标签:返回 传输 byte its res 项目 ast idt tar
平台:vivado 2016.4
FPGA:A7
在实际应用中,我们几乎不可能自己去编写接口协议,所以在IP核的例程上进行修改来适用于项目是个不错的选择。
通过vivado 中有关PCIe的IP核,生成相应的例程,综合之后可以得到如下图的工程结构。
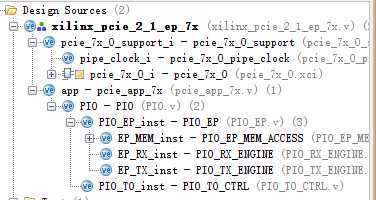

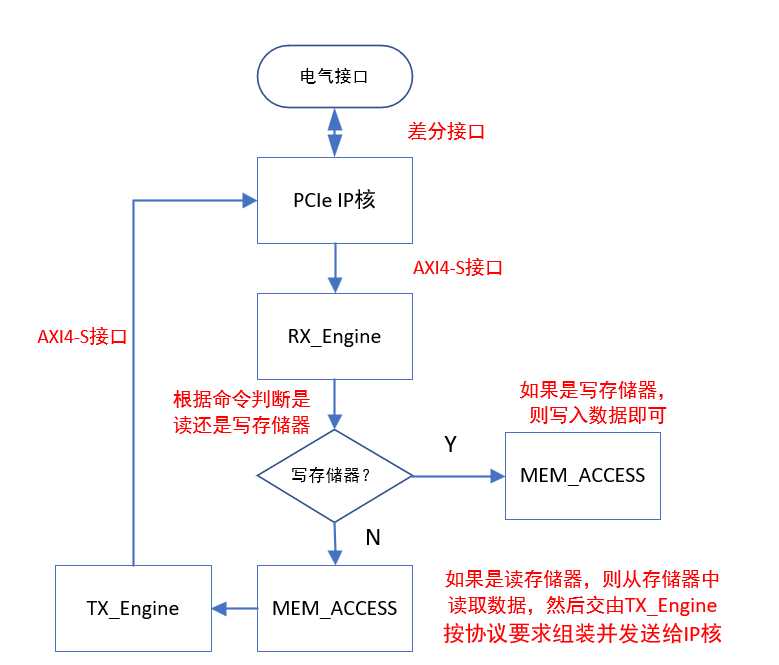
如果在自己的项目中直接使用IP核的话,生成的只有pcie_7x_0这个模块,在应用层面还需要编写相应的解析和组装模块。好在该例程已经帮我们把这部分模块编写好了。例程简单的工作流程图如下图所示。
关于PCIe入门的简单协议介绍,可以参考博文 FPGA实战操作(2) -- PCIe总线(协议简述)。
例程在PCIe核的基础上,已经为用户设计好了应用层模块。用户在使用的过程中只需要在应用层上稍加修改(例程是个闭环系统,需要将收发模块的部分接口对接到自己项目中),就可以将整个例程移植到自己的项目中了。
下面主要分析应用层模块中的PIO_RX_ENGINE、PIO_TX_ENGINE这两个核心模块。
PIO_RX_ENGINE接口层面主要实现三个功能:将PCIe IP核传递过来的TLP包解析,之后将结果一部分用于控制存储器读取数据,一部分解析结果(协议有效字段)发送给PIO_TX_ENGINE,在需要反馈报文时用。
有关数据的解析,主要由下图状态机控制完成。程序中支持64位宽和128位宽,通过C_DATA_WIDTH来判断执行不同部分。
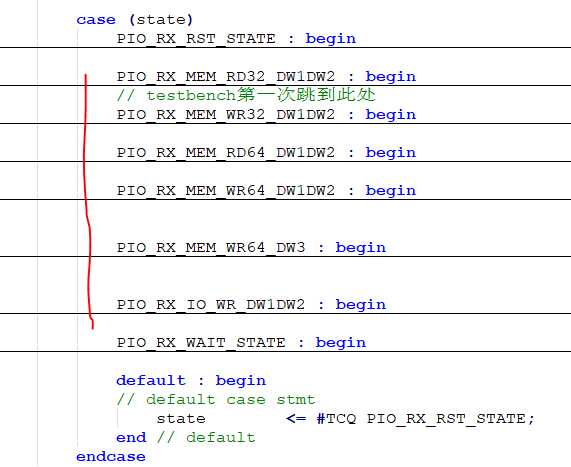
状态机状态state首先进入PIO_RX_RST_STATE,在PIO_RX_RST_STATE中完成数据关键字段的解析,根据解析的结果来执行中间几个状态(红线),这几个执行状态主要根据命令来完成相应的操作,执行完毕后进入PIO_RX_WAIT_STATE。
下面对几个关键状态里的内容进行简单分析。
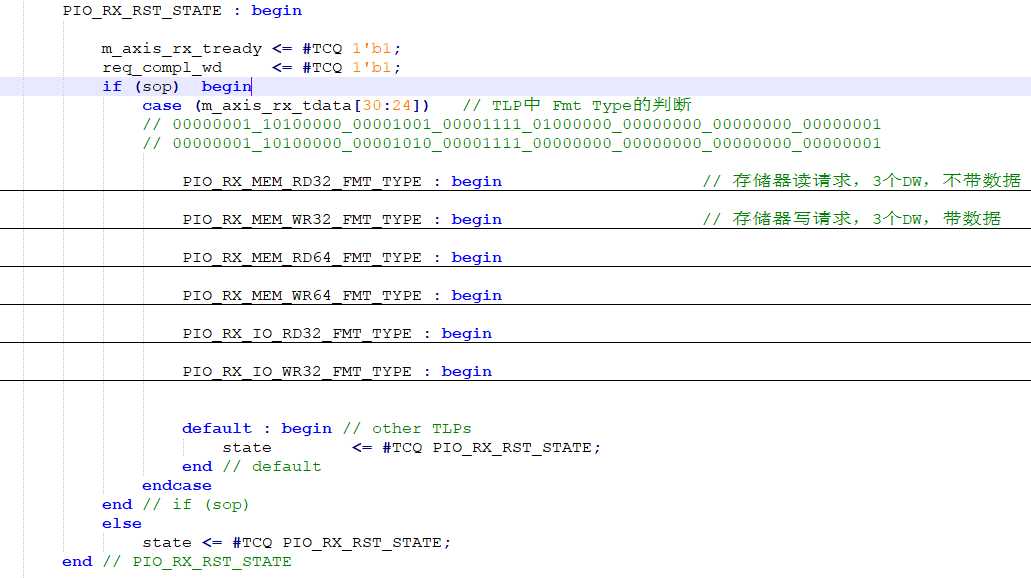
程序首先进入PIO_RX_RST_START 状态,这是一个复位状态。在复位状态中,首先判断sop 信号是否有效,sop 信号是TLP开始的信号,若这个信号无效,则程序会一直在复位状态中直到sop 信号有效;若sop 信号有效,则执行嵌套的一段case语句,case的条件是m_axis_rx_tdata[30:24],研究TLP协议包会发现,该字段对应的是Fmt+Type字段,代表TLP确定的事务类型,实际上就是命令操作,让你干什么。
事务类型的case中,只介绍PIO_RX_MEM_RD32_FMT_TYPE,实际即32位寻址的读事务。在PIO_RX_MEM_RD32_FMT_TYPE状态中,按照TLP协议包格式,将各字段数据锁存入相应的寄存器中,可以参见后面的注释。其它的事务类型的操作都大同小异,就是锁存所需字段,执行相应的操作。
case (m_axis_rx_tdata[30:24]) // TLP中 Fmt Type的判断
// 00000001_10100000_00001001_00001111_01000000_00000000_00000000_00000001
// 00000001_10100000_00001010_00001111_00000000_00000000_00000000_00000001
// m_axis_rx_tdata[30:24] = 1000000 ,执行 PIO_RX_MEM_WR32_FMT_TYPE
PIO_RX_MEM_RD32_FMT_TYPE : begin // 存储器读请求,3个DW,不带数据
tlp_type <= #TCQ m_axis_rx_tdata[31:24]; // 锁存TLP类型,即Fmt+Type
req_len <= #TCQ m_axis_rx_tdata[9:0]; // 锁存TLP数据包长度,单位是DW
m_axis_rx_tready <= #TCQ 1'b0; // 未准备好
if (m_axis_rx_tdata[9:0] == 10'b1) begin // 若数据长度为1DW
req_tc <= #TCQ m_axis_rx_tdata[22:20];
req_td <= #TCQ m_axis_rx_tdata[15];
req_ep <= #TCQ m_axis_rx_tdata[14];
req_attr <= #TCQ m_axis_rx_tdata[13:12];
req_len <= #TCQ m_axis_rx_tdata[9:0];
req_rid <= #TCQ m_axis_rx_tdata[63:48]; // Reverse ID
req_tag <= #TCQ m_axis_rx_tdata[47:40]; // Tag字段的长度决定发送端能够暂存多少
req_be <= #TCQ m_axis_rx_tdata[39:32]; // TLP使用 last DW BE和first DW BE这两个字段
state <= #TCQ PIO_RX_MEM_RD32_DW1DW2; // 表示从存储器中读取DW1和DW2
end // if (m_axis_rx_tdata[9:0] == 10'b1)
else begin
state <= #TCQ PIO_RX_RST_STATE;
end // if !(m_axis_rx_tdata[9:0] == 10'b1)
end // PIO_RX_MEM_RD32_FMT_TYPE注意:在介绍协议的时候,都是基于DW(32位)介绍,但在通过AXI4总线进行数据交换时,采用的是64位宽或者128位宽,所以要注意一下,数据大小端拼接。
在执行完成PIO_RX_MEM_RD32_FMT_TYPE状态之后,主状态机跳转至PIO_RX_MEM_RD32_DW1DW2状态,表示要执行读操作的配置工作。
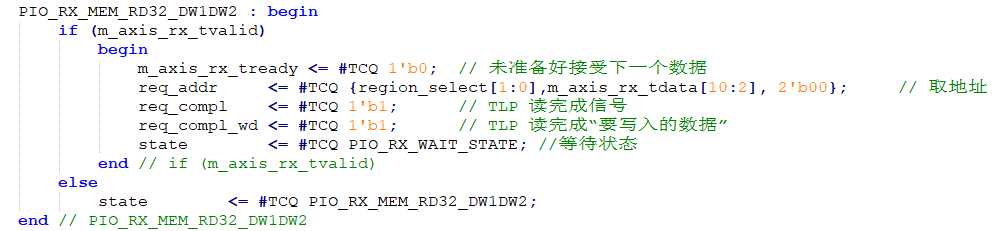
由PCIe通信机制可知,存储器读请求是需要反馈完成报文的,而且这个完成报文反馈包括两方面:第一,TLP协议有些固定字段,要反馈;第二,从存储器指定地址下的数据,要反馈。
req_addr 表示需要读取的存储器的地址,req_compl 表示需要发送完成报文,req_compl_wd 表示完成报文中包含数据,然后跳转到PIO_RX_WAIT_STATE 状态。
PIO_RX_WAIT_STATE 状态没什么好说的。
PIO_TX_ENGINE结构与PIO_RX_ENGINE类似,也是由状态机完成,主要执行组装封包功能。
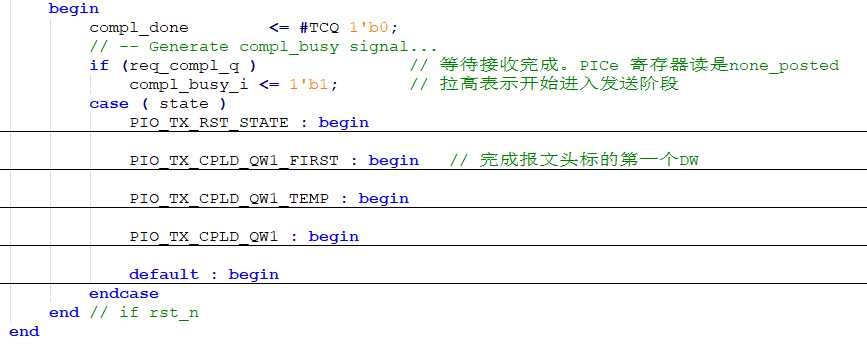
着重看一下PIO_TX_CPLD_QW1_FIRST和PIO_TX_CPLD_QW1两个状态。
PIO_TX_CPLD_QW1_FIRST : begin // 完成报文头标的第一个DW
if (s_axis_tx_tready) begin
s_axis_tx_tlast <= #TCQ 1'b0;
s_axis_tx_tdata <= #TCQ { // Bits
completer_id, // 16
{3'b0}, // 3 完成状态,000--成功完成
{1'b0}, // 1
byte_count, // 12
{1'b0}, // 1
(req_compl_wd_q ? // 看此包带不带数据
PIO_CPLD_FMT_TYPE :
PIO_CPL_FMT_TYPE), // 7
{1'b0}, // 1
req_tc, // 3
{4'b0}, // 4
req_td, // 1
req_ep, // 1
req_attr, // 2
{2'b0}, // 2
req_len // 10
};
s_axis_tx_tkeep <= #TCQ 8'hFF;
state <= #TCQ PIO_TX_CPLD_QW1_TEMP;
end
else
state <= #TCQ PIO_TX_RST_STATE;
end //PIO_TX_CPLD_QW1_FIRST这个状态中传输第一帧(64bit)数据,由TLP协议可知,第一帧数据主要反馈的Head信息,即头标的前2DW数据,其中通过req_compl_wd_q 信号判定这个完成包是否带有数据,同时因为这一帧信号都是有效的信号,所以s_axis_tx_tkeep 为FF。
PIO_TX_CPLD_QW1 : begin
if (s_axis_tx_tready) begin
s_axis_tx_tlast <= #TCQ 1'b1;
s_axis_tx_tvalid <= #TCQ 1'b1;
// Swap DWORDS for AXI
s_axis_tx_tdata <= #TCQ { // Bits
rd_data, // 32
req_rid, // 16
req_tag, // 8
{1'b0}, // 1
lower_addr // 7
};
// Here we select if the packet has data or
// not. The strobe signal will mask data
// when it is not needed. No reason to change
// the data bus.
if (req_compl_wd_q)
s_axis_tx_tkeep <= #TCQ 8'hFF;
else
s_axis_tx_tkeep <= #TCQ 8'h0F;
compl_done <= #TCQ 1'b1;
compl_busy_i <= #TCQ 1'b0;
state <= #TCQ PIO_TX_RST_STATE;
end // if (s_axis_tx_tready)
else
state <= #TCQ PIO_TX_CPLD_QW1;
end // PIO_TX_CPLD_QW1在这个状态中,首先通过s_axis_tx_tready 信号判断从设备是否准备好接受信号;由于完成包由3DW标头和1DW的数据构成,总共2帧,所以这一帧是最后一帧,因此此时设置s_axis_tx_tlast为1表明这是最后一帧;然后设置s_axis_tx_tvalid为1表明此时主设备准备好发送数据;接着就根据完成包格式拼接发送数据。拼接完成后通过req_compl_wd_q设置s_axis_tx_tkeep信号,由于一次传输64bit,所以第二帧刚好1DW标头+1DW数据,这一帧都有效,所以s_axis_tx_tkeep为FF,如果这个完成包不带数据,即req_compl_wd_q无效,则最后一帧数据中只有1DW标头,那么s_axis_tx_tkeep就为0F。
至此这个带数据的完成包就发送完成了,所以设置compl_done有效,这个信号返回到接收引擎中,使得接收引擎准备接收下一个TLP,设置compl_busy_i无效,说明又可以发送完成包了,同时状态机跳转至PIO_TX_RST_STATE状态。
标签:返回 传输 byte its res 项目 ast idt tar
原文地址:https://www.cnblogs.com/rouwawa/p/10815178.html