标签:技术 euler https 基本 角度 有关 就会 ref dia
空间中有三个旋转欧拉角α,β,γ,依次绕x,y,z旋转α,β,γ。可以通过构建旋转矩阵Rx,Ry,Rz得到旋转矩阵R=Rz(γ)Ry(β)Rx(α)
空间某点m(x,y,z)在新的坐标系下的坐标为:Rm(x,y,z)
旋转矩阵计算欧拉角公式:

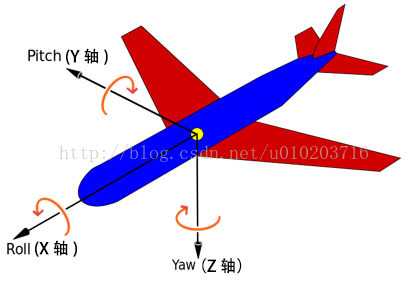
俯仰角θ(pitch):围绕Y轴旋转的角度。 偏航角ψ(yaw):围绕Z轴旋转的角度。 滚转角Φ(roll):围绕X轴旋转的角度。
标签:技术 euler https 基本 角度 有关 就会 ref dia
原文地址:https://www.cnblogs.com/liuzhenbo/p/10749458.html