标签:快速 span 了解 LLC 缺点 == 外部 滤波 除了
完整教程下载地址:http://forum.armfly.com/forum.php?mod=viewthread&tid=86980
本章教程继续为大家讲解学习STM32H7的必备知识点电源,复位和时钟系统。掌握这三方面的知识点对后面的学习大有裨益。
14.1 初学者重要提示
14.2 电源
14.3 硬件复位
14.4 软件复位
14.5 RCC时钟控制
14.6 总结
1、 电源管理部分涉及到的各种低功耗方式会在后面章节中为大家讲解,当前阶段仅需了解低功耗属于电源管理部分即可。
2、 电源管理部分最繁琐的就是CPU,D1,D2,D3域的各种运行,待机,停机状态切换,这部分知识点也放在后面低功耗章节学习。
电源是系统稳定运行的根本,主要分为以下几个知识点,电源供电、供电监控、电源管理和低功耗。当前阶段主要了解电源供电和硬件上电时序。
学习STM32H7的电源供电,往往被一堆电源标识Vdd,Vdda,Vcap,Vss等搞迷糊,这些标识整明白了,电源供电部分也就理解了,首先看下面的框图:
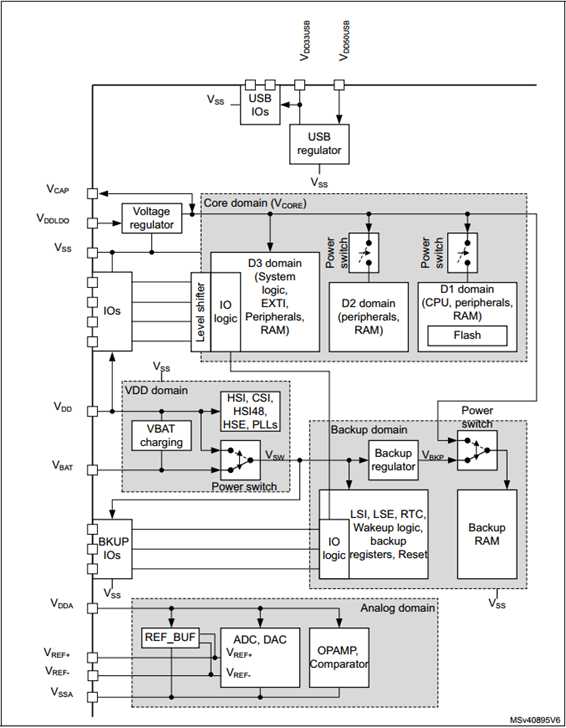
这些常用标识的解释如下:
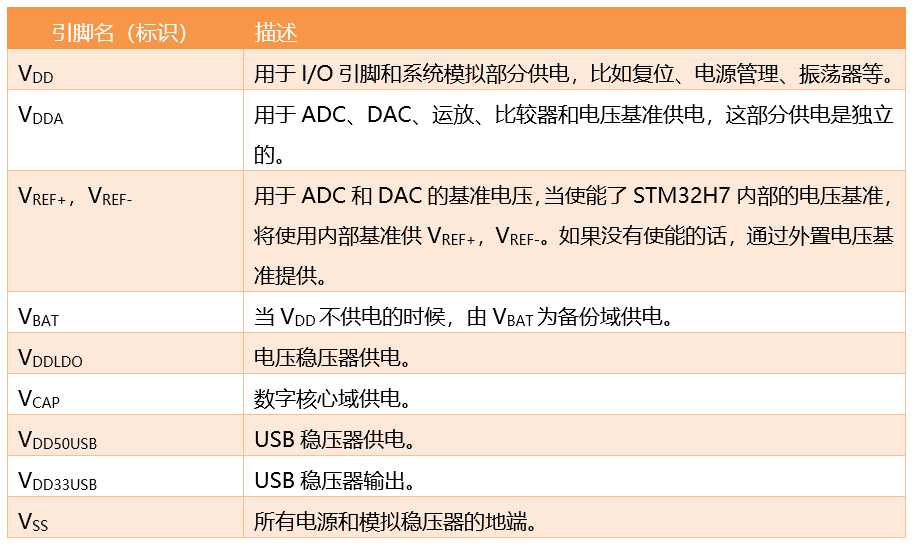
对于电源供电部分了解了这些知识点就够用。
系统上电到程序开始运行期间,H7都做哪些工作,一张时序图可以说明问题:
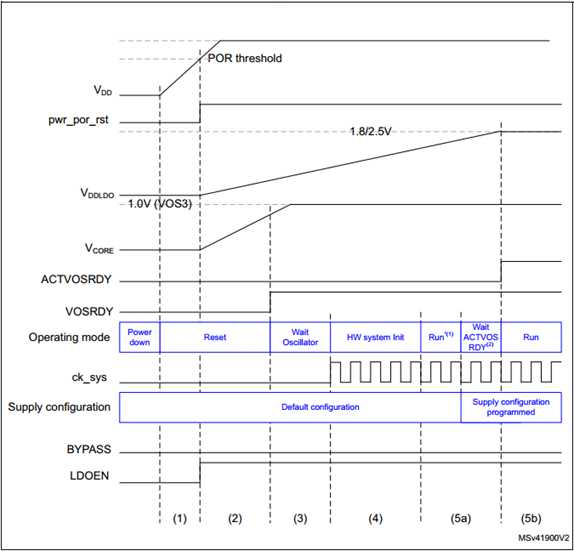
对于上面的截图,主要看Operating mode部分,依次是Power down –> Reset -> Wait Oscillator ->HW system init -> Run -> Wait ACTVOS RDY –> Run,即断电状态 -> 复位状态 -> 等待HSI就绪->硬件初始化 -> 运行 -> 等ACTVOS位就绪 -> 正式运行。
详细些的执行流程如下:
关于电源管理部分,H7参考手册中讲解的还挺复杂的,当前阶段我们仅需了解几个重要的工作状态即可,看到这几个单词了要认识,因为官方文档中多处要用这几个标识。
为了实现各种低功耗模式,CPU和D1,D2,D3域支持的各种模式如下:
CRun:运行状态,CPU和CPU子系统外设正常运行。
CSleep:休眠状态,CPU时钟停止运行,CPU子系统外设正常运行。
CStop:停止状态,CPU和CPU子系统外设都停止运行。
DRun:运行状态,D1域的总线矩阵正常运行,CPU子系统运行在CRun或者CSleep模式。
DStop:停机状态,D1域的总线矩阵时钟停止运行,CPU子系统运行在CStop模式,PDDS_D1位选择DStop模式。
DStandby:待机状态,D1域的总线矩阵断电,CPU子系统运行在CStop模式,PDDS_D1位选择DStandby模式。
DRun:运行状态,D2域的总线矩阵正常运行,CPU子系统在D2域中有分配的外设,CPU子系统运行在CRun或者CSleep模式。
DStop:停机状态,D2域的总线矩阵时钟停止运行,CPU子系统没有在D2域分配外设,PDDS_D1位选择DStop模式。或者CPU子系统在D2域中有分配的外设,CPU子系统运行在CStop模式,PDDS_D1位选择DStop模式。
DStandby:待机状态,D2域的总线矩阵断电,CPU子系统没有在D2域分配外设,PDDS_D1位选择DStandby模式。或者CPU子系统在D2域中有分配的外设,CPU子系统运行在CStop模式,PDDS_D1位选择DStandby模式。
Run:运行状态,系统时钟和D3域总线矩阵时钟处于运行状态。CPU子系统处于CRun和CSleep模式,或者一个唤醒信号处于激活状态。
Stop:停止状态,系统时钟和D3域总线矩阵时钟处于停止状态,CPU子系统处于CStop模式。所有的唤醒信号都处于非激活状态,并且至少某个域的一个PDDS_Dn位选择了Stop模式。
Standby:待机状态,系统处于断电状态,CPU子系统处于CStop模式,所有的唤醒信号都处于非激活状态,并且所有域的所有PDDS_Dn位选择Standby模式。
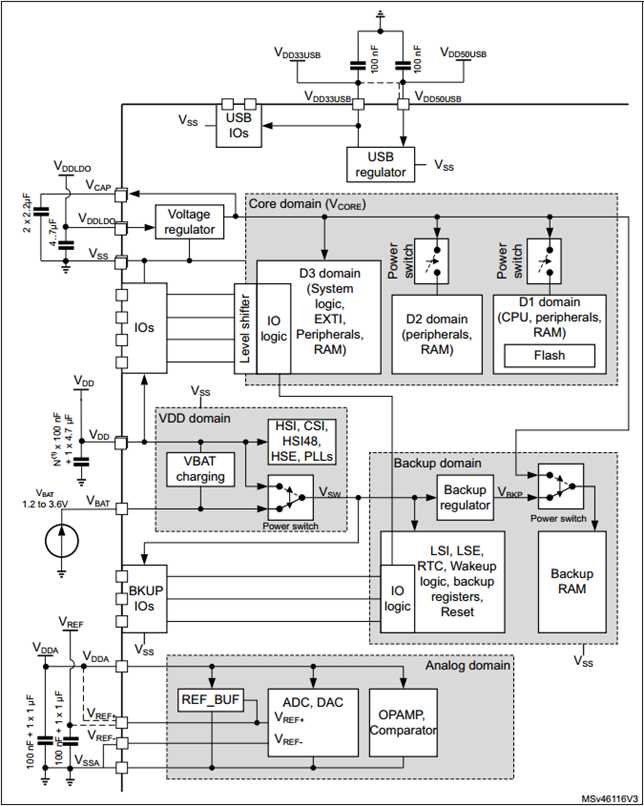
每个电源对 (VDD/VSS, VDDA/VSSA ...)必须使用下述的滤波陶瓷电容去耦。这些电容必须尽量靠近芯片引脚,以确保器件正常工作。不建议去掉滤波电容来降低PCB 尺寸或成本,这可能导致器件工作不正常。
所有数字计算机系统都是由某种形式的震荡时钟电路驱动的。这种电路被称为系统的“脉搏”,是系统正确运行的关键。如果振荡器失灵,系统将完全无法运行,如果振荡器运行不规律,系统执行的所有与时间有关的计算都会有误差。
所有微控制器的启动流程都不通用。由于硬件的复杂性,必须运行一段由厂家定义的短小的“复位程序”来使硬件处于一种正确的状态,然后再开始执行用户程序。运行这个复位程序需要时间并且要求微控制器的振荡器已经运行。
当系统由可靠的电源供电时,一旦通电,电源迅速地达到额定输出电压,一旦断电,电源迅速地下降到0V,并且在接通的时候,电压不会降低。这时能够可靠地使用基于一个电容和一个电阻的低成本硬件复位。这种形式的复位电路称为阻容复位。
如果电源不够可靠,而涉及安全性,这种简单的阻容解决方案就不合适了。
STM32H7开发板的硬件复位原理图如下:
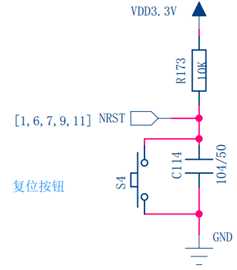
注,根据需要,大家也可以使用STM32H7 NRST引脚的内部上拉:http://forum.armfly.com/forum.php?mod=viewthread&tid=9314
前面第11章的13.3.1小节讲解了复位系列的相关知识,再结合本章节的上电复位和下电复位,大家会对其有一个较全面的认识,更多复位序列的知识直接看13.3.1小节即可。
除了上电和手动复位,程序设计设置中还经常要用到软件复位,即调用一条函数就可以实现复位功能。此函数已经由CMSIS软件包中的core_cm7.h文件提供,函数如下:
/** \brief System Reset \details Initiates a system reset request to reset the MCU. */ __STATIC_INLINE void __NVIC_SystemReset(void) { __DSB(); /* Ensure all outstanding memory accesses included buffered write are completed before reset */ SCB->AIRCR = (uint32_t)((0x5FAUL << SCB_AIRCR_VECTKEY_Pos) | (SCB->AIRCR & SCB_AIRCR_PRIGROUP_Msk) | SCB_AIRCR_SYSRESETREQ_Msk ); /* Keep priority group unchanged */ __DSB(); /* Ensure completion of memory access */ for(;;) /* wait until reset */ { __NOP(); } }
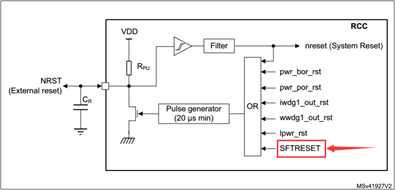
软件复位反映到实际硬件上,就是给硬件复位部分发一个复位信号:
STM32H7有如下六种时钟可供使用:
HSI是内部的高速RC振荡器,频率64MHz,可被用于系统时钟。优势是低成本,无需外部时钟,快速启动(仅需几个微秒),缺点是精度差,即使经过校准。
HSE是外部的高速振荡器,通过外接时钟源,有源或者无源晶振驱动,时钟范围4-48MHz。优势是精度高,缺点是增加成本。
LSE是外部的低速振荡器,通过外接时钟源,有源或者无源晶振驱动,一般接32.768KHz,主要用于RTC实时时钟。
LSI是内部的低速RC振荡器,频率约是32KHz,主要用于独立看门狗和自动唤醒,也可以用于RTC实时时钟。
CSI是内部的低速振荡器,频率约是4MHz,相比64MHz的HSI,主要用于低功耗。
HSI48是内部高速振荡器,频率约是48MHz,用于给特定的外设提供时钟,比如USB。
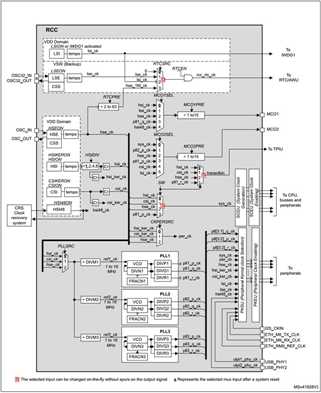
通过下面的时钟树再进一步的认识这几个时钟:
当前V7开发板是用的25MHz晶振为HSE提供时钟,硬件设计如下:
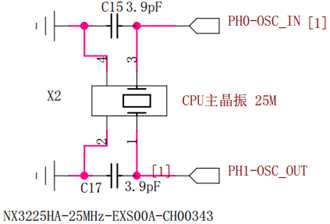
晶振和负载电容需要尽可能近地靠近H7的晶振引脚,以减小输出失真和启动稳定时间。负载电容值必须根据选定的晶振进行调节。
对于C15和C17,我们推荐使用高质量陶瓷电容,这种电容是设计用于需要高频率的场合,并且可以满足晶体或谐振器的需求。C15和C17通常具有相同的值。
这里再额外补充一个知识点,HSE旁路时钟和外置晶振区别:当前V7板子是采用的外置晶振模式,高速外部 (HSE) 时钟可以使用一个4到48MHz 的晶振 / 陶瓷谐振振荡器产生:
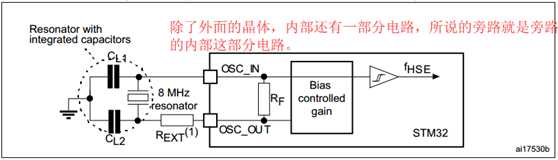
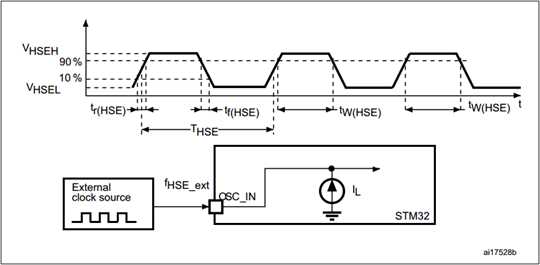
而bypass 旁路的意思就是不使用它,绕过它。具体到HSE旁路的话,用户直接提供4-50MHz的时钟源即可,可以使用有源晶振或者FPGA提供时钟等方式:
当前V7开发板是用的32768Hz晶振为LSE提供时钟,硬件设计如下:
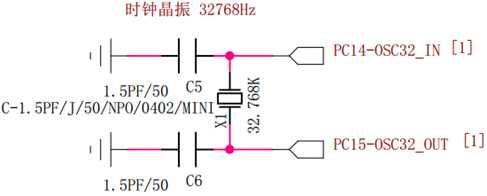
STM32的LSE晶振起振难(又称RTC起振)是老毛病了,选取晶振和配套电容比较讲究,最好按照ST提供的厂家和配套电容选取:http://forum.armfly.com/forum.php?mod=viewthread&tid=87673 。
STM32H7开发板使用的外部晶振频率是25MHz,下面分步说明如何让其通过这个频率工作到400MHz的主频。
配置的大小要跟板子的实际晶振大小匹配。
#if !defined (HSE_VALUE) #define HSE_VALUE ((uint32_t)8000000) /*!< Value of the External oscillator in Hz */ #endif /* HSE_VALUE */
Reset_Handler PROC EXPORT Reset_Handler [WEAK] IMPORT SystemInit IMPORT __main LDR R0, =SystemInit BLX R0 LDR R0, =__main BX R0 ENDP
以往STM32F1和STM32F4系列都会在函数SystemInit里面配置PLL锁相环,使用了HAL后,需要在main函数里面配置。当前SystemInit函数实现的功能如下:
1. /** 2. * @brief Setup the microcontroller system 3. * Initialize the FPU setting, vector table location and External memory 4. * configuration. 5. * @param None 6. * @retval None 7. */ 8. void SystemInit (void) 9. { 10. /* FPU settings ------------------------------------------------------------*/ 11. #if (__FPU_PRESENT == 1) && (__FPU_USED == 1) 12. SCB->CPACR |= ((3UL << 10*2)|(3UL << 11*2)); /* set CP10 and CP11 Full Access */ 13. #endif 14. /* Reset the RCC clock configuration to the default reset state ------------*/ 15. /* Set HSION bit */ 16. RCC->CR |= RCC_CR_HSION; 17. 18. /* Reset CFGR register */ 19. RCC->CFGR = 0x00000000; 20. 21. /* Reset HSEON, CSSON , CSION,RC48ON, CSIKERON PLL1ON, PLL2ON and PLL3ON bits */ 22. RCC->CR &= (uint32_t)0xEAF6ED7F; 23. 24. /* Reset D1CFGR register */ 25. RCC->D1CFGR = 0x00000000; 26. 27. /* Reset D2CFGR register */ 28. RCC->D2CFGR = 0x00000000; 29. 30. /* Reset D3CFGR register */ 31. RCC->D3CFGR = 0x00000000; 32. 33. /* Reset PLLCKSELR register */ 34. RCC->PLLCKSELR = 0x00000000; 35. 36. /* Reset PLLCFGR register */ 37. RCC->PLLCFGR = 0x00000000; 38. /* Reset PLL1DIVR register */ 39. RCC->PLL1DIVR = 0x00000000; 40. /* Reset PLL1FRACR register */ 41. RCC->PLL1FRACR = 0x00000000; 42. 43. /* Reset PLL2DIVR register */ 44. RCC->PLL2DIVR = 0x00000000; 45. 46. /* Reset PLL2FRACR register */ 47. 48. RCC->PLL2FRACR = 0x00000000; 49. /* Reset PLL3DIVR register */ 50. RCC->PLL3DIVR = 0x00000000; 51. 52. /* Reset PLL3FRACR register */ 53. RCC->PLL3FRACR = 0x00000000; 54. 55. /* Reset HSEBYP bit */ 56. RCC->CR &= (uint32_t)0xFFFBFFFF; 57. 58. /* Disable all interrupts */ 59. RCC->CIER = 0x00000000; 60. 61. /* Change the switch matrix read issuing capability to 1 for the AXI SRAM target (Target 7) */ 62. *((__IO uint32_t*)0x51008108) = 0x00000001; 63. 64. #if defined (DATA_IN_ExtSRAM) || defined (DATA_IN_ExtSDRAM) 65. SystemInit_ExtMemCtl(); 66. #endif /* DATA_IN_ExtSRAM || DATA_IN_ExtSDRAM */ 67. 68. /* Configure the Vector Table location add offset address ------------------*/ 69. #ifdef VECT_TAB_SRAM 70. SCB->VTOR = D1_AXISRAM_BASE | VECT_TAB_OFFSET; /* Vector Table Relocation in Internal ITCMSRAM */ 71. #else 72. SCB->VTOR = FLASH_BANK1_BASE | VECT_TAB_OFFSET; /* Vector Table Relocation in Internal FLASH */ 73. #endif 74. 75. }
第12行:使能FPU单元。
第16 – 59行:复位RCC相关寄存器。
第62行:这条语句在这里的作用涉及到STM32H7硬件版本Y的一个bug解决方案,详情可以看这个帖子:http://forum.armfly.com/forum.php?mod=viewthread&tid=87346 。
第69 – 73行:设置中断向量表的位置。
本章节就为大家讲解这么多,本章节的知识点相对比较多,比较杂,不容易一下子都掌握了。随着后面章节的进行,还会深入的讲解这些知识点。
【STM32H7教程】第14章 STM32H7的电源,复位和时钟系统
标签:快速 span 了解 LLC 缺点 == 外部 滤波 除了
原文地址:https://www.cnblogs.com/armfly/p/10794292.html