标签:像素 use detection issue 图像 数据集 key jpg pytho
Tusimple 是一家做自动驾驶的公司,他也公布了一些其在自动驾驶领域积累的数据,其中有一些是和车道线检测相关的。2018年6 月份,其举办了一次以摄像头图像数据做车道检测的比赛,公开了一部分数据及其标注。数据下载数据是:https://github.com/TuSimple/tusimple-benchmark/issues/3
在其doc中可以发现数据个数的一些说明

标注json 文件中每一行包括三个字段
raw_file : 每一个数据段的第20帧图像的的 path 路径
lanes 和 h_samples 是数据具体的标注内容,为了压缩,h_sample 是纵坐标(应该是从上到下拍好顺序的),lanes 是每个车道的横坐标,是个二维数组。
-2 表示这个点是无效的点
上面的数据就有 4 条车道线,第一条车道线的第一个点的坐标是(632,280)。
标注的过程应该是,将图片的下半部分如70%*height 等分成N份。然后取车道线(如论虚实)与该标注线交叉的点

利用以下脚本可以处理得到标注的数据,这个脚本稍微改动下也可以作为深度学习输入的图像。
# -*- coding: utf-8 -*-
import cv2
import json
import numpy as np
base_path = "/Users/jcl/workspace/lane_detection/"
file=open(base_path+‘test_label.json‘,‘r‘)
image_num=0
for line in file.readlines():
data=json.loads(line)
# print data[‘raw_file‘]
# 取第 29 帧 看一下处理的效果
if image_num == 29:
image=cv2.imread(base_path+data[‘raw_file‘])
# 二进制图像数组初始化
binaryimage=np.zeros((image.shape[0],image.shape[1],1),np.uint8)
# 实例图像数组初始化
instanceimage=binaryimage.copy()
arr_width=data[‘lanes‘]
arr_height=data[‘h_samples‘]
width_num=len(arr_width)
height_num=len(arr_height)
# print width_num
# print height_num
# 遍历纵坐标
for i in range(height_num):
lane_hist=40
# 遍历各个车道的横坐标
for j in range(width_num):
# 端点坐标赋值
if arr_width[j][i-1]>0 and arr_width[j][i]>0:
binaryimage[int(arr_height[i]),int(arr_width[j][i])]=255
instanceimage[int(arr_height[i]),int(arr_width[j][i])]=lane_hist
if i>0:
# 画线,线宽10像素
cv2.line(binaryimage, (int(arr_width[j][i-1]),int(arr_height[i-1])), (int(arr_width[j][i]),int(arr_height[i])), 255, 10)
cv2.line(instanceimage,(int(arr_width[j][i-1]),int(arr_height[i-1])), (int(arr_width[j][i]),int(arr_height[i])), lane_hist, 10)
lane_hist+=50
cv2.imshow(‘image.jpg‘,image)
cv2.waitKey()
cv2.imshow(‘binaryimage.jpg‘,binaryimage)
cv2.waitKey()
cv2.imshow(‘instanceimage.jpg‘,instanceimage)
cv2.waitKey()
break
# string1=base_path+"gt_image_binary/"+str(image_num)+".png"
# string2=base_path+"gt_image_instance/"+str(image_num)+".png"
# string3=base_path+"raw_image/"+str(image_num)+".png"
# cv2.imwrite(string1,binaryimage)
# cv2.imwrite(string2,instanceimage)
# cv2.imwrite(string3,image)
image_num = image_num + 1
file.close()
print "total image_num:"+str(image_num)
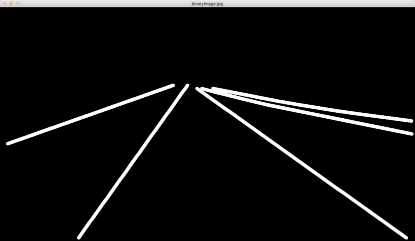
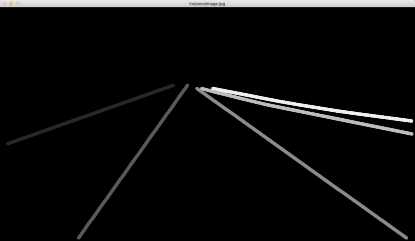
处理完之后图片输出如下所示:

Tusimple 数据的标注特点:
1、车道线实际上不只是道路上的标线,虚线被当作了一种实线做处理的。这里面双实线、白线、黄线这类信息也是没有被标注的。
2、每条线实际上是点序列的坐标集合,而不是区域集合
标签:像素 use detection issue 图像 数据集 key jpg pytho
原文地址:https://www.cnblogs.com/oftenlin/p/10670534.html