标签:std Locator class protect script tree ptr oid vector
Doc 来自PCL官方文档 http://www.pointclouds.org/documentation/tutorials/template_alignment.php#template-alignment
#include <limits>
#include <fstream>
#include <vector>
#include <Eigen/Core>
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/io/pcd_io.h>
#include <pcl/kdtree/kdtree_flann.h>
#include <pcl/filters/passthrough.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/features/normal_3d.h>
#include <pcl/features/fpfh.h>
#include <pcl/registration/ia_ransac.h>
class FeatureCloud
{
public:
// A bit of shorthand
typedef pcl::PointCloud<pcl::PointXYZ> PointCloud;
typedef pcl::PointCloud<pcl::Normal> SurfaceNormals;
typedef pcl::PointCloud<pcl::FPFHSignature33> LocalFeatures;
typedef pcl::search::KdTree<pcl::PointXYZ> SearchMethod;
FeatureCloud () :
search_method_xyz_ (new SearchMethod),
normal_radius_ (0.02f),
feature_radius_ (0.02f)
{}
~FeatureCloud () {}
// Process the given cloud
void
setInputCloud (PointCloud::Ptr xyz)
{
xyz_ = xyz;
processInput ();
}
// Load and process the cloud in the given PCD file
void
loadInputCloud (const std::string &pcd_file)
{
xyz_ = PointCloud::Ptr (new PointCloud);
pcl::io::loadPCDFile (pcd_file, *xyz_);
processInput ();
}
// Get a pointer to the cloud 3D points
PointCloud::Ptr
getPointCloud () const
{
return (xyz_);
}
// Get a pointer to the cloud of 3D surface normals
SurfaceNormals::Ptr
getSurfaceNormals () const
{
return (normals_);
}
// Get a pointer to the cloud of feature descriptors
LocalFeatures::Ptr
getLocalFeatures () const
{
return (features_);
}
protected:
// Compute the surface normals and local features
void
processInput ()
{
computeSurfaceNormals ();
computeLocalFeatures ();
}
// Compute the surface normals
void
computeSurfaceNormals ()
{
normals_ = SurfaceNormals::Ptr (new SurfaceNormals);
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> norm_est;
norm_est.setInputCloud (xyz_);
norm_est.setSearchMethod (search_method_xyz_);
norm_est.setRadiusSearch (normal_radius_);
norm_est.compute (*normals_);
}
// Compute the local feature descriptors
void
computeLocalFeatures ()
{
features_ = LocalFeatures::Ptr (new LocalFeatures);
pcl::FPFHEstimation<pcl::PointXYZ, pcl::Normal, pcl::FPFHSignature33> fpfh_est;
fpfh_est.setInputCloud (xyz_);
fpfh_est.setInputNormals (normals_);
fpfh_est.setSearchMethod (search_method_xyz_);
fpfh_est.setRadiusSearch (feature_radius_);
fpfh_est.compute (*features_);
}
private:
// Point cloud data
PointCloud::Ptr xyz_;
SurfaceNormals::Ptr normals_;
LocalFeatures::Ptr features_;
SearchMethod::Ptr search_method_xyz_;
// Parameters
float normal_radius_;
float feature_radius_;
};
class TemplateAlignment
{
public:
// A struct for storing alignment results
struct Result
{
float fitness_score;
Eigen::Matrix4f final_transformation;
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
};
TemplateAlignment () :
min_sample_distance_ (0.05f),
max_correspondence_distance_ (0.01f*0.01f),
nr_iterations_ (500)
{
// Initialize the parameters in the Sample Consensus Initial Alignment (SAC-IA) algorithm
sac_ia_.setMinSampleDistance (min_sample_distance_);
sac_ia_.setMaxCorrespondenceDistance (max_correspondence_distance_);
sac_ia_.setMaximumIterations (nr_iterations_);
}
~TemplateAlignment () {}
// Set the given cloud as the target to which the templates will be aligned
void
setTargetCloud (FeatureCloud &target_cloud)
{
target_ = target_cloud;
sac_ia_.setInputTarget (target_cloud.getPointCloud ());
sac_ia_.setTargetFeatures (target_cloud.getLocalFeatures ());
}
// Add the given cloud to the list of template clouds
void
addTemplateCloud (FeatureCloud &template_cloud)
{
templates_.push_back (template_cloud);
}
// Align the given template cloud to the target specified by setTargetCloud ()
void
align (FeatureCloud &template_cloud, TemplateAlignment::Result &result)
{
sac_ia_.setInputCloud (template_cloud.getPointCloud ());
sac_ia_.setSourceFeatures (template_cloud.getLocalFeatures ());
pcl::PointCloud<pcl::PointXYZ> registration_output;
sac_ia_.align (registration_output);
result.fitness_score = (float) sac_ia_.getFitnessScore (max_correspondence_distance_);
result.final_transformation = sac_ia_.getFinalTransformation ();
}
// Align all of template clouds set by addTemplateCloud to the target specified by setTargetCloud ()
void
alignAll (std::vector<TemplateAlignment::Result, Eigen::aligned_allocator<Result> > &results)
{
results.resize (templates_.size ());
for (size_t i = 0; i < templates_.size (); ++i)
{
align (templates_[i], results[i]);
}
}
// Align all of template clouds to the target cloud to find the one with best alignment score
int
findBestAlignment (TemplateAlignment::Result &result)
{
// Align all of the templates to the target cloud
std::vector<Result, Eigen::aligned_allocator<Result> > results;
alignAll (results);
// Find the template with the best (lowest) fitness score
float lowest_score = std::numeric_limits<float>::infinity ();
int best_template = 0;
for (size_t i = 0; i < results.size (); ++i)
{
const Result &r = results[i];
if (r.fitness_score < lowest_score)
{
lowest_score = r.fitness_score;
best_template = (int) i;
}
}
// Output the best alignment
result = results[best_template];
return (best_template);
}
private:
// A list of template clouds and the target to which they will be aligned
std::vector<FeatureCloud> templates_;
FeatureCloud target_;
// The Sample Consensus Initial Alignment (SAC-IA) registration routine and its parameters
pcl::SampleConsensusInitialAlignment<pcl::PointXYZ, pcl::PointXYZ, pcl::FPFHSignature33> sac_ia_;
float min_sample_distance_;
float max_correspondence_distance_;
int nr_iterations_;
};
// Align a collection of object templates to a sample point cloud
int
main (int argc, char **argv)
{
if (argc < 3)
{
printf ("No target PCD file given!\n");
return (-1);
}
// Load the object templates specified in the object_templates.txt file
std::vector<FeatureCloud> object_templates;
std::ifstream input_stream (argv[1]);
object_templates.resize (0);
std::string pcd_filename;
while (input_stream.good ())
{
std::getline (input_stream, pcd_filename);
if (pcd_filename.empty () || pcd_filename.at (0) == ‘#‘) // Skip blank lines or comments
continue;
FeatureCloud template_cloud;
template_cloud.loadInputCloud (pcd_filename);
object_templates.push_back (template_cloud);
}
input_stream.close ();
// Load the target cloud PCD file
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile (argv[2], *cloud);
// Preprocess the cloud by...
// ...removing distant points
const float depth_limit = 1.0;
pcl::PassThrough<pcl::PointXYZ> pass;
pass.setInputCloud (cloud);
pass.setFilterFieldName ("z");
pass.setFilterLimits (0, depth_limit);
pass.filter (*cloud);
// ... and downsampling the point cloud
const float voxel_grid_size = 0.005f;
pcl::VoxelGrid<pcl::PointXYZ> vox_grid;
vox_grid.setInputCloud (cloud);
vox_grid.setLeafSize (voxel_grid_size, voxel_grid_size, voxel_grid_size);
//vox_grid.filter (*cloud); // Please see this http://www.pcl-developers.org/Possible-problem-in-new-VoxelGrid-implementation-from-PCL-1-5-0-td5490361.html
pcl::PointCloud<pcl::PointXYZ>::Ptr tempCloud (new pcl::PointCloud<pcl::PointXYZ>);
vox_grid.filter (*tempCloud);
cloud = tempCloud;
// Assign to the target FeatureCloud
FeatureCloud target_cloud;
target_cloud.setInputCloud (cloud);
// Set the TemplateAlignment inputs
TemplateAlignment template_align;
for (size_t i = 0; i < object_templates.size (); ++i)
{
template_align.addTemplateCloud (object_templates[i]);
}
template_align.setTargetCloud (target_cloud);
// Find the best template alignment
TemplateAlignment::Result best_alignment;
int best_index = template_align.findBestAlignment (best_alignment);
const FeatureCloud &best_template = object_templates[best_index];
// Print the alignment fitness score (values less than 0.00002 are good)
printf ("Best fitness score: %f\n", best_alignment.fitness_score);
// Print the rotation matrix and translation vector
Eigen::Matrix3f rotation = best_alignment.final_transformation.block<3,3>(0, 0);
Eigen::Vector3f translation = best_alignment.final_transformation.block<3,1>(0, 3);
printf ("\n");
printf (" | %6.3f %6.3f %6.3f | \n", rotation (0,0), rotation (0,1), rotation (0,2));
printf ("R = | %6.3f %6.3f %6.3f | \n", rotation (1,0), rotation (1,1), rotation (1,2));
printf (" | %6.3f %6.3f %6.3f | \n", rotation (2,0), rotation (2,1), rotation (2,2));
printf ("\n");
printf ("t = < %0.3f, %0.3f, %0.3f >\n", translation (0), translation (1), translation (2));
// Save the aligned template for visualization
pcl::PointCloud<pcl::PointXYZ> transformed_cloud;
pcl::transformPointCloud (*best_template.getPointCloud (), transformed_cloud, best_alignment.final_transformation);
pcl::io::savePCDFileBinary ("output.pcd", transformed_cloud);
return (0);
}
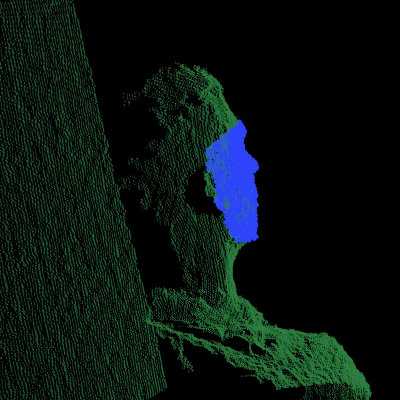
结果查看
pcl_viewer_debug.exe person.pcd output.pcd
标签:std Locator class protect script tree ptr oid vector
原文地址:https://www.cnblogs.com/flyinggod/p/10737215.html