标签:配置 details 允许 return delay boa activate oid 初始化
STM32CubeMX版本:
固件库版本:
第一步分:CubeMX软件配置。
0、工程配置以及芯片选择这里就不再赘述了,最好是勾选为每个外设生成独立的.c源文件。
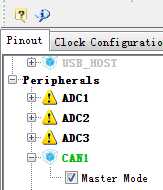
1、打开CAN外设。
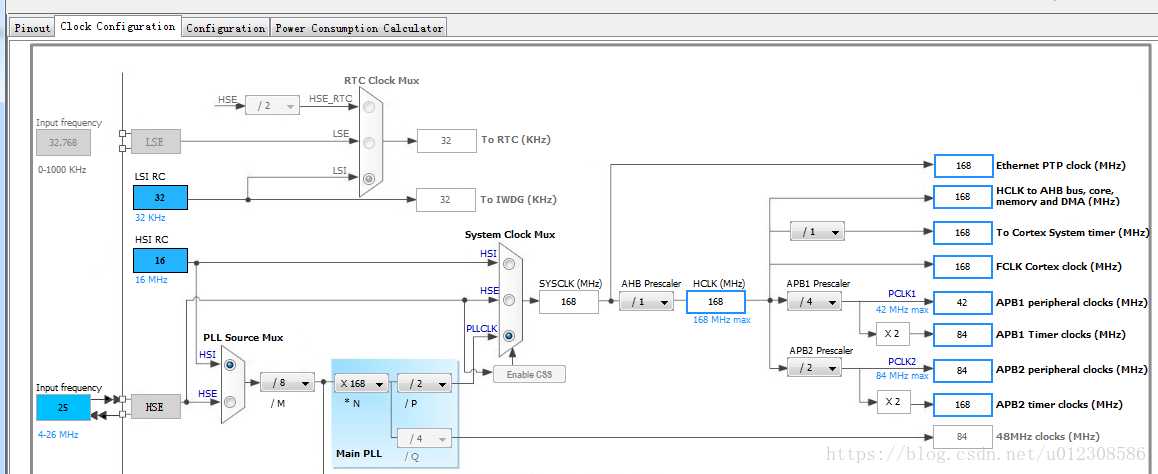
2、配置芯片时钟树。这里我使用了芯片内部HSI RC。
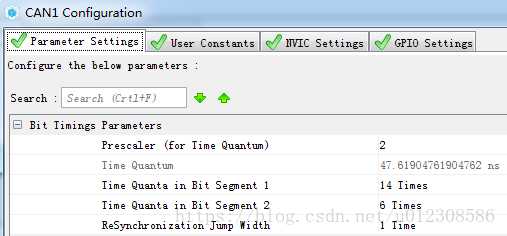
3、CAN配置。

3.1配置波特率为1Mb/s。计算方法:42M/2/(14+6+1)==1M
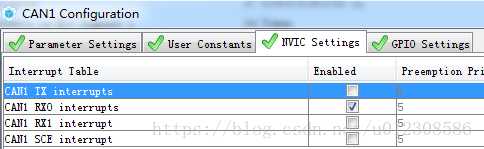
3.2、使能RX0接收中断。
到这里配置已经完成了,这里我们只配置了部分选项,其余大部分都是采用的默认配置。点击工具栏中齿轮图标,生成代码。
第二部分:代码修改。
1、打开工程,打开can.c文件,在/* USER CODE BEGIN 0 */ 和 /* USER CODE END 0 */ 之间添加以下内容。
#include "main.h"
#define F407VET6_BOARD_CAN_ID 0x001
#define SENSOR_BOARD_CAN_ID 0x002
#define ANOTHER_SENSOR_BOARD_CAN_ID 0x003
#define THIRD_SENSOR_BOARD_CAN_ID 0x004
//2个3级深度的FIFO
#define CAN1FIFO CAN_RX_FIFO0
#define CAN2FIFO CAN_RX_FIFO1 //
CAN_TxHeaderTypeDef TxMeg;
CAN_RxHeaderTypeDef RxMeg;
void CAN_User_Init(CAN_HandleTypeDef* hcan ) //用户初始化函数
{
CAN_FilterTypeDef sFilterConfig;
HAL_StatusTypeDef HAL_Status;
TxMeg.IDE=CAN_ID_STD;//CAN_ID_EXT;
TxMeg.RTR=CAN_RTR_DATA;
sFilterConfig.FilterBank = 0; //过滤器0
sFilterConfig.FilterMode = CAN_FILTERMODE_IDLIST; //设为列表模式
sFilterConfig.FilterScale = CAN_FILTERSCALE_16BIT;
sFilterConfig.FilterIdHigh = F407VET6_BOARD_CAN_ID<<5; //基本ID放入到STID中
sFilterConfig.FilterIdLow = SENSOR_BOARD_CAN_ID <<5;
sFilterConfig.FilterMaskIdHigh =ANOTHER_SENSOR_BOARD_CAN_ID<<5;
sFilterConfig.FilterMaskIdLow =THIRD_SENSOR_BOARD_CAN_ID <<5;
sFilterConfig.FilterFIFOAssignment = CAN1FIFO; //接收到的报文放入到FIFO0中
sFilterConfig.FilterActivation = ENABLE; //激活过滤器
sFilterConfig.SlaveStartFilterBank = 0;
HAL_Status=HAL_CAN_ConfigFilter(hcan, &sFilterConfig);
HAL_Status=HAL_CAN_Start(&hcan1); //开启CAN
if(HAL_Status!=HAL_OK){
printf("开启CAN失败\r\n");
}
HAL_Status=HAL_CAN_ActivateNotification(&hcan1, CAN_IT_RX_FIFO0_MSG_PENDING);
if(HAL_Status!=HAL_OK){
printf("开启挂起中段允许失败\r\n");
}
}
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan) //接收回调函数
{
uint8_t Data[8];
HAL_StatusTypeDef HAL_RetVal;
if(hcan ==&hcan1){
HAL_RetVal=HAL_CAN_GetRxMessage(&hcan1, CAN1FIFO, &RxMeg, Data);
if ( HAL_OK==HAL_RetVal)
{
//在这里接收数据
}
}
//发送数据函数
uint8_t CANx_SendNormalData(CAN_HandleTypeDef* hcan,uint16_t ID,uint8_t *pData,uint16_t Len)
{
HAL_StatusTypeDef HAL_RetVal;
uint16_t SendTimes,SendCNT=0;
uint8_t FreeTxNum=0;
TxMeg.StdId=ID;
if(!hcan || ! pData ||!Len) return 1;
SendTimes=Len/8+(Len%8?1:0);
FreeTxNum=HAL_CAN_GetTxMailboxesFreeLevel(&hcan1);
TxMeg.DLC=8;
while(SendTimes--){
if(0==SendTimes){
if(Len%8)
TxMeg.DLC=Len%8;
}
while(0==FreeTxNum){
FreeTxNum=HAL_CAN_GetTxMailboxesFreeLevel(&hcan1);
}
HAL_Delay(1); //没有延时很有可能会发送失败
HAL_RetVal=HAL_CAN_AddTxMessage(&hcan1,&TxMeg,pData+SendCNT,(uint32_t*)CAN_TX_MAILBOX0);
if(HAL_RetVal!=HAL_OK)
{
return 2;
}
SendCNT+=8;
}
return 0;
}
2、在main.c中添加can.h头文件,然后在 /* USER CODE BEGIN 2 */ 和 /* USER CODE END 2 */ 之间调用用户初始化CAN函数。
CAN_User_Init( &hcan1 );
OK,CAN收发的基本就可以了。
---------------------
作者:Endless-Code
来源:CSDN
原文:https://blog.csdn.net/u012308586/article/details/81001102
版权声明:本文为博主原创文章,转载请附上博文链接!
STM32CubeMX stm32F4 CAN 使用步骤--全文复制粘贴
标签:配置 details 允许 return delay boa activate oid 初始化
原文地址:https://www.cnblogs.com/schoolmate-li/p/10916456.html