your_script.py
——setup.py
注:
三、rospy常用API
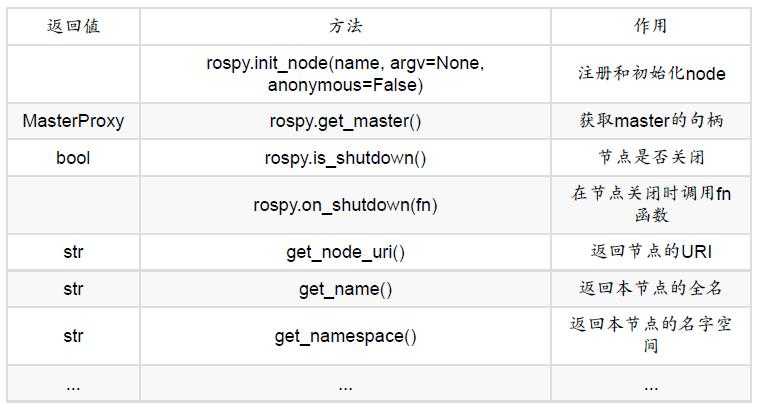
1、Node相关
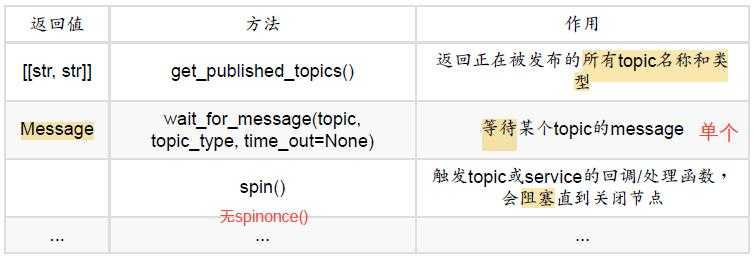
2、Topic相关
(1)函数
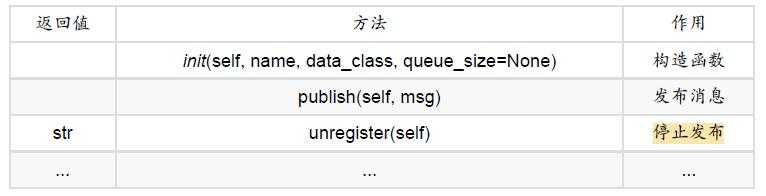
(2)Publisher类
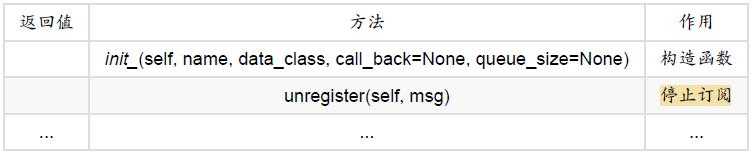
(3)Subscriber类
3、Service相关
(1)函数

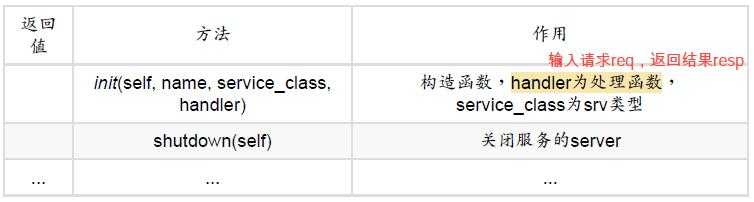
(2)Service类(server)
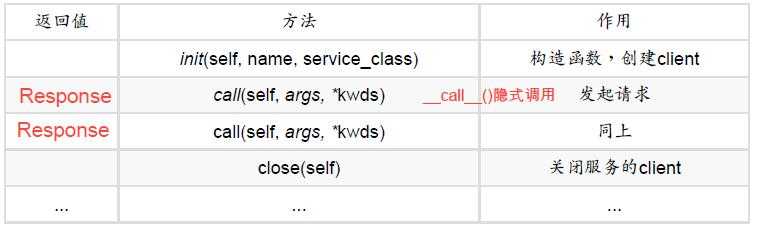
(3)ServiceProxy类(client)
4、Param相关
(1)函数
5、时钟相关
(1)函数
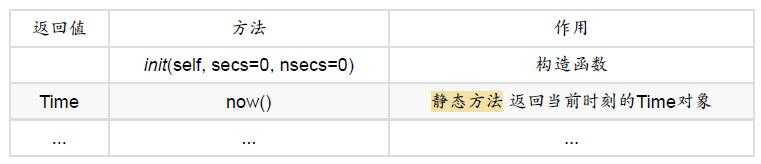
(2)Time类
(3)Duration类

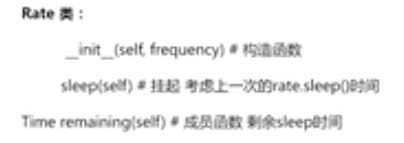
(4)Rate类
四、topic in rospy
1、自定义消息及模块生成
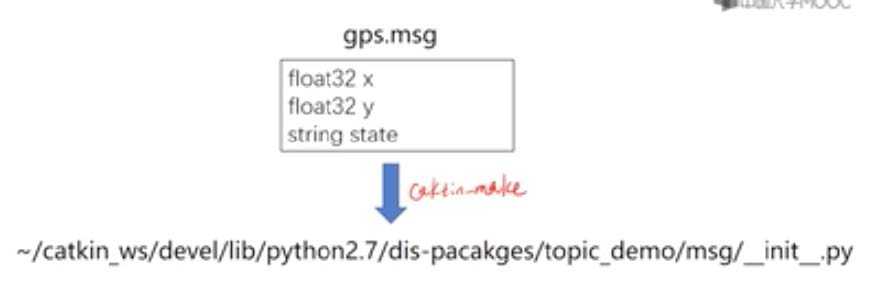
(1)gps.msg的定义:
string state #工作状态 float32 x #x坐标 float32 y #y坐标
(2)消息模块生成:创建的msg在catkin_make之后会在~/catkin_ws/devel/lib/python2.7/dist-packages/topic_demo下生成msg模块(module);随后可以在python程序中通过 from topic_demo import gps 进行调用
2、消息发布节点
(1)topic_demo/scripts/pytalker.py:

(2)与C++的区别
注:roscpp和rospy的接口并不一致;ROS2中解决了这个问题,不同的客户端库rclcpp和rclpy等都是基于共同的核心ROS客户端库rcl来开发的
3、消息订阅节点
(1)topic_demo/scripts/pylistener.py:
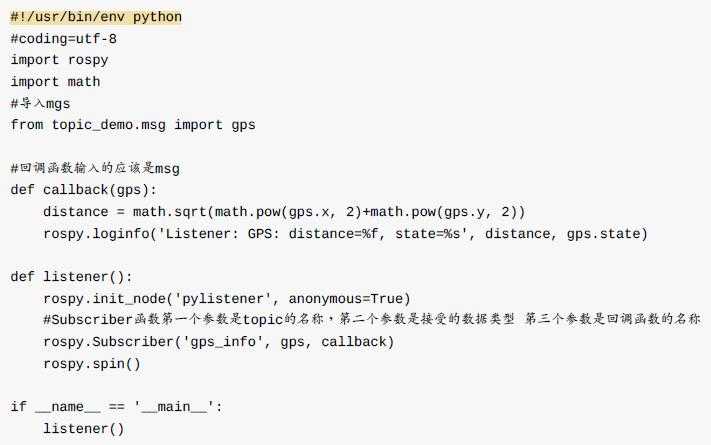
(2)与C++区别:rospy里没有 spinOnce() ,只有spin()
注:建立完talker和listener之后,经过 catkin_make ,就完成了python版的topic通信模型
Python是解释性语言,不需要使用Cmake进行编译,可以直接运行,但是“message_generation”需要经过Cmake编译,生成msg类型
五、service in rospy
1、srv文件 Greeting.srv
string name int32 age --- string feedback
注:必须先修改CMakeLists.txt文件,随后catkin编译系统会自动构建自定义的msg、srv和action文件,生成对应的C++、Python、LISP等语言下可用的库或模块
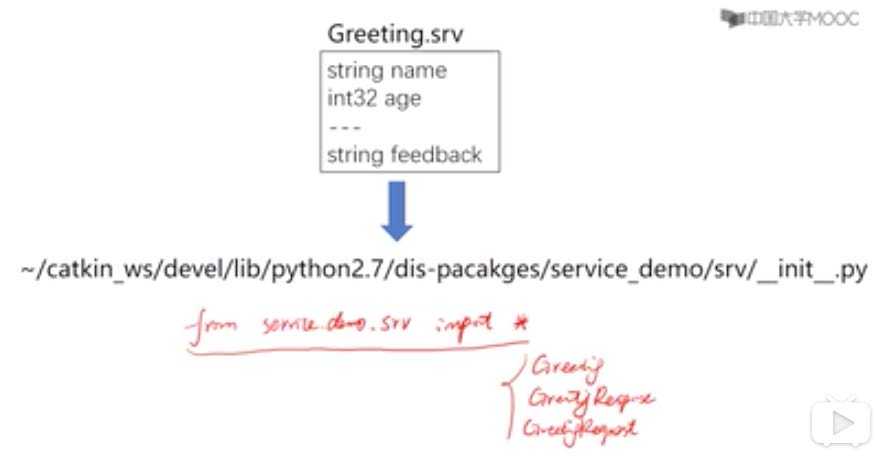
建立了一个msg或srv文件,不可以直接在程序中使用,必须在 CMakeLists.txt 中添加关于消息创建、指定消息/服务文件那几个宏命令
2、提供服务节点(server)
(1)service_demo/scripts/server_demo.py:

(2)与C++区别:server端的处理函数
C++的handle_function()传入的参数是整个srv对象的request和response两部分,返回值是bool型,显示这次服务是否成功地处理

Python的handle_function()传入的只有request,返回值是response

3、服务请求节点(client)
(1)service_demo/scripts/client_demo.py:

六、param与time
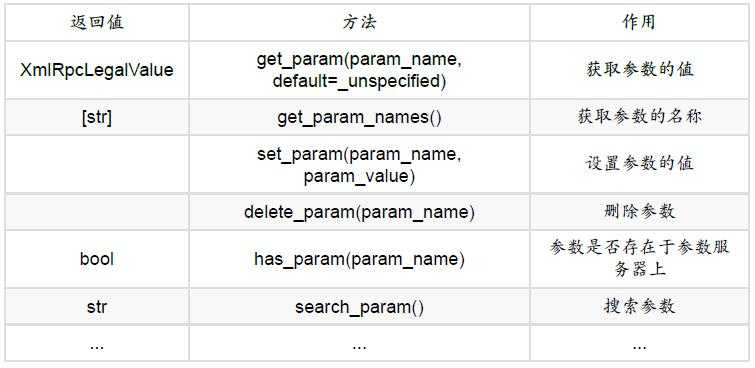
1、相比roscpp中有两套对param操作的API,rospy关于param的函数就显得简单多了,包括了增删查改等:
rospy.get_param() , rospy.set_param() , rospy.has_param() , rospy.delete_param() , rospy.search_param() , rospy.get_param_names()
2、param_demo:

3、时钟:rospy中的关于时钟的操作和roscpp是一致的,都有Time、Duration和Rate三个类 //Time标识的是某个时刻,如22:00;而Duration表示的是时长,如一周;
Time和Duration结构相同:
int32 secs #秒
int32 nsecs #纳秒
(1)创建Time和Duration:都是 _init_(self,secs=0, nsecs=0) ,指定秒和纳秒
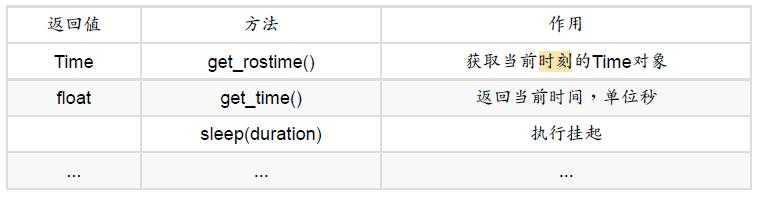
time_now1 = rospy.get_rostime() #当前时刻的Time对象 返回Time对象 time_now2 = rospy.Time.now() #同上 time_now3 = rospy.get_time() #得到当前时间,返回float 4单位秒 time_4 = rospy.Time(5) #创建5s的时刻 duration = rospy.Duration(3*60) #创建3min时长
注:于Time、Duration之间的加减法和类型转换,和roscpp中的完全一致
4、sleep
duration.sleep() #挂起 rospy.sleep(duration) #同上,这两种方式效果完全一致 loop_rate = Rate(5) #利用Rate来控制循环频率 while(rospy.is_shutdown()): loop_rate.sleep() #挂起,会考虑上次loop_rate.sleep的时间
注:Rate类中的sleep主要用来保持一个循环按照固定的频率,会考虑上次sleep的时间,从而使整个循环严格按照指定的频率
5、定时器Timer:不是用句柄来创建,而是直接 rospy.Timer(Duration, callback) ,第一个参数是时长,第二个参数是回调函数
def my_callback(event): #回调函数的传入值是 TimerEvent 类型 print ‘Timer called at ‘ + str(event.current_real)
rospy.Timer(rospy.Duration(2), my_callback) #每2s触发一次callback函数 rospy.spin() #触发回调函数
注:TimerEvent 类型包括以下属性
rospy.TimerEvent
last_expected
理想情况下为上一次回调应该发生的时间
last_real
上次回调实际发生的时间
current_expected
本次回调应该发生的时间
current_real
本次回调实际发生的时间
last_duration
上次回调所用的时间(结束-开始)
标签:-- col 路径规划 属性 机器视觉 2.7 相同 time 没有
原文地址:https://www.cnblogs.com/hg-love-dfc/p/10525747.html