标签:不同 更改 执行 相互 会话 包括 选项 碰撞 order
机电一体化概念设计首选项(机电概念首选项)可以更改默认的系统参数并将其应用到工作部件中,可以灵活地在工作部件中设置不同于用户默认设置的系统参数。在机电概念首选项中可以执行以下操作:
1 设置重力、摩擦和阻尼属性。
2 调整物理引擎。
3 设置仿真刷新频率。
4 更改仿真显示速度。
5 设置联合仿真主机和时序设置。
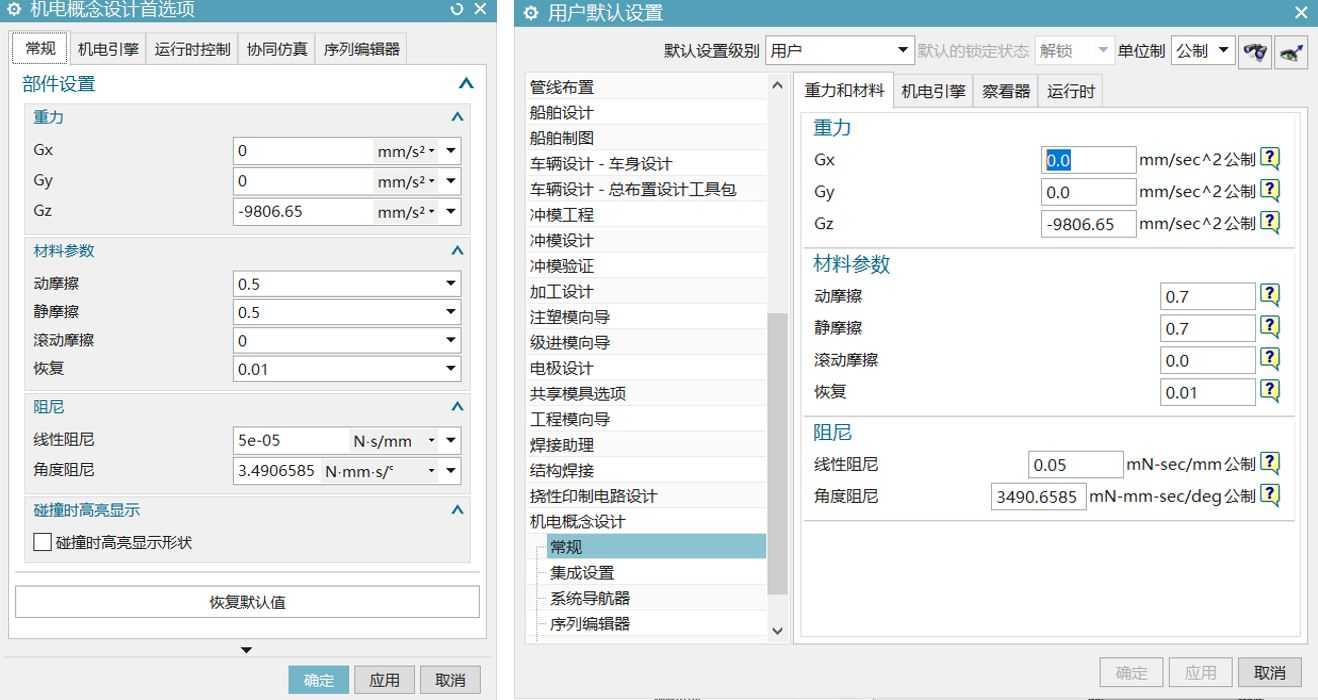
通常可以从两个地方对MCD的默认系统参数进行设置:用户默认设置(下图右)和机电概念首选项(下图左)。两者的区别在于:用户默认设置用于全局默认参数的设置,设置后需要重启NX才能生效。机电概念首选项设置的参数存储在工作部件中,只对当前工作部件有效,机电概念首选项设置的参数将会覆盖用户默认设置的参数。
各参数具体含义如下:
|
常规选项 |
|
|
重力 |
指定重力在全局坐标系中的 X, Y, Z 分量。 |
|
材料参数 |
指定材料的碰撞参数,包括动摩擦/动摩擦/滑动摩擦系数,以及恢复系数。 |
|
阻尼 |
指定线性或角度阻尼值,以降低振动幅度。 |
|
碰撞高亮 |
当碰撞体接触相似的碰撞体时,高亮显示模型中的碰撞体。 |
|
机电引擎选项 |
|
|
运行时参数 |
设置以下默认的运行时参数: 碰撞精度—设置碰撞检测的精度。当两个碰撞体距离小于等于该值,可以认为两个对象发生了碰撞。距离达到该值时物体可以相互穿透。较大的值更有效,但会导致更大的穿透率。 分布时间—设置最小时间增量。每个时间步长进行一次物理计算。动作不会在时间步长之内发生。较大的值会提高系统性能,但会降低准确性。 注意:步长过大可能会导致模拟不稳定,约束中断,物体获得无限能量。如果出现不稳定性,可以减小步长,使步长的倒数比系统中最快振荡的频率大10倍。默认步长为1毫秒,振荡频率低于100赫兹。 弹力乘数—指定在仿真过程中鼠标拖动对象时施加的力。 |
|
物理引擎调整 |
指定物理引擎的默认值。 公差—设置关节允许变动量,该距离仍被视为关节对齐(关节位置未改变)。较大的值求解得更快,但会导致关节定位中有更多的间隙。 误差减少量—设置决定关节位置求解速度的因子。较大的值会导致解算器以较少的步骤将关节拉在一起,但过高的值会导致不稳定。 最大迭代次数—设置每个时间步长的最大迭代次数,求解器使用该次数求解关节的位置,并使其所有位置都在公差范围内。较大的值会让求解器有更多的时间将大量关节放置到位,但求解可能需要更长的时间。 粘着力—设置碰撞体之间的结合力,以抵消碰撞引起的排斥力。 |
|
运行时控制选项 |
|
|
部件设置 显示多个零件时,这些设置仅适用于工作零件。 |
|
|
刷新精度( % ) |
指定查看器中值的刷新率,以确定是否更新UI中的属性值。 |
|
步长 |
指定查看器的步长,指定仿真期间采样点的时间间隔。 |
|
会话设置 当显示多个零件时,这些设置适用于整个仿真。 |
|
|
默认缩放因子 |
指定仿真的显示速率。 |
|
单步前进时间 |
指定仿真的时间增量,单步前进中仿真进行的时间量。 |
|
协同仿真选项 |
|
|
使用时间同步 |
同步MCD信号的PLCSIM Adv信号 PLCSIM Adv处于冻结模式。MCD比较仿真时间并和PLCSIM Adv保持同步。 |
|
启用SIMIT控制服务 |
设置运行启动SIMIT协同仿真。 |
|
主导程序 |
指定MCD或SIMIT控制哪个是仿真主导软件。 |
|
激活时间同步 |
当主机设置为MCD时可用。设置同步时间以设置数据传输间隔。 |
|
序列编辑器选项 |
|
|
导出后调用时序图 |
允许导出后打开时序文件。 |
|
系统导航选项 |
|
|
仅适用于集成到Teamcenter的NX。 |
|
|
保存时加载 |
设置加载选项。 |
|
选择修订规则 |
从Teamcenter加载模型时,将修订规则设置为。 |
 该公众号主要介绍工业仿真软件及虚拟调试技术,欢迎各位小伙伴们关注。
该公众号主要介绍工业仿真软件及虚拟调试技术,欢迎各位小伙伴们关注。
标签:不同 更改 执行 相互 会话 包括 选项 碰撞 order
原文地址:https://www.cnblogs.com/cosimulation/p/10527436.html