标签:点对点 inf 不用 通信 apt alt http .com 图片
PR2: personal robot 2

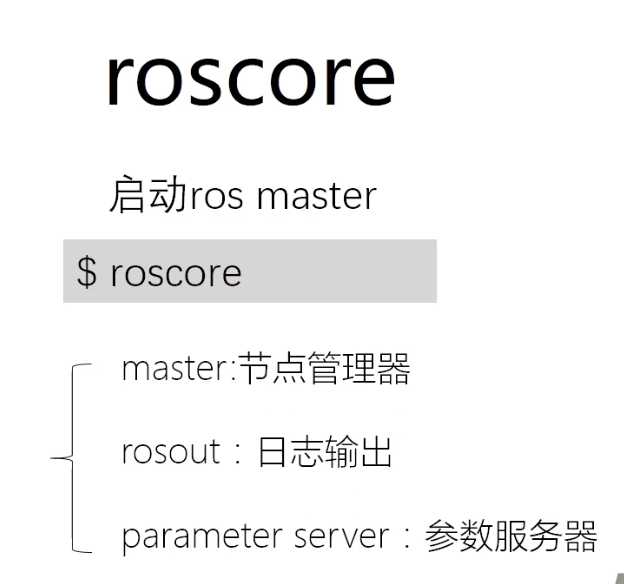
如何管理进程和它们之间的通信?

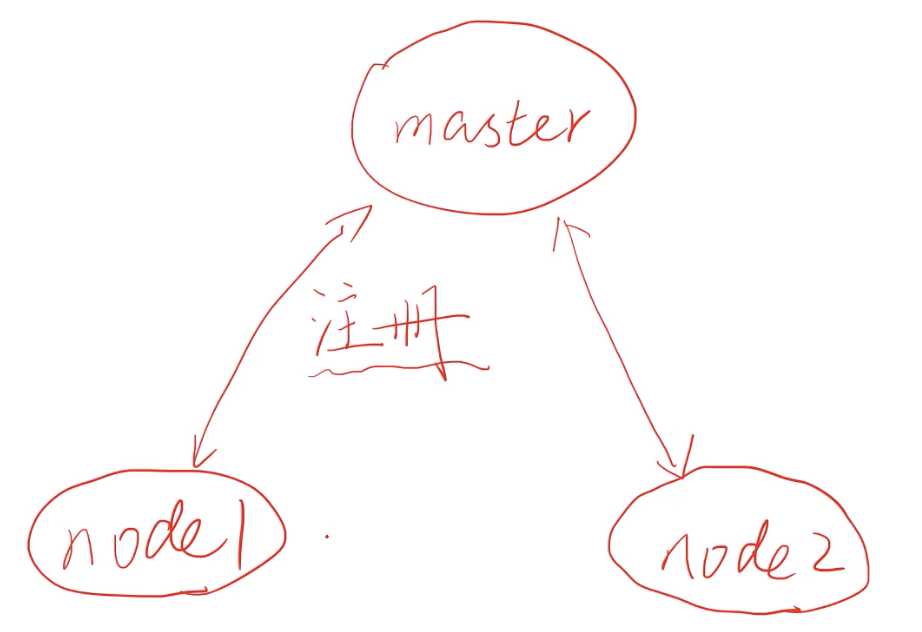
node1 and 2 先在master上面注册,然后点对点通信
所以要通过roscore这个命令启动ros master
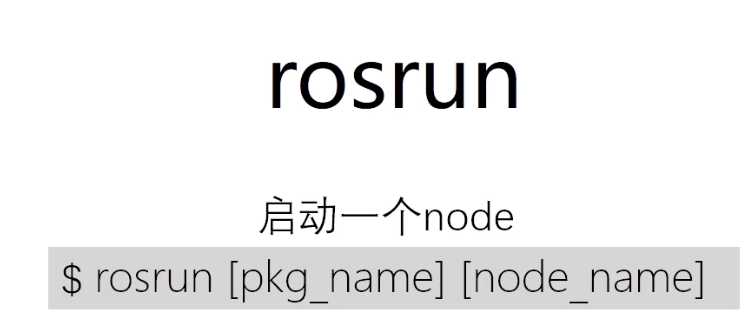

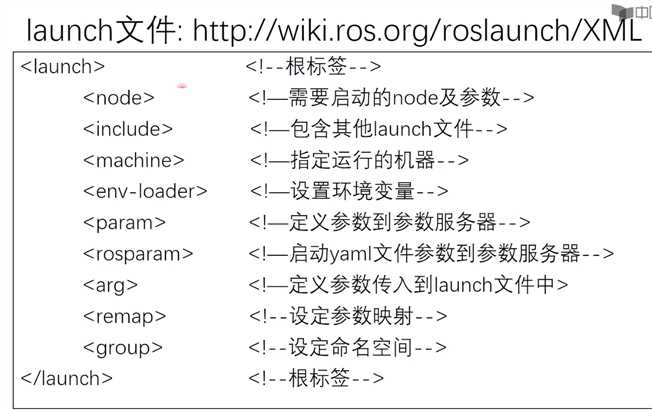
多个node启动,不用一个个启动,写launch文件
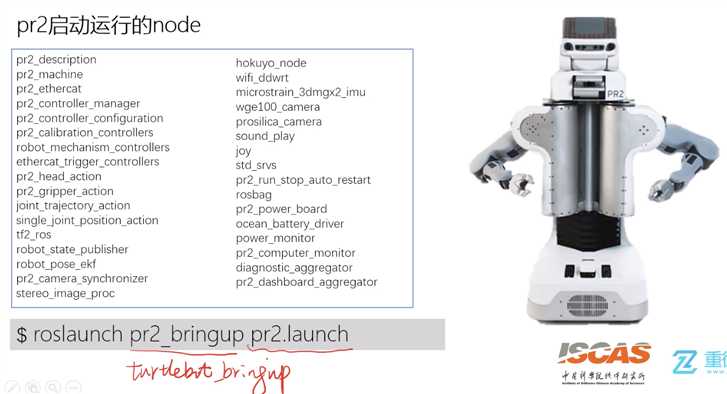
bringup就是最核心启动的东西
[ROS] Chinese MOOC || Chapter-3.1 Master and Node
标签:点对点 inf 不用 通信 apt alt http .com 图片
原文地址:https://www.cnblogs.com/ecoflex/p/10801537.html