标签:nat software 界面 导入 还需要 拓展 gui 目录 拾取
打开roboguide,软件界面如下,接下来讲解一下“打开和新建工程文件”
首先介绍一下新建工程文件,在工具栏中点击新建按钮或者在文件(file)的下拉菜单中点击新建工程文件(new cell),弹出创建工程文件向导界面
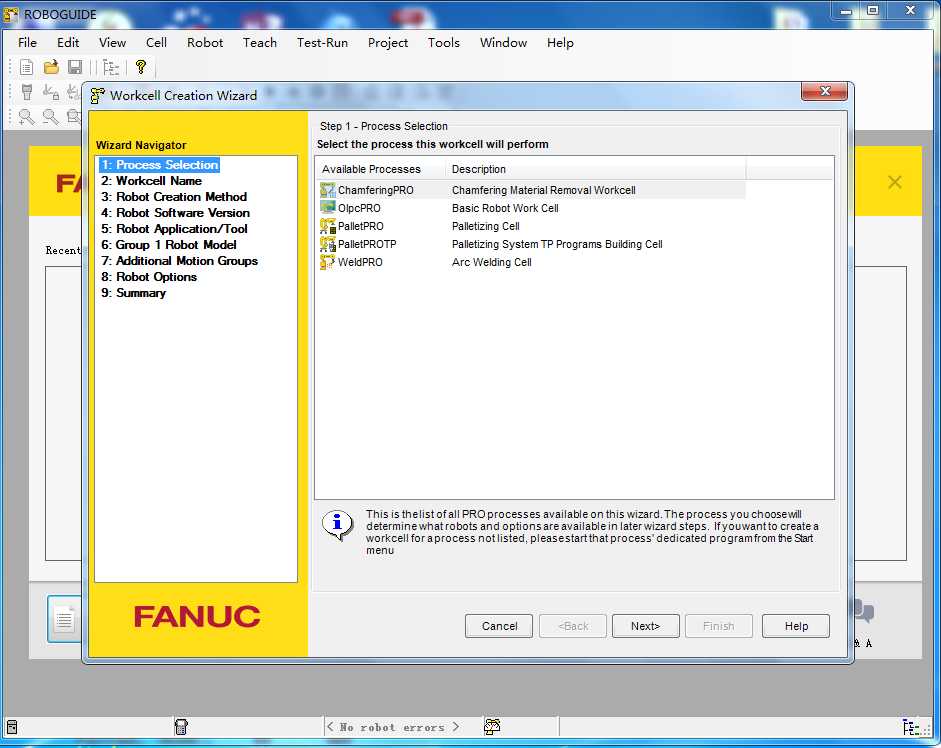
这里有多种模块可供大家选择,常用的有chamferingpro、handingpro、weldpro、palletpro和paintpro等模块。chamferingpro用于去毛刺、倒角仿真应用,handingpro用于机床上下料、冲压、装配、注塑机等物料搬运仿真应用,weldpro用于弧焊、激光切割等仿真应用,palletpro用于各种码垛仿真应用,paintpro用于喷涂仿真应用。
除了常用的模块之外,roboguide还包括其他的模块,方便用户快捷创建并优化机器人程序。例如,4D Edit编辑模块是将真实的3D机器人模型导入到示教器中,将3D模型和1D内部信息结合形成4D图像显示功能。Motionpro运动优化模块可以对TP程序进行优化,包括对节拍和路径的优化,节拍优化要求电机可接受的负荷范围内进行,路径优化需要设定一个允许偏离的距离,使机器人的运动路径在设定的偏离范围内接近示教点。IRPickpro模块可以通过简单设置后创建workcell自动生成布局,并以3D视图的形式显示单台或多台机器人抓放工件的过程,自动地生成告诉视觉拾取程序,进行高速视觉跟踪仿真。
Roboguide’还提供了一些功能的插件来拓展软件的功能,例如,当在roboguide中安装line tracking直线跟踪功能时,机器人可以自动补偿工件随导轨的流动,将绝对运动的工件当作相对静止的物体。因此,可以实现在不停止装配流水线的前提下,机器人对流水线上的工件进行相应的操作。安装coordinated motion协调运动软件时,机器人与外部轴做协调运动,使机器人处于合适的焊接姿态来提高焊接质量。Spray simulation插件可以根据实际情况建立喷枪模型,然后在roboguide中模拟喷涂效果,查看膜厚的分布情况。安装能源评估功能可以在给定的节拍内,优化程序使能源消耗最少,也可以在给定的能源消耗内,优化程序使节拍最短;寿命评估功能插件可以在给定的节拍内,优化程序使减速机寿命最长;也可在给定的寿命内,优化程序使节拍最短。
接下来,我将以handingpro为例来进行详细讲解。
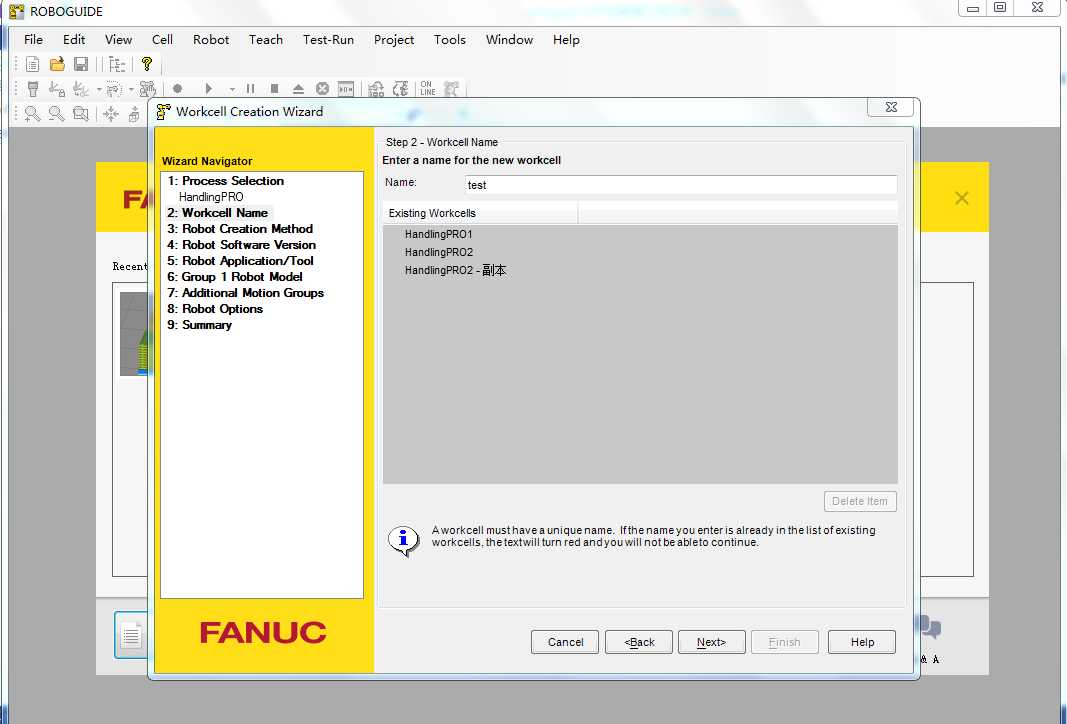
可以在name中填写工程文件的名字,也可以使用默认的命名,命名完成后点击NEXT,进行下一步
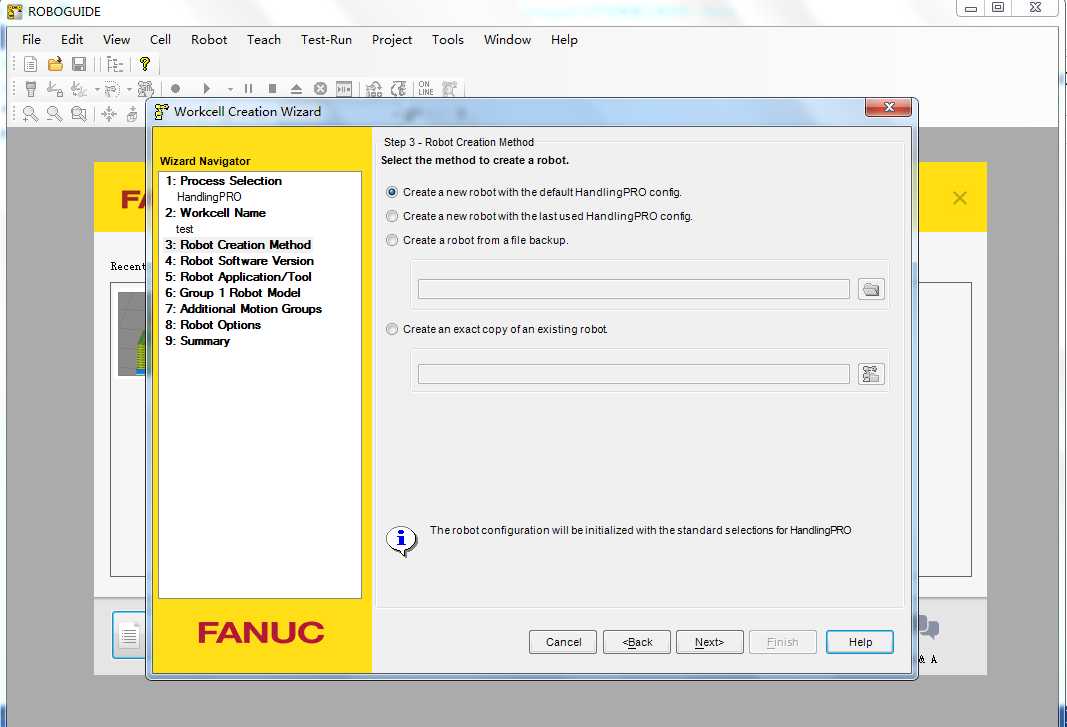
一般选用第一种创建方法,根据缺省值配置新建,选择完成后,点击NEXT进入下一步。如果已有一个机器人的镜像备份,想通过该软件查看程序的话,可以选择第三种创建方法,加载镜像文件即可。
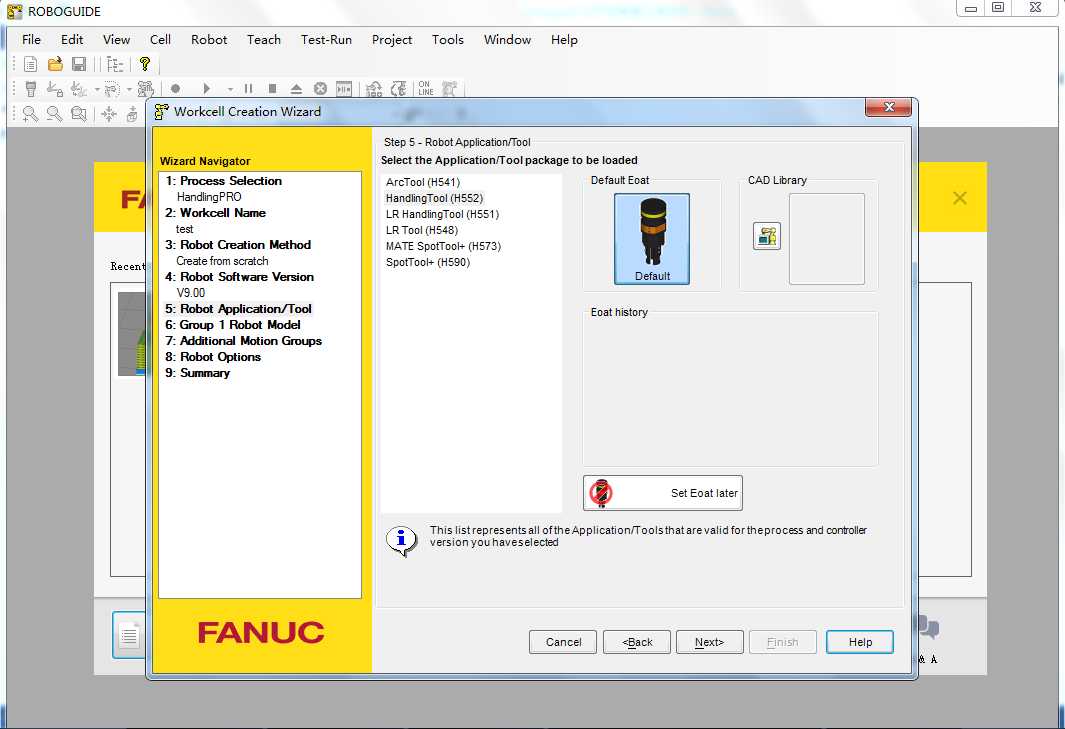
这里有多种选择,我们选择搬运工具,选择完成后点击NEXT进入下一步
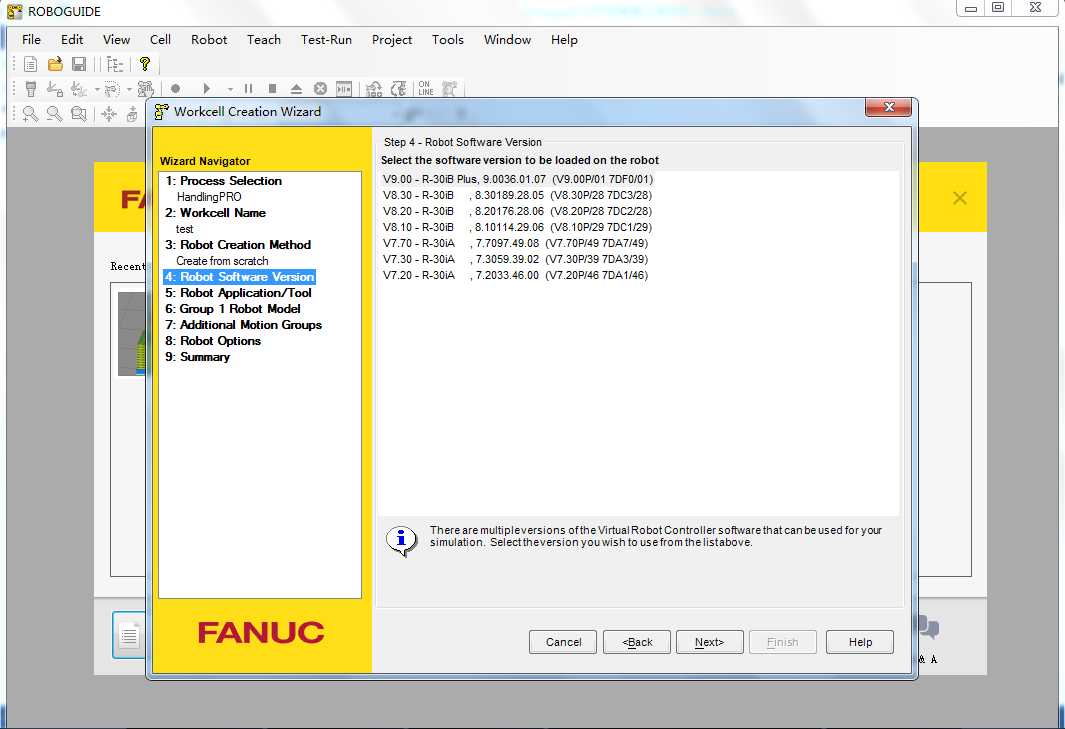
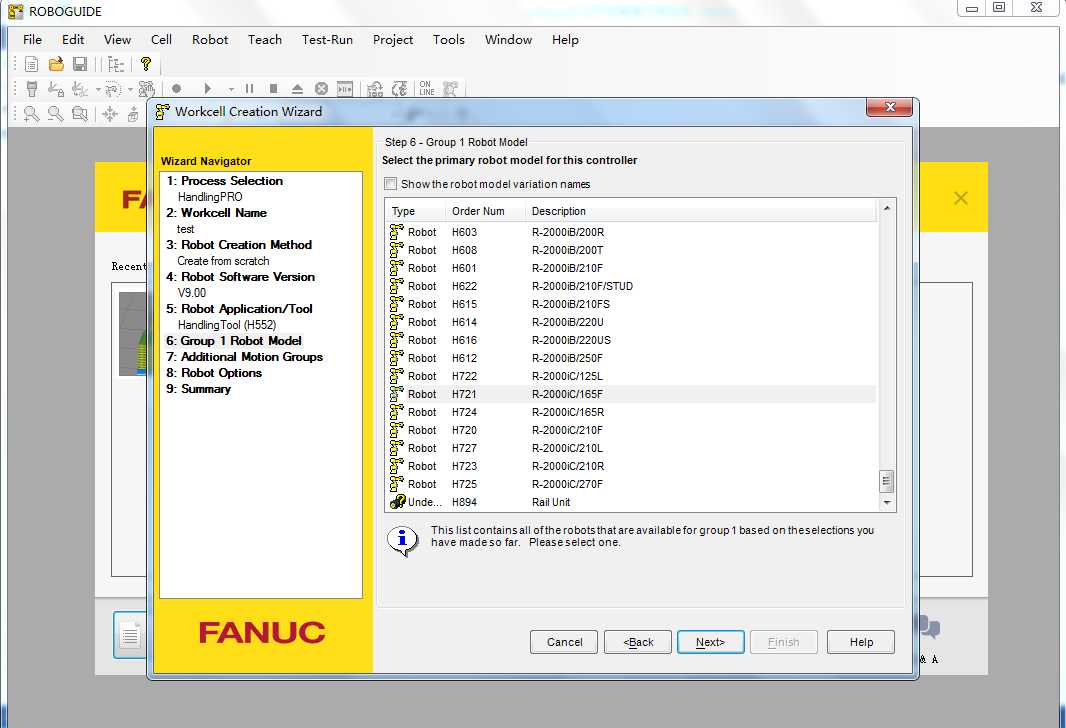
这里几乎包括所有型号的机器人,我们选择R-30iB,选择完成后点击NEXT进入下一步
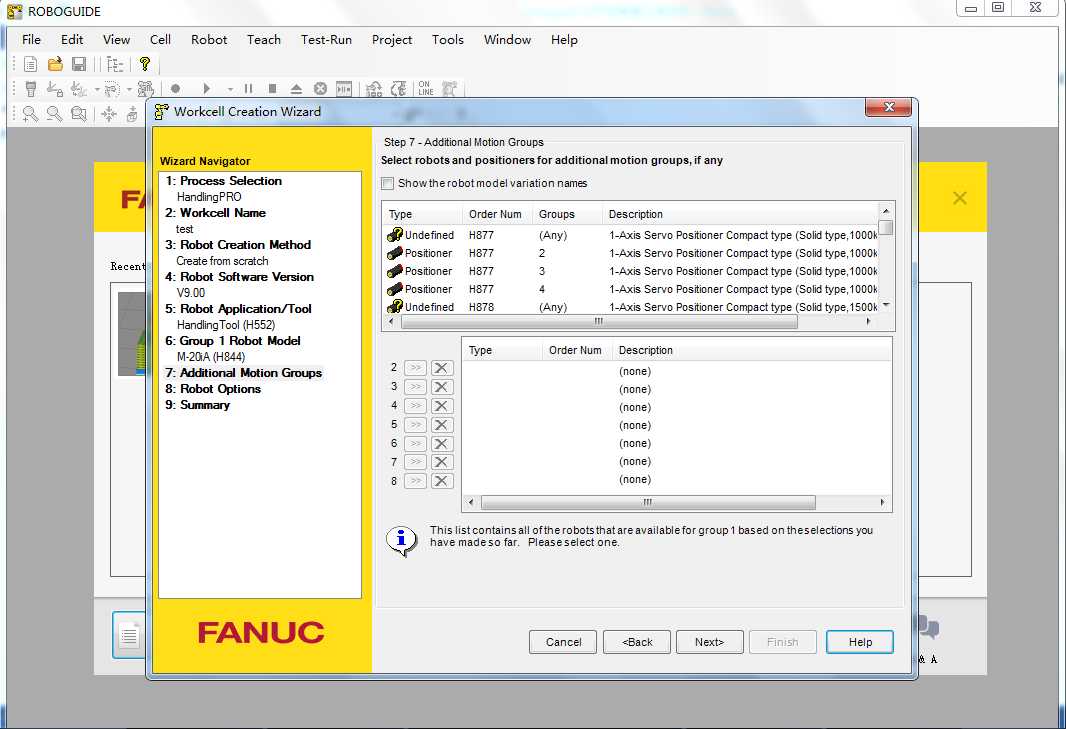
也可以在新建工程文件之后再添加,这里可以添加七组其他的设备,比如伺服枪、变位机等,这里先不添加,点击NEXT,进入下一步。
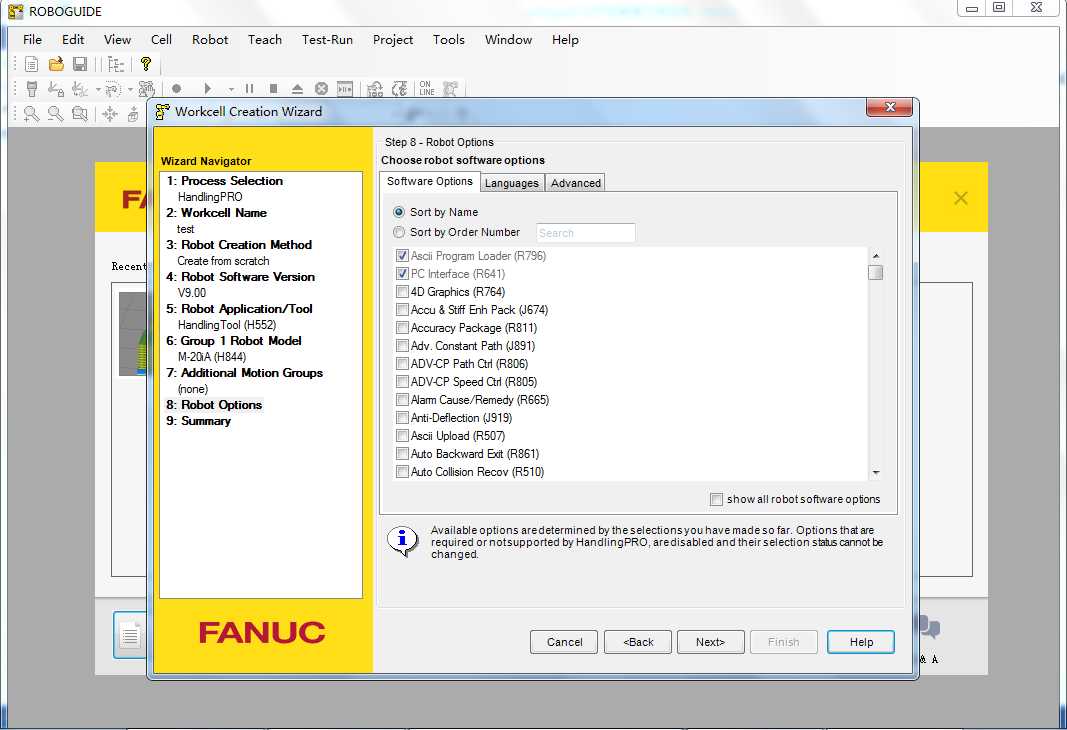
比如2D/3D视觉应用和附加轴等软件,都可以在这里添加
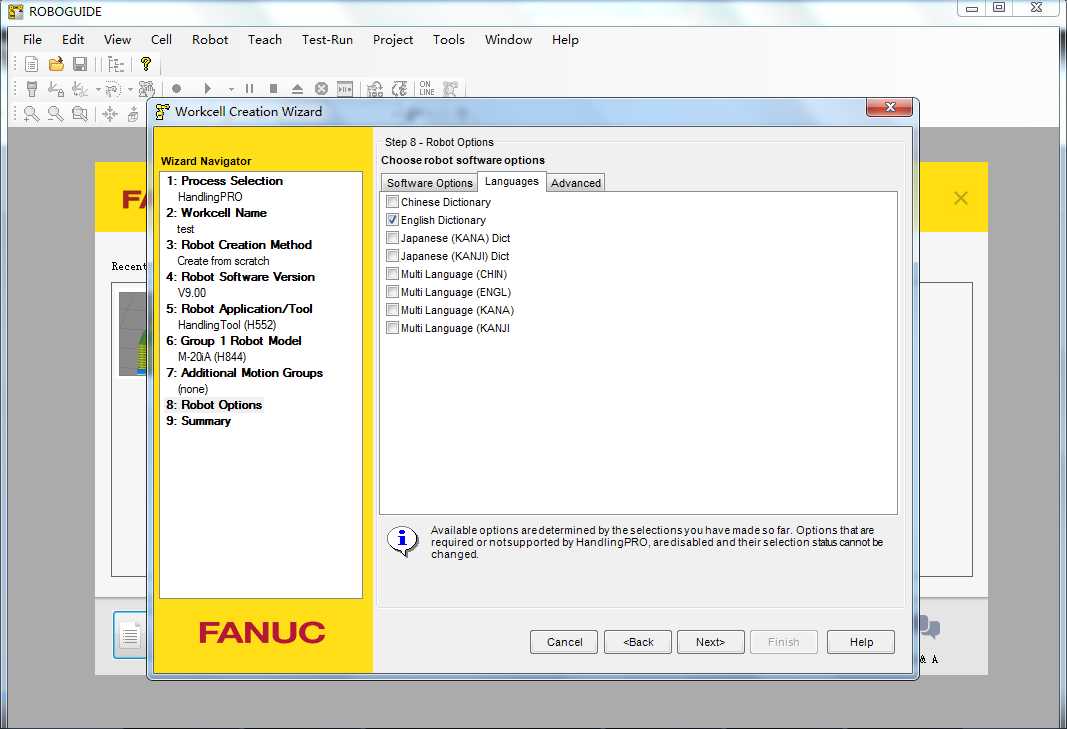
在语言选项卡中,可以选择当前运用的语言环境,我们可以选择中文语言环境,选择完成后,点击next,下一步
如果需要修改,点击back返回到需要修改的步骤,修改即可。
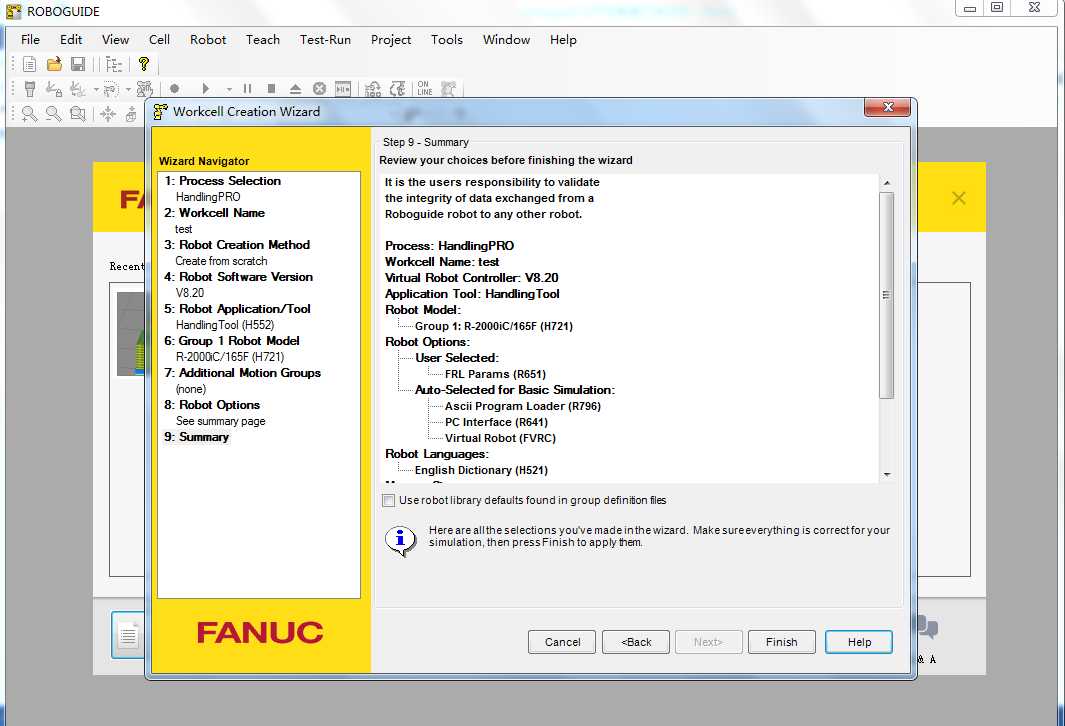
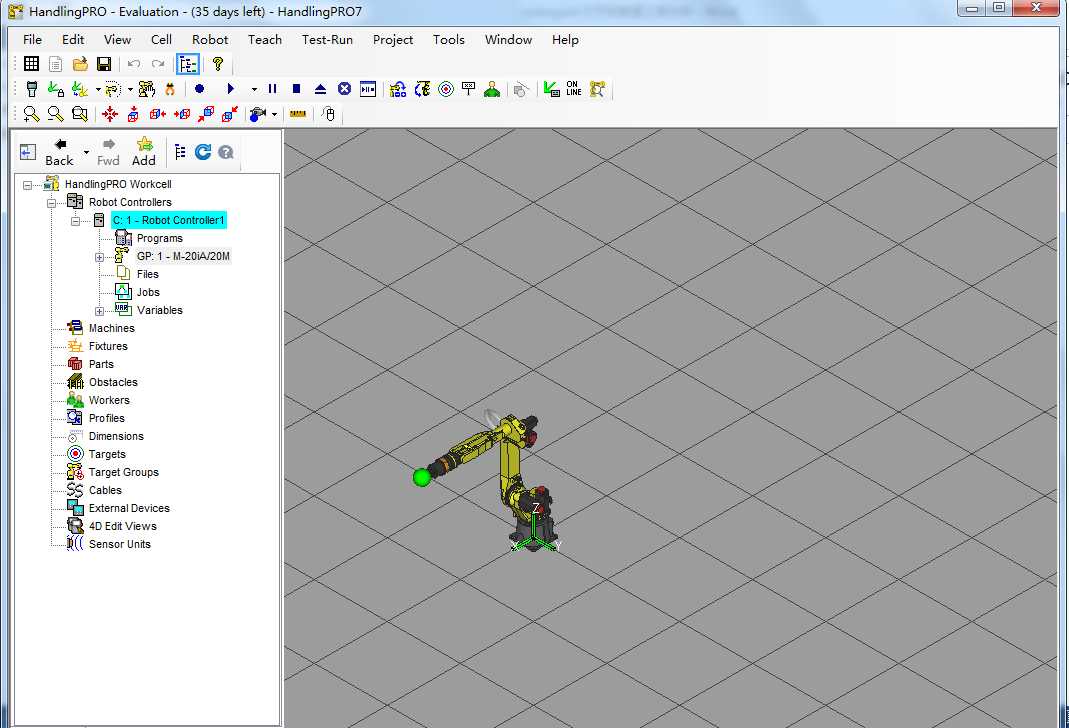
确认后,点击finish完成工程文件的创建,进入到仿真环境,控制器首先初始化
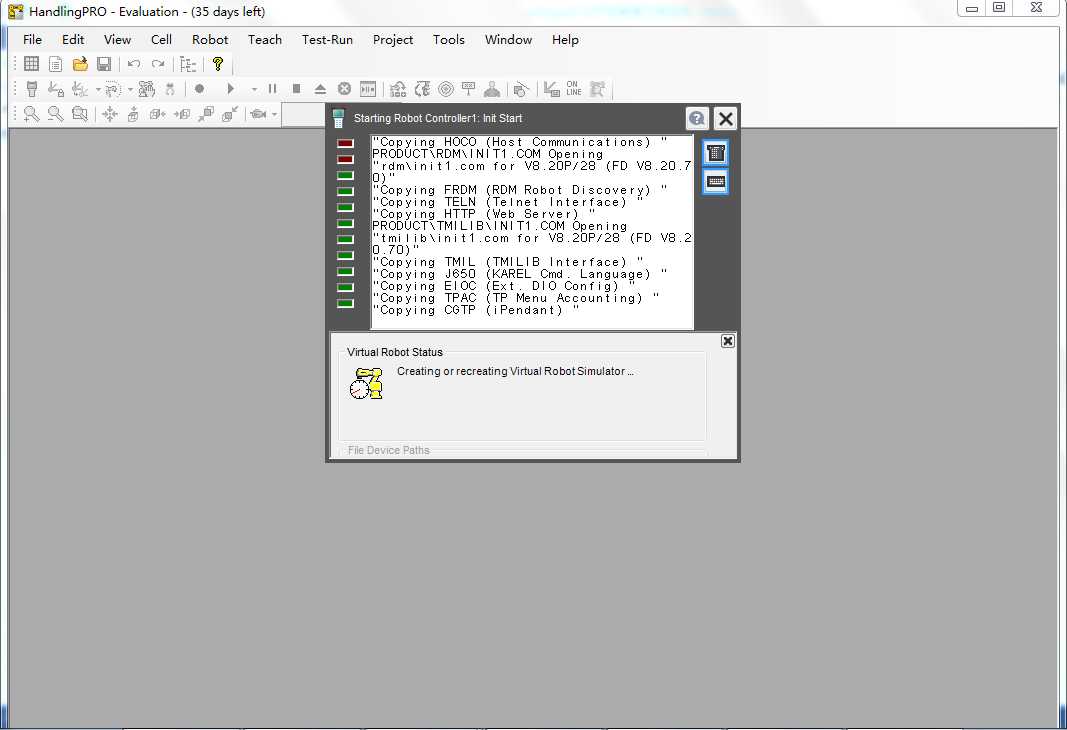
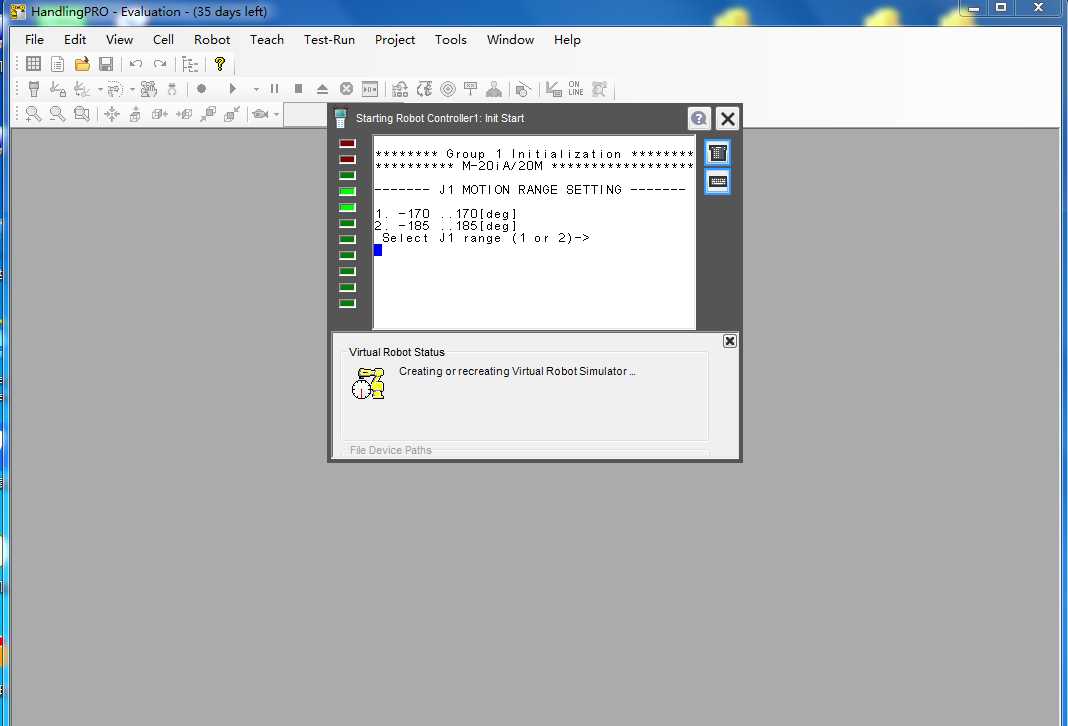
控制器初始化的过程中,可能还需要确认某些参数,例如,下图中需要选择J1的角度范围,假如选择1的话,输入1,回车确认即可,控制器会继续初始化进程。
标签:nat software 界面 导入 还需要 拓展 gui 目录 拾取
原文地址:https://www.cnblogs.com/zidonghuayuan/p/10667167.html